



淺談太空“機械臂” 
國際空間站上的機械臂抓取龍貨運飛船據美媒報道,美國正在推進的月球門戶站項目,加拿大將為它研制第三代機械臂——加拿大臂3。這種機械臂仍然包括大臂和機器手兩個部分,但應用了更先進的機器視覺、簡短的軟件和人工智能系統,可以在無需航天員遙控干預的情況下執行任務。
2120
機械設計師 ??? 4年前
傳統測試設備的局限與協作機械臂的破局 
二、 協作機械臂構成的核心測試單元與能力一個以協作機械臂為核心的智能測試系統,通常由以下幾部分構成:1.協作機械臂本體:作為執行機構,負責移動、定位和操作。2.多功能末端執行器:根據測試任務定制,如:3.仿形探針/測試頂針:用于精準接觸電路板測試點。4.氣動/電動夾爪:用于抓取產品、插拔連接器或模擬按鍵。5.力控傳感器:確保插拔、按壓動作的力度精確可控。
2819 1 1
德基西瓜 ??? 7月前
基于模仿學習和強化學習的機械臂運動技能獲取 
Kinect V2 作為視覺傳感器實現物體識別和定位,基于 MoveIt!運動規劃軟件實現高層動作規劃。將 RGB-D 圖像作為示教平臺,在圖像中與一個物體交互并選擇一個高階動作,引導機械臂在實際工作空間操作對應的物體,多步的交互組成了一項運動技能的示教軌跡。 圖1 RGB-D圖像交互示教 然后,開展了從示教中學習技能的研究。
3351
機械設計師 ??? 4年前
增強現實場景下基于穩態視覺誘發電位的機械臂控制系統 
3.2在線試驗 在線試驗要求受試者佩戴AR眼鏡,通過抓取黑色小球并將其放置在工作區域完成拼圖任務。在線試驗中沒有視覺提示,小球放置的位置并不固定,由受試者自行選擇。當受試者確定小球放置位置后,自行切換刺激界面,受試者選擇目標放置位置的坐標(行坐標和列坐標)。然后,機械臂到指定位置抓取小球,并將小球根據選擇結果移動到目標位置。
2576 1
機械設計師 ??? 4年前
北理工研制機械狗全地形自適應,無需額外視覺感知,可在復雜地形中如履平地 
▍實地遛‘狗’為了驗證機械狗的真實運動能力,研究人員進行了三個室外實驗,實地遛‘狗’ 機械狗分別上了斜坡、草地和巖石,并保持穩定的小跑步態,因為水平的 GRF 值很小,機械狗在斜坡上也沒有腳滑。 研究人員還給機械狗裝了一條機械臂,不過沒有用來抓取物體,只是作為質量干擾物來驗證機械狗的穩定運動能力。
3179
無人機10086 ??? 4年前
庫卡、ABB等12家機械臂3D打印解決方案 
他們求助于柯馬來滿足他們對機械臂的需求。 △帶有柯馬手臂的機器人 3D 打印機能夠使用連續碳纖維生產熱固性物體(照片來源:ContinuousComposites)
2979
南極熊3D打印 ??? 3年前
《基于 ABAQUS 的大跨距桁架不同截面模態分析和結構優化》 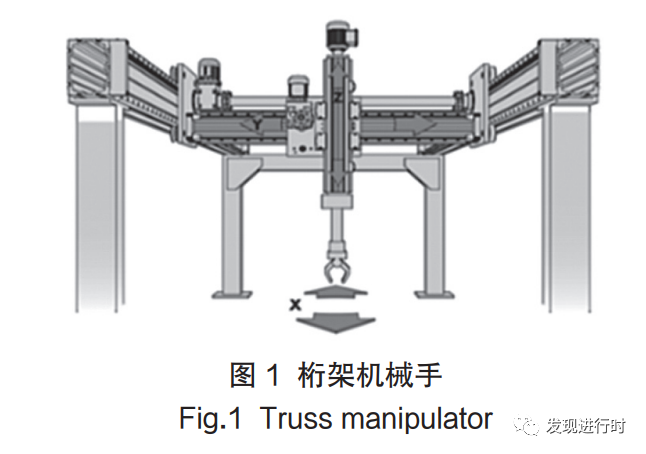
物體本身有固有頻率,設計時要使物體固有 頻率低于外界激振力的頻率,避免共振情況的發 生 [13-15]。大跨距桁架上機械手需要不停運動,進 行工件抓取,從而產生系統振動,分析低階模態 可以更有效地反映設備的振動情況,故本文模態 分析提取梁體的前 6 階。本次對 Y 軸縱梁模態分 析時,由于梁體是可以移動的,故將其簡化為簡支梁,在中點位置添加機械手自重受力約束。
3166 2
CAEer吳皓 ??? 2年前
半軸精車、鉆孔、孔倒角自動化設計 
自動線組成結構平衡吊及吊具 上料方式采用平衡吊,臂展半徑3200mm,前端夾具位置可直接與地面接觸。抓取料工裝為自行設計的手動夾具,夾具為折臂杠桿形式,抓取時采取雙手聯動方式。由于轉序半軸為瑪蓮朵擺放,桿與桿緊挨著,大多數沒有縫隙,夾具設計前端為尖角便于抓取工件。
2376
FMMM ??? 4年前
工業機器人與協作機器人概念不同 
在汽車生產中,用于車身焊接,面對復雜車身結構,機械臂可靈活抵達各部位,精準控制焊接電流與速度,焊縫質量出色,且焊接效率遠超人工,有力保障汽車生產的高效與高質量。在零部件組裝場景,搭載先進視覺識別系統的機械臂,能快速識別零件形狀、尺寸與位置,精準抓取并按嚴苛工藝要求組裝,像發動機組裝,確保每個零件裝配間隙誤差極小,提升產品可靠性與生產效率。
2339
德基西瓜 ??? 11月前
案例19 挖掘機臂裝配體的瞬態動力學分析 
然而在本分析中使用的是固定時間增量0.2s,從而在額外時間點的結果能夠被抓取,三個載荷步,每個載荷步持續10s,一共30s。默認數值阻尼0.1,采用HHT時間積分法。 結果和討論 ANSYS Workbench中的動畫展示了挖掘機臂裝配體的運動: 下圖顯示了在兩種瞬態分析情況下,框架相對于地面的轉動,可見在兩種情況下運動是相同的。
3342 8 1
龍飛宇 ??? 3年前
機械設計常用計算公式錦集 
則杠桿(搖桿)臂的慣量為:14)普通傳送輥的轉動慣量: 這是一個物體的直線運動傳送到旋轉的圓盤或輥的情況。適用于計算重力慣量或負載慣量折合到電機軸上的場合。例如傳送帶、絲杠上的負載重量等。 其傳遞的慣量為:15)輪盤: 它跟輥,導桿,齒輪,聯軸器,轉臺等都非常相似,輪盤其實就跟圓柱體沒多大區別,只是長度收縮了很多。
3641
工廠物流自動化 ??? 4年前
縮短40%遷移周期:如何構建具身智能高可靠驗證底座? 
2.1人形/機械臂等本體構型快速迭代修改關節自由度、傳感器布局后即時驗證效果,減少物理樣機改版次數。 2.2復雜任務策略部署在虛擬家庭、倉庫等非結構化場景中直觀評估作業效能,跨環境切換測試算法魯棒性。
710
康謀keymotek ??? 13天前
機械設計常用計算公式錦集 
則杠桿(搖桿)臂的慣量為:14)普通傳送輥的轉動慣量: 這是一個物體的直線運動傳送到旋轉的圓盤或輥的情況。適用于計算重力慣量或負載慣量折合到電機軸上的場合。例如傳送帶、絲杠上的負載重量等。其傳遞的慣量為:15)輪盤: 它跟輥,導桿,齒輪,聯軸器,轉臺等都非常相似,輪盤其實就跟圓柱體沒多大區別,只是長度收縮了很多。
3289 1
工廠物流自動化 ??? 4年前
慧通測控智能機器人進行的測試案例分享 
3、材料力學性能測試 拉伸測試:機械臂精準抓取和安裝拉伸試樣,嚴格按照標準精確控制拉伸速度,實時、準確地采集拉力、位移數據,進而計算出材料的彈性模量、抗拉強度、延伸率等關鍵指標,全面評估材料在拉伸狀態下的力學性能。
2289
德基西瓜 ??? 11月前
電動夾爪:工業自動化中的高效執行者 
當電機啟動時,輸出軸開始旋轉,夾持裝置在機械結構的作用下實現夾緊物體;當電機停止時,夾持裝置則通過機械結構的松開機構使物體松開。這種基于電動機和機械結構的相互作用,使電動夾爪能夠實現快速、準確的夾持和松開操作。
2466
MISUMI米 ??? 1年前
設計仿真 | Adams進行關鍵結構通用化設計的工程價值 
(THCM)是塔塔汽車公司和日本日立工程機械公司在印度的合資公司。
2654 1
海克斯康設計與仿真 ??? 2年前
協作機器人有哪些測試項目? 
電池包跌落測試:通過六軸機械臂實現電池組空間任意角度跌落測試,誤差控制在 ±0.5° 以內,可同步采集電芯內阻、電壓及溫度變化數據。三、材料力學性能測試 拉伸測試:機械臂在精確控制下抓取和安裝拉伸試樣,精準控制拉伸速度,實時采集拉力、位移數據,計算材料的彈性模量、抗拉強度、延伸率等關鍵指標。
2353
德基西瓜 ??? 11月前
靈巧手CNC機加工:人形機器人具身智能的關鍵零部件制造方案 
它不僅僅是一個抓取工具,更是人形機器人實現與真實世界高效交互的關鍵。一、靈巧手與人形機器人發展的緊密關系靈巧手是指具備高自由度(Degrees of Freedom, DOF)的末端執行器,能夠完成精細的操作,例如抓取易碎物體、進行復雜的裝配動作,甚至模擬人類手部的靈活性。相比傳統的機械夾爪,全驅動靈巧手在關節控制、抓取方式和反饋機制上更接近人類手掌。
2631
2103707493 ??? 9月前
RecurDyn機器人仿真應用及核心技術路線詳解 
</p><p><strong>【建模流程及原理】</strong></p><p><strong>Step1 抓取動作模擬(OnOff Joint)</strong>:通過創建開關副(OnOff Joint),定義機器人工作過程中的離散動作(如抓取、放置),并設定其觸發條件,例如:當仿真時間未達到設定值時,機械手與物體無約束;達到時間后,自動鎖定兩者之間的6個自由度,實現“抓取”動作。
2383 1
杭州擬創(RecurDyn原廠) ??? 4月前
傳感器技術如何改變機器人世界 
操縱和抓握 對于許多工業機器人和協作機器人來說,精確操縱物體是一項關鍵技能。集成的力傳感器使機器人能夠以毫米級的精度抓取和操控物品,最大限度地降低損壞產品的風險。在工業環境中,這些傳感器可確保生產過程的高效和安全。通過測量關節上的扭矩和力,或直接測量撓性板上的扭矩和力,傳感器可以提高安全性,并將系統轉變為一個具有持續反饋功能的智能系統。
2961 1 1
HBK測試與測量 ??? 7月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
