



2024年RecurDyn優秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
通過理論分析,確定了移動底盤相關參數并通過三維繪圖軟件SolidWorks建立了機器人三維模型,利用動力學仿真軟件RecurDyn對機器人底盤越障能力進行了仿真分析,得出了機器人在越障過程中其質心與驅動扭矩的變化關系,驗證了底盤越障可靠性,為實驗樣機的研制奠定了理論基礎。
2554
杭州擬創(RecurDyn原廠) ??? 1年前
履帶建模常見問題及解決方法-履帶穿透、脫軌、彈飛問題 
履帶越障的時候出現Out of range報錯,是什么原因?答案:同時Out of range一般是齒輪發生了穿透報錯,檢查齒輪初始位置是否和履帶發生了干涉。4. 履帶建模爬樓梯會斷裂是什么原因?答案:越障模型,在建立障礙的時候,不能存在90度的直角路面,否則會運算失敗;此外還需要注意履帶和地面之間的接觸參數,小尺寸模型可以調小剛度。
2579
杭州擬創(RecurDyn原廠) ??? 2年前
《基于 RecurDyn 的四履帶足機器人運動學仿真》現已開放領取 
摘要: 應用多體動力學仿真分析軟件 RecurDyn 對四履帶足機器人進行全三維建模及越障過程仿真,并分析了履帶機器人行走過 程 中 的 力 學 模 型,仿真 結 果 動 態,準確的反映了四履帶足機器人行走機構的越障過程,驗證了四履帶足機器人行走機構較之雙履帶結構形式出色的越障能力,體現 了 RecurDyn 軟件在履帶機器人的動力學仿真分析方面的有效性和優越性 。1. 引言2.
2553
上海安世亞太 ??? 2年前
履帶建模常見問題及解決方法-履帶翹頭、懸浮、偏軌問題 
履帶和地面之間有段空隙,無法落到地面,是什么原因呢?答案:在修改了履帶鏈節的齒形后,沒有重新定義Shoe Point的話就會出現這樣的問題,因為Shoe Point是定義與硬質地面相互作用的點,如果保持原先的設置,在仿真計算的時候就會以原先的齒形點進行計算,就會出現懸浮的錯誤。3. 履帶車輛越障時提前翹頭,是什么原因呢?
2372
杭州擬創(RecurDyn原廠) ??? 2年前
Recurdyn履帶問題 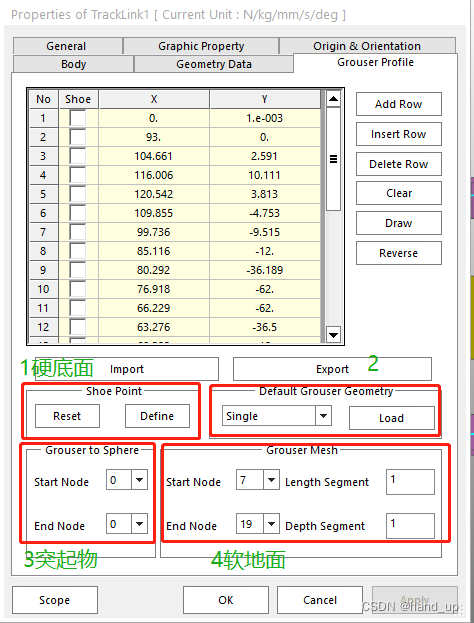
1.問題:整車履帶仿真出錯,車輛越障時遇到障礙物直接彈開思路:關于這類模型需要調節履帶和地面之間的接觸參數、Bushing force,還有驅動函數。
4235 3
CAE仿真學習菌 ??? 2年前
一體化ROS智能駕駛小車及實訓教學平臺解決方案 
="clear: both;"><p style="margin-top: 5px; margin-bottom: 15px; line-height: 1.6em;">制動方式:電動</p></li>
<li style="clear: both;"><p style="margin-top: 5px; margin-bottom: 15px; line-height: 1.6em;">越障高度
2766 1
康謀keymotek ??? 7月前
電動汽車BMS主要芯片及廠商分析 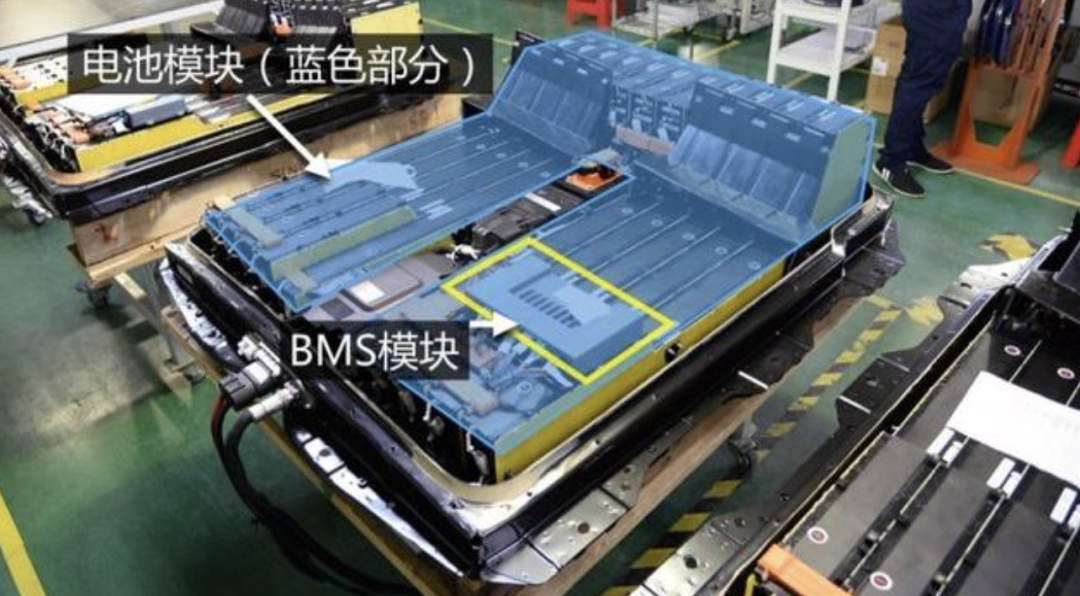
EVAL-L9963E-MCU隨著電動汽車變得越便宜,成本制約因素變得越重要。功能強大但價格太高的芯片會失去大部分吸引力。與眾不同的是,L9963E提供豐富的功能,但是沒有增加裸片尺寸,繼續保持成本效益。此外,傳統的 BMS芯片要求每個電池單體必須并聯一個外部齊納二極管。
2472
電子工程世界EEWorld ??? 3年前

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
