



小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
首先,利用SolidWorks建立四足機(jī)器人的三維模型,在Adams中建立虛擬樣機(jī),設(shè)置環(huán)境模擬量模擬四足機(jī)器人在現(xiàn)實(shí)環(huán)境中的運(yùn)動(dòng)和狀態(tài)。然后,為實(shí)現(xiàn)四足機(jī)器人穩(wěn)定行走,需要實(shí)時(shí)地對(duì)四足機(jī)器人狀態(tài)進(jìn)行分析和控制。Adams和Matlab的聯(lián)合仿真可實(shí)現(xiàn)這一過(guò)程。整個(gè)過(guò)程中Adams虛擬樣機(jī)作為被控制對(duì)象,需要從Matlab中獲得驅(qū)動(dòng)數(shù)據(jù)。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
魯渝能源四足機(jī)器人無(wú)線(xiàn)充電方案,量身定制,告別“趴窩”焦慮 
這不僅打斷了任務(wù)的連續(xù)性,更成為制約四足機(jī)器人走向完全自主化的最后一道枷鎖。 四足機(jī)器人的三大“充電之痛”與傳統(tǒng)輪式AGV不同,四足機(jī)器人工作環(huán)境更為復(fù)雜、作業(yè)方式更為離散,這讓它的充電問(wèn)題遠(yuǎn)比想象中棘手。 痛點(diǎn)一:人工干預(yù)與“無(wú)人化”目標(biāo)的根本沖突四足機(jī)器人最大的價(jià)值,在于替代人類(lèi)進(jìn)入危險(xiǎn)、偏遠(yuǎn)或不宜長(zhǎng)期停留的區(qū)域。
743
魯渝能源無(wú)線(xiàn)充電 ??? 18天前
《基于 RecurDyn 的四履帶足機(jī)器人運(yùn)動(dòng)學(xué)仿真》現(xiàn)已開(kāi)放領(lǐng)取 
摘要: 應(yīng)用多體動(dòng)力學(xué)仿真分析軟件 RecurDyn 對(duì)四履帶足機(jī)器人進(jìn)行全三維建模及越障過(guò)程仿真,并分析了履帶機(jī)器人行走過(guò) 程 中 的 力 學(xué) 模 型,仿真 結(jié) 果 動(dòng) 態(tài),準(zhǔn)確的反映了四履帶足機(jī)器人行走機(jī)構(gòu)的越障過(guò)程,驗(yàn)證了四履帶足機(jī)器人行走機(jī)構(gòu)較之雙履帶結(jié)構(gòu)形式出色的越障能力,體現(xiàn) 了 RecurDyn 軟件在履帶機(jī)器人的動(dòng)力學(xué)仿真分析方面的有效性和優(yōu)越性 。1. 引言2.
2554
上海安世亞太 ??? 2年前
小米×DKE東方科脈聯(lián)合推出四足仿生機(jī)器人電致變色版CyberDog2 
本次發(fā)布會(huì)新品齊聚,全新仿生四足機(jī)器人CyberDog2作為發(fā)布會(huì)“One more thing”驚喜登場(chǎng),CyberDog2電致變色版更是獲得了大量的關(guān)注。全新發(fā)布的CyberDog2在繼承前代產(chǎn)品優(yōu)勢(shì)的基礎(chǔ)上,進(jìn)行了全面的技術(shù)升級(jí),更智能、更仿生。
1277
東方科脈電子紙專(zhuān)業(yè)制造商 ??? 10月前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
關(guān)鍵詞 Adams 六足步行機(jī)器人 四連桿機(jī)構(gòu) 運(yùn)動(dòng)學(xué)分析0 引言曲柄連桿機(jī)構(gòu)是連桿足式步行機(jī)器人的核心機(jī)構(gòu),是實(shí)現(xiàn)步行腿行走的關(guān)鍵零部件[1]。步行機(jī)構(gòu)曲柄連桿的方案設(shè)計(jì)及其運(yùn)動(dòng)特性是影響機(jī)器人行走和運(yùn)動(dòng)動(dòng)作的重要因素[2]。
4190 7 8
仿真客 ??? 3年前
設(shè)計(jì)仿真 | AI+仿真雙驅(qū)動(dòng)!海克斯康領(lǐng)跑人形機(jī)器人研發(fā) 
真實(shí)案例見(jiàn)證海克斯康工業(yè)仿真軟件的強(qiáng)大實(shí)力海克斯康工業(yè)仿真軟件在人形機(jī)器人研發(fā)領(lǐng)域的應(yīng)用已經(jīng)取得了顯著的成果。例如,在大型四足機(jī)器人的步態(tài)仿真中,Adams軟件通過(guò)精確的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,幫助研發(fā)人員優(yōu)化了機(jī)器人的步態(tài)周期、單腿步距等關(guān)鍵參數(shù),實(shí)現(xiàn)了穩(wěn)定的步行。
3242 1 1
海克斯康設(shè)計(jì)與仿真 ??? 1年前
蛇形坦克機(jī)器人設(shè)計(jì)蛇形坦克機(jī)器人設(shè)計(jì) 
蛇形坦克機(jī)器人設(shè)計(jì) 本項(xiàng)目展示了一種模塊化救援機(jī)器人的機(jī)械設(shè)計(jì),該機(jī)器人專(zhuān)為地震后搜救任務(wù)而開(kāi)發(fā)。該機(jī)器人將蛇形柔性車(chē)身與履帶式(類(lèi)似坦克)移動(dòng)系統(tǒng)相結(jié)合,能夠在狹窄、充滿(mǎn)碎石的空間中穿行。它能夠越過(guò)高達(dá) 30 厘米的障礙物,并傳輸實(shí)時(shí)熱成像和視頻數(shù)據(jù)以支持救援隊(duì)。
1158
仿真資料吧 ??? 11月前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
▎解決方案 ?借助逆向動(dòng)力學(xué)預(yù)測(cè)并確認(rèn)機(jī)器人的運(yùn)動(dòng)范圍?通過(guò)RecurDyn模型獲得設(shè)計(jì)所需的數(shù)據(jù),如扭矩和剛度?利用RecurDynMFBD技術(shù)準(zhǔn)確預(yù)測(cè)機(jī)器人的振動(dòng)特性?基于RecurDyn模型代替物理樣機(jī)設(shè)計(jì)控制器 ▎結(jié)論 ?利用虛擬模型快速設(shè)計(jì)控制器,無(wú)需借助物理樣機(jī)即可控制機(jī)器人的行為
2610 1 1
杭州擬創(chuàng)(RecurDyn原廠(chǎng)) ??? 3年前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
▎解決方案 ?借助逆向動(dòng)力學(xué)預(yù)測(cè)并確認(rèn)機(jī)器人的運(yùn)動(dòng)范圍?通過(guò)RecurDyn模型獲得設(shè)計(jì)所需的數(shù)據(jù),如扭矩和剛度?利用RecurDynMFBD技術(shù)準(zhǔn)確預(yù)測(cè)機(jī)器人的振動(dòng)特性?基于RecurDyn模型代替物理樣機(jī)設(shè)計(jì)控制器 ▎結(jié)論 ?利用虛擬模型快速設(shè)計(jì)控制器,無(wú)需借助物理樣機(jī)即可控制機(jī)器人的行為
2529
杭州擬創(chuàng)(RecurDyn原廠(chǎng)) ??? 2年前
從"流浪地球"到ChatGPT,頂流機(jī)器人設(shè)計(jì)需要哪些仿真技術(shù)? 
為了讓機(jī)器人的工作表現(xiàn)達(dá)到預(yù)期目標(biāo),在設(shè)計(jì)階段就需要建立機(jī)器人的多體動(dòng)力學(xué)數(shù)字樣機(jī),來(lái)評(píng)估機(jī)器人的動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)特性。對(duì)于機(jī)器人整體,可以評(píng)估不同的控制策略;對(duì)于關(guān)鍵的承力部件,可以結(jié)合有限元仿真軟件完成剛-柔耦合分析。甚至還可以做一些拓?fù)鋬?yōu)化,讓機(jī)器手臂的樣子更具未來(lái)感。 3、多體動(dòng)力學(xué)仿真在機(jī)器人設(shè)計(jì)中起什么作用?
2114
安世亞太 ??? 3年前
人形機(jī)器人關(guān)節(jié)電機(jī)設(shè)計(jì)“寶典” 
宇樹(shù)A1機(jī)器人關(guān)節(jié)電機(jī)簡(jiǎn)介(本圖來(lái)源于宇樹(shù)官網(wǎng)) 宇樹(shù)A1機(jī)器人關(guān)節(jié)電機(jī)是一款高性能電機(jī),專(zhuān)為智能機(jī)器人設(shè)計(jì),主要用于關(guān)節(jié)和機(jī)械臂。它配備高精度編碼器,支持精確角度控制和流暢運(yùn)動(dòng),具備高扭矩輸出,適應(yīng)復(fù)雜操作。
9972
杭州麥科斯韋 ??? 1年前
清潔機(jī)器人底殼注射模具設(shè)計(jì)+3d 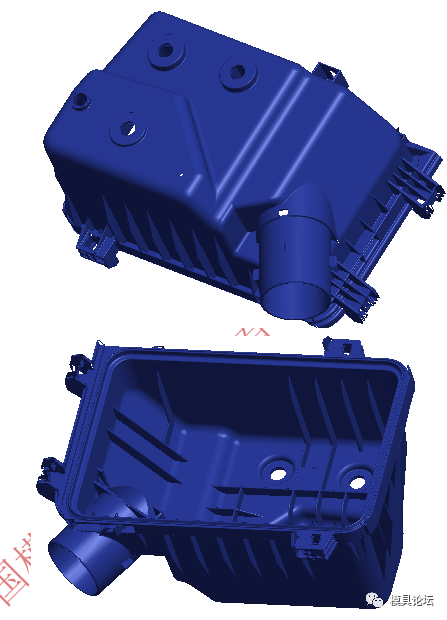
圖1清潔機(jī)器人底殼產(chǎn)品圖從圖1可以看出, 塑件為近似為矩形的封閉殼體,殼體邊緣有3處小的功能性結(jié)構(gòu)需要設(shè)計(jì)滑塊抽芯,塑件一個(gè)角部有一處斜向的圓筒,需要設(shè)計(jì)滑塊抽芯,斜向圓筒的外形同樣需要設(shè)計(jì)滑塊抽芯。塑件頂面有局部凸起,有4處凸臺(tái)并有圓孔。塑件邊緣和內(nèi)部有多條加強(qiáng)筋。塑件尺寸較大,模具結(jié)構(gòu)復(fù)雜,外形有多處滑塊抽芯,模具設(shè)計(jì)型腔排位為1出1.模具設(shè)計(jì)排位圖見(jiàn)圖2所示。
2322
模具論壇 ??? 3年前
2024年RecurDyn優(yōu)秀案例競(jìng)賽作品分享:核探測(cè)機(jī)器人底盤(pán)設(shè)計(jì)與越障性能仿真驗(yàn)證 
四、結(jié)論 通過(guò)對(duì)機(jī)器人虛擬樣機(jī)模型的建立并施加相應(yīng)的約束、接觸與驅(qū)動(dòng),對(duì)機(jī)器人進(jìn)行了動(dòng)力學(xué)仿真分析,仿真分析結(jié)果驗(yàn)證了機(jī)器人整體結(jié)構(gòu)設(shè)計(jì)的合理性以及底盤(pán)運(yùn)動(dòng)的穩(wěn)定性,并對(duì)仿真結(jié)果與理論分析結(jié)果之間存在偏差的數(shù)據(jù)進(jìn)行了詳細(xì)分析,通過(guò)對(duì)本章的動(dòng)力學(xué)仿真分析進(jìn)一步保證了機(jī)器人在工作中的穩(wěn)定性,為實(shí)驗(yàn)樣機(jī)的研制奠定了理論基礎(chǔ)。作者:胡俊濤
2557
杭州擬創(chuàng)(RecurDyn原廠(chǎng)) ??? 1年前
RecurDyn經(jīng)典案例:象鼻機(jī)器人機(jī)械臂的優(yōu)化設(shè)計(jì) 
象鼻機(jī)器人是一種模仿象鼻行為的具有無(wú)限自由度的機(jī)械手臂,目前正在研發(fā)中。這種機(jī)械臂機(jī)器人是由一組圓盤(pán),通過(guò)中心連接到一個(gè)柔性軸上,由一組穿過(guò)圓盤(pán)的電纜控制。電纜的末端直接連接到電機(jī)上。手臂具有連續(xù)運(yùn)動(dòng),可針對(duì)特定的應(yīng)用場(chǎng)景進(jìn)行定制,例如,探查危險(xiǎn)區(qū)域。為了優(yōu)化這種柔性機(jī)械臂的設(shè)計(jì),需要研究幾個(gè)參數(shù):纜繩張力、纜繩末端隨時(shí)間變化的力、驅(qū)動(dòng)機(jī)構(gòu)所需的力、機(jī)器人的工作體積。
3369
杭州擬創(chuàng)(RecurDyn原廠(chǎng)) ??? 4年前
工業(yè)機(jī)器人本體結(jié)構(gòu)設(shè)計(jì) 

工業(yè)機(jī)器人常用結(jié)構(gòu)及對(duì)比4. 工業(yè)機(jī)器人設(shè)計(jì)難點(diǎn)
3767 1 1
錦衣夜行 ??? 4年前
六足機(jī)器人的Workbench動(dòng)力學(xué)仿真,視頻免費(fèi)無(wú)聲音,操作細(xì)致,提供附件(需購(gòu)買(mǎi))練習(xí)。 
六足機(jī)器人的Workbench動(dòng)力學(xué)仿真,視頻免費(fèi)無(wú)聲音,操作細(xì)致,提供附件(需購(gòu)買(mǎi))練習(xí)。
469 1
兵荒馬亂 ??? 6年前
魯渝能源180W~6000W全功率機(jī)器狗無(wú)線(xiàn)充電方案 
在機(jī)器狗停靠機(jī)制層面,機(jī)器人自身特性加劇了困難。四足機(jī)器人在完成作業(yè)任務(wù)后自動(dòng)行走到充電區(qū)域時(shí),站立時(shí)存在自然的晃動(dòng)和姿態(tài)變化。機(jī)械臂或連桿式對(duì)接需要毫米級(jí)的重復(fù)定位精度,而四足機(jī)器人的機(jī)械結(jié)構(gòu)特性注定了它難以做到這一點(diǎn),對(duì)接失敗、充電中斷成為家常便飯。在運(yùn)維層面,目標(biāo)與手段的矛盾最為尖銳。
842
魯渝能源無(wú)線(xiàn)充電 ??? 12天前
移動(dòng)機(jī)器人的分類(lèi)及介紹
在一些特殊的服務(wù)場(chǎng)景中,如在高端酒店或科技館中,雙足機(jī)器人可以作為迎賓或展示機(jī)器人,以近似人類(lèi)的行走姿態(tài)和交互方式,迎接賓客或進(jìn)行科普展示,為人們帶來(lái)新奇的體驗(yàn)。 四足機(jī)器人:模仿動(dòng)物如狗的行走方式,四足機(jī)器人在復(fù)雜地形和環(huán)境中具有出色的表現(xiàn)。在野外探險(xiǎn)活動(dòng)中,四足機(jī)器人可以作為探險(xiǎn)隊(duì)的先鋒,攜帶探測(cè)設(shè)備進(jìn)入深山、峽谷等人類(lèi)難以到達(dá)的區(qū)域,進(jìn)行地形勘察、生物多樣性監(jiān)測(cè)等任務(wù)。
2754
探索者第2號(hào)前來(lái)報(bào)到 ??? 1年前
2026北京人工智能展會(huì):大模型賦能機(jī)器人,開(kāi)啟智能產(chǎn)業(yè)新周期 
,加速技術(shù)成果轉(zhuǎn)化;此外,機(jī)器人大賽、技術(shù)沙龍、企業(yè)新品發(fā)布會(huì)等活動(dòng)將同步開(kāi)展,其中機(jī)器人大賽將匯聚全球優(yōu)秀團(tuán)隊(duì),展示人形機(jī)器人、四足機(jī)器人的實(shí)操能力與創(chuàng)新設(shè)計(jì),直觀呈現(xiàn)具身智能的產(chǎn)業(yè)化潛力,為行業(yè)交流、技術(shù)碰撞、人才對(duì)接提供多元平臺(tái)。
1169
數(shù)字中國(guó)產(chǎn)業(yè)展會(huì) ??? 2月前
聚焦杭州|2026杭州國(guó)際人工智能與機(jī)器人展的硬核實(shí)力 
企業(yè)矩陣群星璀璨核心企業(yè)規(guī)模數(shù)據(jù)顯示,杭州目前已集聚機(jī)器人整機(jī)及零部件相關(guān)企業(yè)超過(guò)200家,全產(chǎn)業(yè)鏈相關(guān)企業(yè)突破700家,2025年具身智能機(jī)器人及其他智能終端產(chǎn)業(yè)集群實(shí)現(xiàn)規(guī)上工業(yè)總產(chǎn)值1068.3億元,擁有規(guī)上企業(yè)421家,在全國(guó)四足機(jī)器人、人形機(jī)器人市場(chǎng)的份額分別超過(guò)80%和50%,在運(yùn)動(dòng)控制等核心領(lǐng)域已形成領(lǐng)先優(yōu)勢(shì)。
831
數(shù)字中國(guó)產(chǎn)業(yè)展會(huì) ??? 8天前
20條/頁(yè) 
 126
126 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
