



基于ADAMS的助老起升裝置的運動學仿真分析 
摘 要: 針對老年人在如廁時由于膝關節(jié)老化而難以站立的問題,設計了一種基于虛擬樣機技術的自動化助老起升 裝置。
2600 5
擺渡人張 ??? 2年前
基于ADAMS的點按手法運動仿真 
摘 要:為研究中醫(yī)按摩點按手法在機器人手臂上的實現(xiàn),基于ADAMS虛擬建模的方法進行機器人手臂的運動學分析,研究在六自由度機器人手臂上實現(xiàn)點按手法時各個關節(jié)的運動學相關數(shù)據(jù)。仿真結果表明,在六自由度機器人手臂上能夠很好地實現(xiàn)點按手法,并能得到每個關節(jié)的關節(jié)角隨時間的運動曲線和相關數(shù)據(jù)。
3010 2
擺渡人張 ??? 2年前
機械手臂運動仿真APP 
<p><span style="background-color: rgb(255, 255, 255); color: rgb(25, 27, 31);">機械手臂是機器人技術領域中得到廣泛實際應用的自動化機械裝置,在工業(yè)制造、醫(yī)學治療、娛樂服務、軍事、半導體制造以及太空探索等領域都能見到它的身影。
2478 1
仿真APP ??? 1年前
基于SolidWorks的自動裝卸機械結構設計 
為了 降低電機負載,和手臂關節(jié)軸對比,手臂要保證平衡,加強對機 械手的控制。
4673 5
太極元氣 ??? 2年前
RecurDyn經(jīng)典案例:象鼻機器人機械臂的優(yōu)化設計 
象鼻機器人是一種模仿象鼻行為的具有無限自由度的機械手臂,目前正在研發(fā)中。這種機械臂機器人是由一組圓盤,通過中心連接到一個柔性軸上,由一組穿過圓盤的電纜控制。電纜的末端直接連接到電機上。手臂具有連續(xù)運動,可針對特定的應用場景進行定制,例如,探查危險區(qū)域。為了優(yōu)化這種柔性機械臂的設計,需要研究幾個參數(shù):纜繩張力、纜繩末端隨時間變化的力、驅動機構所需的力、機器人的工作體積。
3366
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
基于Adams & MSC Nastran設計塑料材質的機械手臂 
公司團隊一直致力于開發(fā)一種使用聚酰胺等塑料材料的機器人手臂,這是因為目前的鑄鐵制造機器人手臂不僅很重,而且非常昂貴。 所以,泰國鋼索有限公司正在探索使用塑料等替代材料,以降低成本并降低整體重量。為了成功地用替代材料設計機械手臂,泰國鋼索正在尋找一種用戶界面友好且能提供準確結果能力的仿真模擬軟件。
2484
Cruise ??? 2年前
將任何工業(yè)機器人改成3D打印機?Adaxis增材軟件 
△機器人手臂結合3D細胞打印的示意圖在機器人技術和增材制造的結合之路上,Adaxis要看的更遠,他們的目標是無縫連接CAD系統(tǒng)和機器人編程語言,使CAD模型可以無縫成為3D打印程序,更重要的一點是充分利用機器人的旋轉和樞轉運動范圍。該公司目前正在與一些主流的CAD軟件廠商合作,并聯(lián)手相關的機器人生產(chǎn)商(到目前為止包括ABB和庫卡)共同瞄準這一目標。
2272
南極熊3D打印 ??? 4年前
[機器人學習]-樹莓派6R機械臂運動學分析 ![[機器人學習]-樹莓派6R機械臂運動學分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
1正運動學分析采用標準的D-h法進行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
2561 1
余俊煒 ??? 3年前
Ansys Speos | 智能手環(huán)心率傳感器仿真 
仿真流程第一步,機械運動中的智能手環(huán)動態(tài)運動模擬(本文不涉及)本例中只分析智能帶移動對光信號的影響。詳細的模擬內部運動過程將不包括在這個例子中。Ansys Motion是基于柔性多體動力學的先進工程解決方案。它可以在單個求解器內快速準確地分析剛體和柔體。本例模擬了一個人類手臂朝東方擺動的場景。在手臂運動的過程中,智能手環(huán)會隨之滑動。智能手環(huán)與人類手腕之間的相對位移將被輸出到Speos。
2566 1
宇熠科技 ??? 1年前
三自由度機械臂運動學分析+仿真 
三、相鄰坐標系之間的齊次變換矩陣 D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
3991
余俊煒 ??? 2年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
1正運動學分析采用標準的D-h法進行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
3035
余俊煒 ??? 3年前
外骨骼機器人未來走向哪? 
而科大訊飛則在其2022年年會上公布“訊飛超腦2030計劃”,其中詳細描述了其具有康復訓練功能的外骨骼機器人“已經(jīng)研發(fā)出原型機”這一進展。 科大訊飛表示,未來約在2023-2025年,將實現(xiàn)自適應運動功能研發(fā)的自適應行走外骨骼機器人,幫助行動不便的老年人或殘疾人自主獨立行走。 無論是創(chuàng)企的大額融資,還是巨頭的跨界研發(fā),都展現(xiàn)出對于這一賽道的看好,背后的原因到底在哪?
3170
機械工程師 ??? 3年前
六軸機械臂(帶抓手)運動學分析+軌跡規(guī)劃 
1正運動學分析 采用標準的D-h法進行機械腿模型分析: D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
5212 1
余俊煒 ??? 2年前
試驗洞悉工程 | 考察海洋樁基的循環(huán)加載裝置 
此外,還包括一些附屬機械裝置如滑輪、夾具緊固構件和彈簧等。 圖2 水平循環(huán)加載裝置 圖3為加載裝置中水平滑動系統(tǒng)的細節(jié)圖,由導軌、裝載砝碼用的小車和彈簧組成。其中,加載用的砝碼質量塊固定于由滑塊和軸承滾輪組成的導軌小車上,通過導軌實現(xiàn)平滑往復運動,在這個過程中須做好相應部件的潤滑工作,盡量減小運動過程中的摩擦阻力。
3270 2 1
CELab-001 ??? 4年前
碼垛機器人admas仿真 
機器人動力學仿真按照運動學仿真的類似步驟為機器人添加材料、運動副和關節(jié)驅動,給機器人手腕末端施加50N最大負載,仿真模型如圖5-17。
2276
余俊煒 ??? 3年前
RecurDyn機器人仿真應用及核心技術路線詳解 
此外,振動特性的分析結果有助于避免共振,確保輕量化后的機械手臂在高速運動中仍具備良好的動態(tài)性能與穩(wěn)定性。
2383 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
【米思米機械設備知識分享】- 電動缸工作原理及應用行業(yè) 
電動缸是用各種電動機(如伺服電動機、步進電動機、電動機)帶動各種螺桿(如滑動螺桿、滾珠螺桿)旋轉,通過螺母轉化為直線運動,并推動滑臺沿導軌(如滑動導軌、滾珠導軌、高剛性直線導軌)像氣缸那樣作往復直線運動。為適應不同的要求,電動缸已有多種品種規(guī)格,也有不同的名稱,如:電動滑臺、直線滑臺、工業(yè)機械手臂等。
2306
MISUMI米 ??? 3年前
船舶自動系泊系統(tǒng)最新發(fā)展 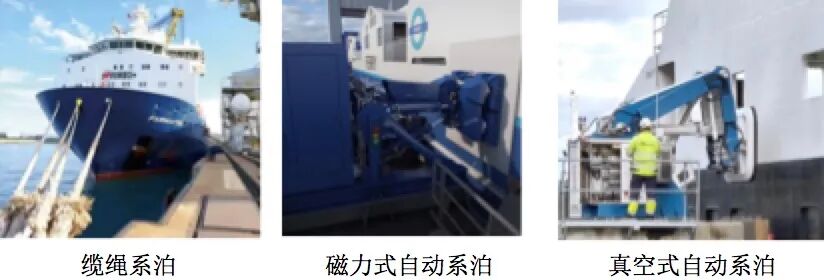
該系統(tǒng)由兩個液壓控制的手臂組成,每個手臂的末端都有一個磁板,尺寸約為1500×1500毫米,能將渡輪固定在碼頭。這種停靠方式降低了發(fā)動機的使用頻率,減少了碳排放,節(jié)省了燃料,有助于環(huán)境保護。磁板由荷蘭的Goudsmit Magnetics公司開發(fā),每塊磁板能提供8000公斤的吸引力,在液壓機械的控制下,磁板能夠抑制船舶運動,并將其牢牢固定。
3227
海工 ??? 3年前
運動控制器與PLC的本質區(qū)別,你知道嗎? 
運動控制在機器人和數(shù)控機床的領域內的應用要比在專用機器中應用更復雜,因為后者運動形式更簡單,通常被稱為通用運動控制(GMC)。
2235
非標機械論壇 ??? 4年前
【6/3更新】穿“鋼鐵俠”戰(zhàn)衣爬山,海拔700米,僅僅花了3.5分鐘 
根據(jù)吉尼斯世界紀錄,這款飛行背包的創(chuàng)始人理查德·布朗寧曾于2019年11月14日以這種噴射裝備創(chuàng)下每小時85英里(約合136公里)的最快速度世界紀錄。這套飛行服看起來并不重,在兩個手臂安裝了推進器,飛行時可以通過身體運動來控制飛行動作。它足以產(chǎn)生超過1000馬力,達到30英里/小時以上的速度。
2117
技術鄰CAD學習 ??? 3年前
20條/頁 
 15
15 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
