



跟我一起來(lái)認(rèn)識(shí)RecurDyn 附RecurDyn柔性體技術(shù)介紹下載 
RecurDyn產(chǎn)品線RecurDyn模塊豐富,大致可以分為RecurDyn/Professional,多學(xué)科集成模塊,行業(yè)專用工具包模塊,數(shù)據(jù)接口模塊及二次開(kāi)發(fā)平臺(tái)五部分。其中RecurDyn/Professional是RecurDyn的基礎(chǔ),包括前后處理器及求解器。
3507 1
huanggu4797 ??? 3年前
運(yùn)動(dòng)無(wú)處不在,RecurDyn與您永相伴 | RecurDyn V2023發(fā)布暨數(shù)字孿生的元模型技術(shù) 
RecurDynV2023版本新功能 博覽達(dá)技術(shù)專家焦曉娟博士表示相對(duì)于上一個(gè)版本,RecurDyn V2023版本根據(jù)各公司需求,整合新增了三十多個(gè)新功能,如單位制可以在建模之后改變、Relation Map的Filter功能、支持自定義快捷鍵、支持保持指定的視圖中心、圖形工作區(qū)可顯示Base與Action、組件元模型的計(jì)算、靜態(tài)求解器的增強(qiáng)等等。
2314
上海安世亞太 ??? 2年前
RecurDyn成功案例:在初期研發(fā)階段對(duì)不同斷路器產(chǎn)品概念進(jìn)行測(cè)試 
? 強(qiáng)大的軟件功能適用于多種領(lǐng)域及工況? 友好的用戶界面和快速求解器,有助于斷路器仿真? 支持使用柔性體進(jìn)行系統(tǒng)分析的多柔體動(dòng)力學(xué)技術(shù)(Multi Flexible Body Dynamics)▎工具包? RecurDyn/Professional? RecurDyn/FFlex▎工程問(wèn)題?
2275
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn V2023版本典型新功能 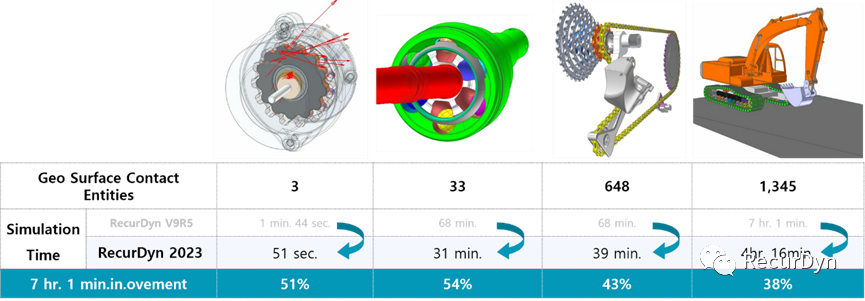
Solver Enhancement #2 Static Solver and FFlex Static Enhancements?歷時(shí)2年多的開(kāi)發(fā),采用新 N-R (Newton-Rasphon)靜態(tài)求解器,具有更高的精度和可靠性.?支持包含剛?cè)峤佑|的復(fù)雜MFBD模型的靜態(tài)求解.?通過(guò)事先計(jì)算車輛或挖機(jī)的初始靜平衡狀態(tài),有助于提高仿真速度和精度.
3586 1
仿真客 ??? 3年前
RecurDyn 應(yīng)用:基于多體動(dòng)力學(xué)的齒輪傳動(dòng)系統(tǒng)動(dòng)力學(xué)仿真 
KISSoft 模塊集成在此功能中,結(jié)合RecurDyn/DriveTrain和RecurDyn的柔性體功能,即使考慮殼體變形,也可以合理地模擬齒輪傳動(dòng)系統(tǒng)的運(yùn)動(dòng)行為。 下一部分,將介紹一個(gè)應(yīng)用案例“變速器系統(tǒng)的動(dòng)態(tài)仿真”。首先展示的是旋轉(zhuǎn)速度恒定的情況下摩托車變速器的仿真模型。
3872 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
2023新功能介紹 
模型中接觸力計(jì)算量大幅超過(guò)柔性體計(jì)算量的模型02Solver 功能升級(jí)#2:Static Solver強(qiáng)化及FFlex Static01升級(jí)內(nèi)容?經(jīng)過(guò)研發(fā)人員兩年多的優(yōu)化, N-R Static求解器性能大幅提升
3435
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:多體仿真優(yōu)化隔離開(kāi)關(guān) 
? 現(xiàn)存CAD軟件中的多體動(dòng)力學(xué)軟件無(wú)法解決此類問(wèn)題▎解決方案? 基于 RecurDyn 友善的 GUI 和子系統(tǒng)建模功能,可輕松建立系統(tǒng)虛擬化模型? 使用多個(gè)3D接觸,計(jì)算考慮接觸裝配間隙的系統(tǒng)性行為? Full Flex可重現(xiàn)板簧的精確行為? MFBD求解器可快速并穩(wěn)定地求解復(fù)雜系統(tǒng)的動(dòng)態(tài)行為▎結(jié)論
2389 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
Abaqus求解器類型應(yīng)該如何選擇 衡祖仿真 
總結(jié):Abaqus/Standard 求解器是一個(gè)強(qiáng)大的通用求解器,可用于從靜態(tài)問(wèn)題到動(dòng)態(tài)問(wèn)題的各種分析。而Abaqus/Explicit 求解器是一種更專業(yè)的工具,它特別適用于涉及復(fù)雜接觸的高度不連續(xù)的短期動(dòng)態(tài)非線性情況,也適用于涉及材料失效和結(jié)構(gòu)剛度突然變化的問(wèn)題。
3532
仿真驅(qū)動(dòng)設(shè)計(jì) ??? 3年前
RecurDyn機(jī)器人仿真應(yīng)用及核心技術(shù)路線詳解 
的逆運(yùn)動(dòng)學(xué)求解</strong></p><p><br></p><p>逆運(yùn)動(dòng)學(xué)(Inverse Kinematics,IK) 是機(jī)器人運(yùn)動(dòng)規(guī)劃中的核心問(wèn)題,其目標(biāo)是在已知機(jī)器人末端執(zhí)行器目標(biāo)位置(及姿態(tài))的前提下,反解出各關(guān)節(jié)所需達(dá)到的角度(或位移)。
2383 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
技術(shù)分享 | Simcenter 3D接觸粘接與解算方案 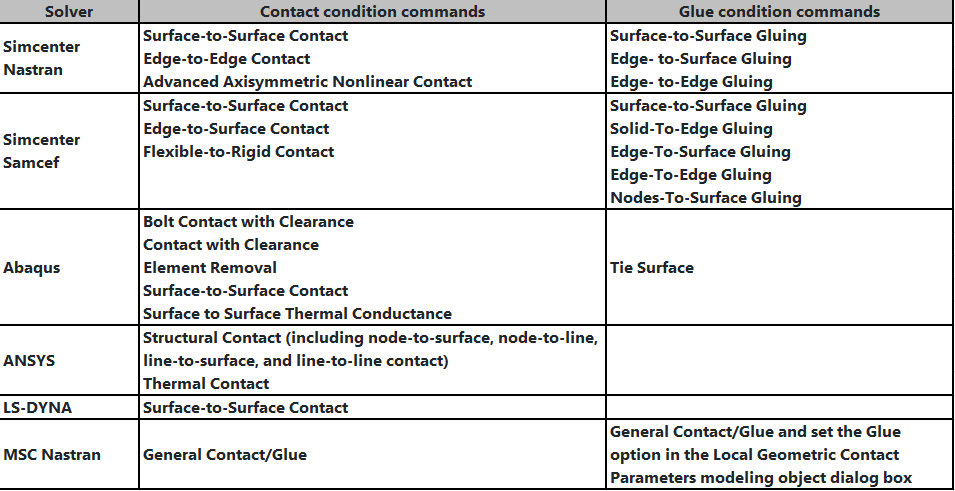
可用于定義接觸和膠合條件的命令取決于您指定的求解器。
2871 1
仿真客 ??? 3年前
RecurDyn成功案例:優(yōu)化扭矩扳手的設(shè)計(jì)和標(biāo)尺精度 
,其他零件用剛體建模② 定義接觸,包括柔性彈簧和銷的接觸③ 應(yīng)用各種尺寸和特性的彈簧進(jìn)行仿真④ 通過(guò)仿真,確定扭矩的大小,從而提高標(biāo)尺的精度▎關(guān)鍵仿真技術(shù)? MFBD 支持包括剛體和柔性體在內(nèi)的仿真? 考慮剛體和柔體之間的接觸? 便于修改彈簧截面直徑和物理特性進(jìn)行參數(shù)化建模? 可以準(zhǔn)確復(fù)現(xiàn)扭矩扳手非線性行為的多體動(dòng)力學(xué)求解器
2320 6 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:使用MFBD的雙桿拖拉機(jī)開(kāi)發(fā)ROPS虛擬試驗(yàn)方法 
在本例中,使用RecurDyn的基于Implicit Solver的MFBD相關(guān)組件實(shí)現(xiàn)了ROPS試驗(yàn)方法,并評(píng)估了與靜態(tài)非線性分析結(jié)果的誤差以及收斂性。
2008 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn V2023新版發(fā)布 ——軟件全方位優(yōu)化升級(jí) 

RecurDyn多年來(lái)持續(xù)進(jìn)行版本更新及新功能開(kāi)發(fā),RecurDyn2023版本作為繼V9R5之后推出的全新版本,該版本在之前的基礎(chǔ)上進(jìn)行了進(jìn)一步強(qiáng)化,更新增了眾多全新功能,包括基礎(chǔ)模塊professional,柔性體模塊MFBD, 求解器,界面,工具包等全方位優(yōu)化升級(jí),更有Data Driven Design數(shù)據(jù)驅(qū)動(dòng)設(shè)計(jì)、Linked Assembly等全新模塊!
1599
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
News ▎2023年RecurDyn用戶大會(huì) 
會(huì)議包括技術(shù)演講、技術(shù)展示、研討會(huì)等多個(gè)環(huán)節(jié),不僅邀請(qǐng)了眾多RecurDyn用戶,還邀請(qǐng)了相關(guān)領(lǐng)域?qū)<液彤a(chǎn)業(yè)鏈企業(yè)代表。 Functionbay 總部技術(shù)專家介紹了RecurDyn新V2024版本新功能,并介紹了新版本的求解器優(yōu)化和新功能的應(yīng)用領(lǐng)域使用方法。
2081
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:優(yōu)化扭矩扳手的設(shè)計(jì)和標(biāo)尺精度
,其他零件用剛體建模② 定義接觸,包括柔性彈簧和銷的接觸③ 應(yīng)用各種尺寸和特性的彈簧進(jìn)行仿真④ 通過(guò)仿真,確定扭矩的大小,從而提高標(biāo)尺的精度▎關(guān)鍵仿真技術(shù)? MFBD 支持包括剛體和柔性體在內(nèi)的仿真? 考慮剛體和柔體之間的接觸? 便于修改彈簧截面直徑和物理特性進(jìn)行參數(shù)化建模? 可以準(zhǔn)確復(fù)現(xiàn)扭矩扳手非線性行為的多體動(dòng)力學(xué)求解器
2152 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:提高鈑金加工產(chǎn)能和精度的虛擬樣機(jī)技術(shù) 
⑦ 后處理結(jié)果輸出并分析重要數(shù)據(jù) ▎關(guān)鍵仿真技術(shù)? MFBD技術(shù)可有效地考慮系統(tǒng)的彈性,精確計(jì)算出各部件的位置? 強(qiáng)大求解器即使基于一般性能計(jì)算機(jī)也可以輕松實(shí)現(xiàn)仿真目標(biāo) ▎工具包? RecurDyn/Professional? RecurDyn/RFlex(模態(tài)柔體)
2341 3
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:自行車鏈傳動(dòng)系統(tǒng)的自動(dòng)化建模與仿真 
在這種情況下,通過(guò)使用 RecurDyn 和 C# 編寫自動(dòng)化程序來(lái)解決這樣的問(wèn)題,可縮減仿真模型的求解時(shí)間。通過(guò)定制開(kāi)發(fā),可有效地對(duì)鏈節(jié)的各種形狀、鏈輪的安裝角度以及鏈輪和銷間的公差進(jìn)行建模、仿真和分析。
2583 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:使用MFBD的雙桿拖拉機(jī)開(kāi)發(fā)ROPS虛擬試驗(yàn)方法 
在本例中,使用RecurDyn的基于Implicit Solver的MFBD相關(guān)組件實(shí)現(xiàn)了ROPS試驗(yàn)方法,并評(píng)估了與靜態(tài)非線性分析結(jié)果的誤差以及收斂性。
2329
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
2023多體動(dòng)力學(xué)分析軟件合集 
05 RecurDyn RecurDyn (Recursive Dynamic)是由韓國(guó)FunctionBay公司開(kāi)發(fā)出的新一代多體系統(tǒng)動(dòng)力學(xué)仿真軟件。它采用相對(duì)坐標(biāo)系運(yùn)動(dòng)方程理論和完全遞歸算法,非常適合于求解大規(guī)模的多體系統(tǒng)動(dòng)力學(xué)問(wèn)題。
7580 5
CAE仿真學(xué)習(xí)菌 ??? 2年前
如何選擇合適的電磁場(chǎng)仿真算法 
ADS的Momentum和EMX均提供準(zhǔn)靜態(tài)選項(xiàng):在Momentum中,選擇RF模式即可選擇準(zhǔn)靜態(tài)模式; 在EMX中,仿真器會(huì)自動(dòng)判斷是否使用準(zhǔn)靜態(tài)模式,也可用“--quasistatic”命令強(qiáng)制選擇準(zhǔn)靜態(tài)模式。
3150 10 2
仿真客 ??? 3年前
20條/頁(yè) 
 16
16 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
