



Speos Texture可視化紋理提升視覺(jué)感知 
Texture Mapping紋理映射是一個(gè)允許模擬材質(zhì)紋理來(lái)提高真實(shí)感的過(guò)程,紋理映射可以應(yīng)用在表面或是物體的外表面幾何組上,紋理映射允許在模擬中調(diào)用真是光學(xué)屬性文件表述光在材料表面的行為,在Speos中可以從任何圖像、bump圖像或光學(xué)屬性創(chuàng)建紋理映射,并提供堆疊和混合光學(xué)屬性(如絲網(wǎng)印刷、拉絲金屬、復(fù)合材料、光柵),通過(guò)紋理映射可以提高可視化。
2332
Ansys中國(guó) ??? 3年前
Ansys Speos 2023 R1新功能 | Texture可視化紋理提升視覺(jué)感知 
3.在新版本2023R1中,允許應(yīng)用紋理映射預(yù)覽功能,在編輯UV映射屬性時(shí)立即訪問(wèn)幾何紋理預(yù)覽,通過(guò)這種方式,可以不通過(guò)仿真立刻就會(huì)得到一個(gè)有映射的動(dòng)態(tài)紋理預(yù)覽,并了解紋理材料是否定義良好,旋轉(zhuǎn)角度是否合適,紋理大小是否滿足視覺(jué)需求。在設(shè)置紋理參數(shù)時(shí),查看幾何圖形上的紋理大小,紋理的預(yù)覽同時(shí)對(duì)應(yīng)于仿真模擬運(yùn)算結(jié)果和實(shí)時(shí)預(yù)覽preview結(jié)果。
2157 1 2
宇熠科技 ??? 3年前
車企用Abaqus、CATIA和Isight加速汽車設(shè)計(jì) 
福特的CATIA啟動(dòng)含有一套經(jīng)定制的外部產(chǎn)品管理系統(tǒng),在 CATIA界面初始化之前通過(guò)腳本剝離產(chǎn)品管理系統(tǒng)連接。設(shè)計(jì)參數(shù)隨后通過(guò)外部Excel文件輸入CATIA,這屬于 CATIA中更新設(shè)計(jì)表的常用方法。Excel文件的輸入?yún)?數(shù)映射到Isight管理器的DOE任務(wù),這支持每個(gè)回路的 Excel工作表自動(dòng)更新。由于Excel同步于設(shè)計(jì)表,因此 能自動(dòng)更新CATIA中的CAD幾何模型。
2517 3 1
迅利科技 ??? 2年前
基于BIM+GIS技術(shù)的高鐵動(dòng)車運(yùn)用所數(shù)字孿生關(guān)鍵技術(shù)研究 
通過(guò)上述過(guò)程制作完成的位移類、轉(zhuǎn)動(dòng)類、紋理替換類和骨骼類動(dòng)作模型,既包含模型靜態(tài)幾何和屬性信息,也包含模型的實(shí)時(shí)動(dòng)作和動(dòng)態(tài)屬性信息,可以真實(shí)反映相應(yīng)物理實(shí)體的狀態(tài)特性,即為數(shù)字孿生模型。位移類、轉(zhuǎn)動(dòng)類、紋理替換類和骨骼類動(dòng)作模型典型示例如圖5所示。
3067
學(xué)長(zhǎng)施工日志 ??? 3年前
高性能計(jì)算:仿真工業(yè)軟件底層技術(shù)剖析 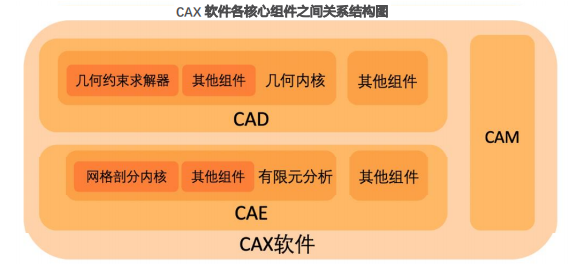
主流的有限元生成方法目前主流的有限元網(wǎng)格生成方法包括映射法、基于柵格法、幾何分解法、拓?fù)浞纸夥ā⒐?jié)點(diǎn)連接法五種。目前,正在研究的網(wǎng)格生成方法主要是這幾種方法的混合使用及現(xiàn)代技術(shù)的綜合應(yīng)用。映射法:基本原理為先通過(guò)適當(dāng)?shù)?em>映射函數(shù)將待剖分物理域映射到參數(shù)空間中形成規(guī)則參數(shù)域,對(duì)規(guī)則參數(shù)域進(jìn)行網(wǎng)格剖分;再將參數(shù)域的網(wǎng)格反向映射回物理空間,從而得到物理域的有限元網(wǎng)格。
3469 11 5
牛頓家的計(jì)算機(jī) ??? 3年前
Ansys Speos | 聯(lián)合 optiSLang 背光板設(shè)計(jì)優(yōu)化方案 
敏感度分析和優(yōu)化創(chuàng)建這個(gè)映射文件的不同,以改變紋理模式。每次計(jì)算帶有3DTexture的模擬時(shí),都會(huì)創(chuàng)建一個(gè)擴(kuò)展名為“.bin”的文件。必須讓該文件在作業(yè)啟動(dòng)時(shí)自動(dòng)寫入,而不是手動(dòng)寫入。否則,模式將不會(huì)從一個(gè)迭代更改到下一個(gè)迭代。
2394
宇熠科技 ??? 3年前
自動(dòng)駕駛行業(yè)觀察 | 自動(dòng)駕駛多模態(tài)融合感知詳解(研究現(xiàn)狀及挑戰(zhàn)) 
通常,降維操作的投影不可避免地會(huì)導(dǎo)致大量信息丟失,例如將 3D LiDAR 點(diǎn)云映射到BEV 圖像中。因此,通過(guò)將兩種模態(tài)數(shù)據(jù)映射為另一種專為融合而設(shè)計(jì)的高維表示,未來(lái)的工作可以有效地利用原始數(shù)據(jù),同時(shí)減少信息丟失。更合理的融合操作當(dāng)前的研究工作使用直觀的方法來(lái)融合跨模態(tài)數(shù)據(jù),例如連接和元素乘法。這些簡(jiǎn)單的操作可能無(wú)法融合分布差異較大的數(shù)據(jù),因此難以彌合兩種模態(tài)之間的語(yǔ)義差距。
2538
駕駛哥 ??? 3年前
自動(dòng)駕駛多模態(tài)融合感知詳解(研究現(xiàn)狀及挑戰(zhàn)) 
通常,降維操作的投影不可避免地會(huì)導(dǎo)致大量信息丟失,例如將 3D LiDAR 點(diǎn)云映射到BEV 圖像中。因此,通過(guò)將兩種模態(tài)數(shù)據(jù)映射為另一種專為融合而設(shè)計(jì)的高維表示,未來(lái)的工作可以有效地利用原始數(shù)據(jù),同時(shí)減少信息丟失。更合理的融合操作當(dāng)前的研究工作使用直觀的方法來(lái)融合跨模態(tài)數(shù)據(jù),例如連接和元素乘法。
2814
駕駛哥 ??? 3年前
康謀技術(shù) | 多傳感器數(shù)據(jù)融合技術(shù)與策略解析 
面對(duì)復(fù)雜的感知任務(wù),單一傳感器的局限性逐漸顯現(xiàn),比如相機(jī)對(duì)目標(biāo)的顏色和紋理比較敏感,但易受光照、天氣條件的影響。LiDAR以獲得目標(biāo)精確的3D信息,但無(wú)法獲得目標(biāo)紋理,易產(chǎn)生噪點(diǎn)等情況。多傳感器數(shù)據(jù)融合技術(shù)應(yīng)時(shí)而生,通過(guò)整合不同傳感器的優(yōu)勢(shì),為車輛提供了一個(gè)全面、立體的感知維度。一、多傳感器融合的先決條件當(dāng)多種傳感器裝在同一輛車上時(shí),使用同一個(gè)系統(tǒng)來(lái)采集并處理數(shù)據(jù)。
2302
康謀keymotek ??? 1年前
Speos案例 | 基于Speos的衍射波導(dǎo)AR風(fēng)擋HUD系統(tǒng)仿真解決方案 
4.3 光柵材料與UV映射配置 自定義光學(xué)材料:分別創(chuàng)建輸入、輸出耦合光柵專用材料,綁定光柵插件文件與參數(shù)文件,配置紋理貼圖基礎(chǔ)參數(shù); UV映射定向:新建UV映射坐標(biāo)系,精準(zhǔn)匹配光柵排布方向,確保衍射光路傳播角度符合設(shè)計(jì)值; 漸變效率優(yōu)化:在輸出耦合面添加漸變蒙版紋理,通過(guò)梯度亮度調(diào)節(jié),提升AR HUD全屏成像亮度均勻性;圖4:波導(dǎo)光柵屬性配置界面4.4
86
摩爾芯創(chuàng) ??? 昨天
如何閉環(huán)自動(dòng)駕駛仿真場(chǎng)景,實(shí)現(xiàn)從“重建”到“可用”? 
通過(guò)約束交叉注意力提取局部特征,校驗(yàn)場(chǎng)景中紋理、邊界、語(yǔ)義區(qū)域的還原度,確保虛擬場(chǎng)景與真實(shí)環(huán)境在視覺(jué)細(xì)節(jié)與語(yǔ)義理解上高度匹配。其中綠色區(qū)域代表兩種模型都檢測(cè)出的“car”類別區(qū)域,藍(lán)色區(qū)域代表僅公開(kāi)模型檢測(cè)出的“car”類別區(qū)域,黃色區(qū)域代表僅aiSim模型檢測(cè)出的“car”類別區(qū)域。
2242
康謀keymotek ??? 6月前
AI讀心重磅突破登Nature!大腦信號(hào)1秒被看穿,還能預(yù)測(cè)未來(lái)畫面 
它使研究人員能夠同時(shí)考慮神經(jīng)數(shù)據(jù)和行為標(biāo)簽,包括運(yùn)動(dòng),抽象標(biāo)簽(如獎(jiǎng)勵(lì)),或感官特征(如圖像顏色或紋理)。老鼠「讀腦術(shù)」怎樣將小鼠腦中的畫面重現(xiàn)呢?研究者召集了50只小鼠,讓它們一起觀看一段30秒的電影片段,并將這個(gè)過(guò)程重復(fù)了9次。在小鼠看電影時(shí),研究者就會(huì)把探針插進(jìn)小鼠的大腦視覺(jué)皮層區(qū)域,收集它們的神經(jīng)元活動(dòng)信號(hào)。
2190 2
牛頓家的計(jì)算機(jī) ??? 3年前
康謀分享 | 自動(dòng)駕駛仿真進(jìn)入“標(biāo)準(zhǔn)時(shí)代”:aiSim全面對(duì)接ASAM OpenX 
用戶導(dǎo)入地圖時(shí)可啟用“應(yīng)用 CRG 元素”選項(xiàng),自動(dòng)映射高程信息。b. 支持設(shè)置橫縱向最小增量值,控制網(wǎng)格精度,最小支持毫米級(jí),顯著提升仿真保真度。精準(zhǔn)路面建模,進(jìn)一步增強(qiáng)地形還原與物理行為一致性。
2421
康謀keymotek ??? 12月前
LITESTAR 4D:辦公室照明設(shè)計(jì) 
選擇“編輯材料 Edit Material”,接著“選擇紋理 Select Texture”,在文件夾中選擇“室內(nèi)木地板Indoor Floor Parquet”,再選擇合適的紋理。 選項(xiàng)卡中的部分,還可以用來(lái)調(diào)整反射率等信息(本例使用默認(rèn)參數(shù)),點(diǎn)擊OK完成地板參數(shù)調(diào)整。 同樣的方式,我們可以調(diào)整墻壁和天花板的參數(shù)。 5. 在墻上開(kāi)一個(gè)窗戶。
2201
信光嗎 ??? 6月前
Isight系列:如何使用isight使設(shè)計(jì)變得高效? 

;單步調(diào)試)第三講 工作流與數(shù)據(jù)映射(Sim-flow工作流; Loop循環(huán)控制; 條件控制;Isight database介紹; Database lookup的使用)第四講 Isight集成Hypermesh(Hypermesh命令流文件生成;Isight集成Hypermesh)第五講 Isight集成Abaqus(輸入?yún)?shù)讀取;運(yùn)行設(shè)置; 輸出參數(shù)讀取
8743 3 25
夢(mèng)溪 ??? 7年前
光學(xué) | Ansys Speos新版本助力提升仿真精度和速度 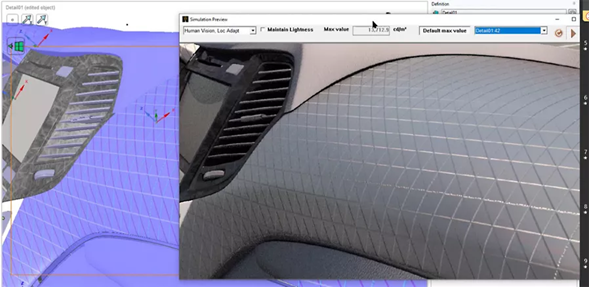
隨著Ansys Speos 2023 R1版本的發(fā)布,此次新版本有如下最新的改進(jìn): 紋理映射預(yù)覽工具增加了多層材料在光學(xué)設(shè)計(jì)中的使用。您可以堆疊和混合多種紋理光學(xué)屬性,如拉絲金屬、復(fù)合材料、絲網(wǎng)印刷和光柵,并輕松分析結(jié)果。您還可以編輯紋理定義,并立即查看所做的更改,這些更改將顯示在角度和屬性(ASP)幾何結(jié)構(gòu)上,并具有尺寸和方向的保真度。
2201
Ansys中國(guó) ??? 2年前
SOLIDWORKS 2024新功能 TOP系列之 - 3D CAD三維機(jī)械設(shè)計(jì)10大新功能 
? 調(diào)整參數(shù)的紋理和紋理映射,以獲得更優(yōu)的掌控度和保真度。? 將法線貼圖和位移圖相結(jié)合,并應(yīng)用向量位移。優(yōu)點(diǎn):體驗(yàn)更輕松的優(yōu)化和更高級(jí)的實(shí)時(shí)渲染。
2725
SOLIDWORKS碩迪科技 ??? 2年前
基于深度學(xué)習(xí)的超分辨率圖像技術(shù)一覽 
無(wú)監(jiān)督SR的另一種方法是將LR空間和HR空間視為兩個(gè)域,并使用周期循環(huán)結(jié)構(gòu)學(xué)習(xí)彼此之間的映射。這種情況下,訓(xùn)練目的包括推送映射結(jié)果去匹配目標(biāo)的域分布,并通過(guò)來(lái)回(round trip)映射使圖像恢復(fù)。 ? 深度圖像先驗(yàn)知識(shí) CNN結(jié)構(gòu)在逆問(wèn)題之前捕獲大量的低級(jí)圖像統(tǒng)計(jì)量,所以在執(zhí)行SR之前可使用隨機(jī)初始化的CNN作為手工先驗(yàn)知識(shí)。
2442
駕駛哥 ??? 4年前
【ENOVIA】xCAD協(xié)同數(shù)據(jù)管理-Inventor | 達(dá)索系統(tǒng)百世慧? 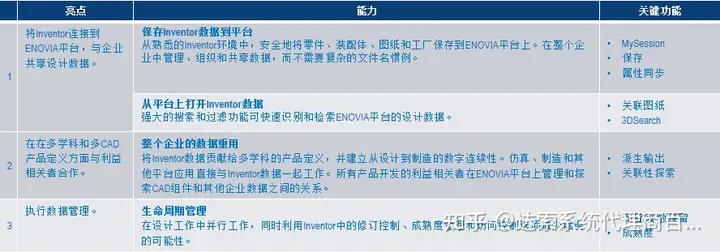
在保存到ENOVIA時(shí),該映射將被遵守,Inventor文件中的相應(yīng)屬性值將被復(fù)制到ENOVIA對(duì)象中。從ENOVIA打開(kāi)時(shí),也將遵守這一映射,ENOVIA對(duì)象的相應(yīng)屬性值將被復(fù)制到Inventor文件。從平臺(tái)上打開(kāi)Inventor數(shù)據(jù)相關(guān)圖紙將所有相關(guān)設(shè)計(jì)下載到選定的模型中文件的副本存放在用戶指定的本地工作目錄中。
2030
達(dá)索系統(tǒng)百世慧 ??? 3年前
Fidelity Pointwise補(bǔ)救措施處理解析和離散幾何類型的缺點(diǎn) 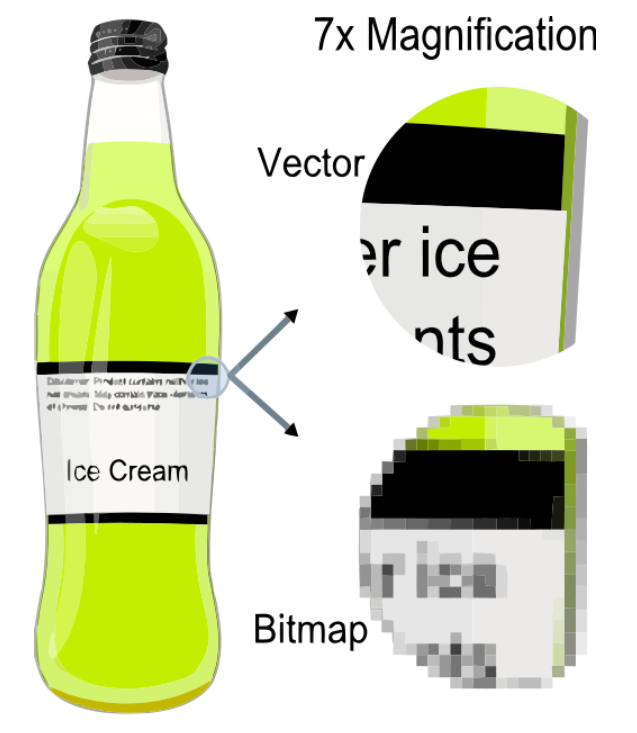
使用許多常見(jiàn)的 CAD 格式導(dǎo)入解析幾何,例如 IGES、STEP、Parasolid、ACIS、CATIA V4/V5、Pro/Engineer、NX 和 SolidWorks。同時(shí),離散幾何體是使用 STL 和 VRML 格式以及一些其他網(wǎng)格格式導(dǎo)入的。Fidelity Pointwise 網(wǎng)格劃分軟件提供的工具可以幫助彌補(bǔ)使用兩種幾何類型的缺點(diǎn)。
2593
Fidelity CFD ??? 2年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
