



ABAQUS后處理濾波器截止頻率設(shè)置多少合適?
ABAQUS后處理中使用butterworth濾波器,其中的截止頻率設(shè)置多少合適?有沒有相關(guān)資料或要求?
1988 2
小幻小想 ??? 4年前
67基于matlab圖像處理,包括顏色和亮度調(diào)整、翻轉(zhuǎn)功能、空間濾波和去噪、頻域濾波和去噪、噪聲添加 
基于matlab圖像處理,包括顏色和亮度調(diào)整、翻轉(zhuǎn)功能、空間濾波和去噪、頻域濾波和去噪、噪聲添加,形態(tài)學(xué)操作、邊緣檢測及示波器集成的GUI圖像處理。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。
2115 2
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
卡爾曼濾波和MATLAB程序詳解視頻算法與實(shí)時(shí)技術(shù)信號處理 

主要內(nèi)容包括:卡爾曼濾波數(shù)學(xué)模型及MATLAB程序輕松入門,標(biāo)準(zhǔn)卡爾曼濾波處理線性離散隨機(jī)系統(tǒng)算法再提升,卡爾曼濾波理論簡介與算法主要參數(shù)作用,卡爾曼濾波在定位和視頻跟蹤與估計(jì)實(shí)際信號等方面的應(yīng)用,擴(kuò)展卡爾曼濾波(EKF)處理非線性微分隨機(jī)系統(tǒng)及其應(yīng)用3例,無跡卡爾曼濾波(UKF)處理非線性離散隨機(jī)系統(tǒng)及其應(yīng)用,交互式多模型(IMM)濾波及其應(yīng)用與推廣問題。
2557 23
鄭一 ??? 8年前
從離散時(shí)間系統(tǒng)到 FIR 濾波器設(shè)計(jì):探索 Wolfram U 的新 MOOC 中的信號處理 
整個(gè)課程會(huì)提供有關(guān)于數(shù)據(jù)處理、音頻和圖像處理、電路建模以及設(shè)計(jì)和應(yīng)用濾波器的示例。 大多數(shù)示例都是使用 Wolfram 語言功能解決的,還包括分步解答,這些分步解答會(huì)手動(dòng)檢查每個(gè)計(jì)算,這樣可以有理解不同的概念和方法。
2710 3
墨光科技 ??? 2年前
HyperView+HyperGraph 2D_打開LS_DYNA處理生成的文件 
本期內(nèi)容講解利用HyperView和HyperGraph2D打開LS-DYNA求解器生成的D3PLOT,rcforc等文件。
8
Sahariver ??? 5年前
Hyperworks批處理調(diào)用方法總結(jié) 
三、HyperGraph調(diào)用(曲線后處理)Batch:"D:\hypermeshinstall\hwdesktop\hw\bin\win64\hw.exe" -b -clientconfig hwplot.dat -tcl getHistoryData.tclTcl文件示例(獲取X-Y曲線):# hwc hwd window type="HyperGraph 2D"
# 定義文件路徑
2414 2
TreatLee ??? 4月前
濾波器 | 仿真、優(yōu)化和基于測量的建模顯著加快設(shè)計(jì)進(jìn)程 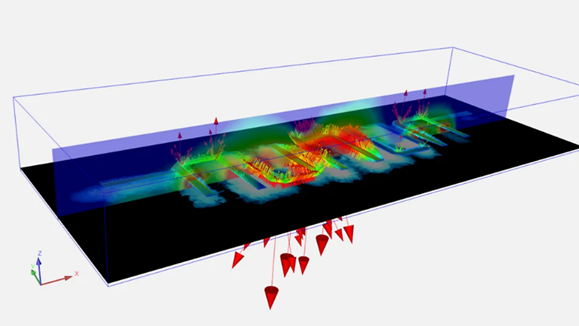
Ansys HFSS 3D電磁(EM)仿真使設(shè)計(jì)人員能夠?qū)Ω哳l電子產(chǎn)品進(jìn)行建模,如:天線、天線陣列、射頻(RF)或微波組件、高速互連、濾波器、連接器、集成芯片(IC)封裝與印刷電路板 HFSS有兩種模式:3D模式和3D Layout模式,后者非常適合處理分層電路板幾何結(jié)構(gòu)問題或高速組件(如IC封裝、片上嵌入式無源組件和PCB互連)的布局問題。
3217 11 2
Ansys中國 ??? 3年前
HyperGraph_曲線運(yùn)算 
利用HyperGraph進(jìn)行數(shù)據(jù)的后處理操作,不必導(dǎo)出到Excel中,而是直接處理和分析結(jié)果。
3
Sahariver ??? 2年前
FRED應(yīng)用:激光空間濾波器的模擬 
左:光場已經(jīng)使用空間濾波器正確的重新合成。右:沒有光場合成,所有復(fù)合光線暢通無阻地通過空間濾波器,同時(shí)忽略了剪裁。FRED具有使用高斯子束模擬相干光傳輸?shù)哪芰ΑT摲椒ㄟm用于光線在自由空間傳播,剪裁光束的光學(xué)元件應(yīng)該小心處理。正如空間濾波器,非常小的孔徑需要光場的重新合成以精確的模擬光束的剪裁。使用一個(gè)簡單的例子,Gabor分解已經(jīng)證實(shí)可以準(zhǔn)確的模擬激光系統(tǒng)中空間濾波器的影響。
682
追光ing ??? 10天前
激光空間濾波器的模擬 
左:光場已經(jīng)使用空間濾波器正確的重新合成。右:沒有光場合成,所有復(fù)合光線暢通無阻地通過空間濾波器,同時(shí)忽略了剪裁。 FRED具有使用高斯子束模擬相干光傳輸?shù)哪芰ΑT摲椒ㄟm用于光線在自由空間傳播,剪裁光束的光學(xué)元件應(yīng)該小心處理。正如空間濾波器,非常小的孔徑需要光場的重新合成以精確的模擬光束的剪裁。使用一個(gè)簡單的例子,Gabor分解已經(jīng)證實(shí)可以準(zhǔn)確的模擬激光系統(tǒng)中空間濾波器的影響。
1964
追光ing ??? 3年前
飛控中的IIR二階濾波器 
誰能想到一個(gè)二階濾波器而已,不過十幾行代碼,里面有這么多數(shù)字信號處理的知識呢?
2287
無人機(jī)干貨鋪 ??? 3年前
FRED案例展示:空間濾波器 
右:在沒有場合成的情況下,所有復(fù)雜光線都會(huì)暢通無阻地通過空間濾波器,并且會(huì)忽略裁剪。FRED 能夠使用高斯細(xì)電子束傳播對相干波場傳播進(jìn)行建模。雖然這種方法適用于光的自由空間傳播,但應(yīng)小心處理夾住光束之間的光學(xué)元件。非常小的孔徑(例如空間濾波器)需要重新合成光場,以準(zhǔn)確模擬光束的剪切。通過一個(gè)簡單的例子,Gabor 分解已經(jīng)證明可以正確模擬在激光系統(tǒng)中使用空間濾波器的效果。
2344
追光ing ??? 10月前
FRED案例展示:空間濾波器
右:在沒有場合成的情況下,所有復(fù)雜光線都會(huì)暢通無阻地通過空間濾波器,并且會(huì)忽略裁剪。FRED 能夠使用高斯細(xì)電子束傳播對相干波場傳播進(jìn)行建模。雖然這種方法適用于光的自由空間傳播,但應(yīng)小心處理夾住光束之間的光學(xué)元件。非常小的孔徑(例如空間濾波器)需要重新合成光場,以準(zhǔn)確模擬光束的剪切。通過一個(gè)簡單的例子,Gabor 分解已經(jīng)證明可以正確模擬在激光系統(tǒng)中使用空間濾波器的效果。
2417
追光ing ??? 1年前
粒子濾波PF及MATLAB程序詳解視頻和輔助及正則粒子濾波RPF實(shí)時(shí)跟蹤 
需要了解卡爾曼濾波基礎(chǔ),36分鐘,有程序)17、PF17_粒子濾波處理二維運(yùn)動(dòng)粒子對象的跟蹤實(shí)例及其效果分析(44分鐘,有程序)18、PF18_粒子濾波對比擴(kuò)展及無跡卡爾曼濾波方法分析非線性數(shù)模問題(需要了解擴(kuò)展卡爾曼濾波和無跡卡爾曼濾波基礎(chǔ),53分鐘,有程序)? ?第五章 ?粒子濾波(PF)處理視頻跟蹤問題19、PF19_1.視頻人物視覺跟蹤中的顏色RGB及HSV模式處理方法
1602 1
鄭一 ??? 8年前
數(shù)字信號處理 
第 6 步: 現(xiàn)在,主要組件是數(shù)字信號處理器。它利用 CMOS 芯片制造數(shù)字信號處理器。第 7 步:現(xiàn)在它使用數(shù)字信號處理器,這對于比較 ADC 的采集速率與 DAC 的轉(zhuǎn)換速率非常重要。第 8 步:在這里,我們使用低通濾波器,即平滑濾波器,它去除不必要的高頻分量并優(yōu)化輸出。第 9 步:在最后階段,我們使用運(yùn)算放大器作為具有輸出傳感器(即揚(yáng)聲器)的放大器。
2214 2
仿真資料吧 ??? 1年前
干貨 | 一文通吃所有整流濾波電路 
一般直流穩(wěn)壓電源都使用220伏市電作為電源,經(jīng)過變壓、整流、濾波后輸送給穩(wěn)壓電路進(jìn)行穩(wěn)壓,最終成為穩(wěn)定的直流電源。這個(gè)過程中的變壓、整流、濾波等電路可以看作直流穩(wěn)壓電源的基礎(chǔ)電路,沒有這些電路對市電的前期處理,穩(wěn)壓電路將無法正常工作。
1937
電子工程世界EEWorld ??? 4年前
非局部均值濾波和MATLAB程序詳解視頻算法及其保留圖形細(xì)節(jié)應(yīng)用 
(10分鐘)第二章 ?非局部均值濾波類算法入門3、NLM3_彩圖表示和索引表及轉(zhuǎn)灰度圖處理的MATLAB程序分析演示(小波轉(zhuǎn)用)(29分鐘,有程序)4、NLM4_均值濾波算法的MATLAB程序詳細(xì)解讀及數(shù)值指標(biāo)分析(45分鐘,有程序)5、NLM5_1非局域均值濾波算法及均值濾波的原理分析(59分鐘)6、NLM6_21NLM算法高斯噪聲及邊界處理與高斯加權(quán)歐式距離等MATLAB程序詳細(xì)解讀
1476 1
鄭一 ??? 8年前
集成了多功能數(shù)字音頻信號處理功能的單芯片全數(shù)字音頻放大器 
NTP8818配備混音器和雙四分頻濾波器,可實(shí)現(xiàn)響度控制、揚(yáng)聲器響應(yīng)補(bǔ)償及參數(shù)均衡等核心音頻處理功能。NTP8818的所有功能都可以通過I2C主機(jī)接口總線的內(nèi)部寄存器值進(jìn)行控制。
1806
如果我年少有為 ??? 7月前
集成了多功能數(shù)字音頻信號處理功能的雙通道數(shù)字輸入功放IC 
結(jié)構(gòu)圖: ?數(shù)字功放芯片 - NTP8910A特性描述:2通道立體聲(10W x 2 BTL)工作電源電壓范圍:4.5V~20VSDATA Generator (I2S輸出)浮點(diǎn)運(yùn)算32個(gè)可編程雙四分量濾波器:-揚(yáng)聲器補(bǔ)償-低通濾波器,高通濾波器,直流切斷-參量均衡器IBB(智能低音增強(qiáng))3波段動(dòng)態(tài)范圍控制;DRC
2141
如果我年少有為 ??? 8月前
采用先進(jìn)的數(shù)字信號處理技術(shù)和具備DSP多通道輸出的音頻功放IC-NTP8204G 
NTP8204G配備混頻器和雙四分頻濾波器,可實(shí)現(xiàn)響度控制、揚(yáng)聲器響應(yīng)補(bǔ)償及參數(shù)均衡等核心音頻信號處理功能。NTP8204G的所有功能均可通過I2C主機(jī)接口總線的內(nèi)部寄存器值進(jìn)行控制。NTP8204G采用行業(yè)標(biāo)準(zhǔn)的Inter IC Control(I2C)總線與主機(jī)IC通信。主機(jī)IC可通過I2C總線對NTP8204G的內(nèi)部寄存器進(jìn)行寫入或讀取操作。
1309
如果我年少有為 ??? 4月前
20條/頁 
 26
26 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
