



復(fù)雜幾何體(齒輪箱吊座)六面體網(wǎng)格劃分步驟 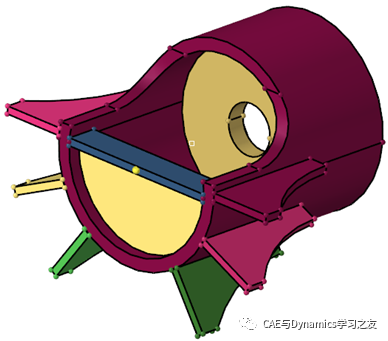
注意:一定要勾選“apply orthogonality to along”,否則不會(huì)與周邊網(wǎng)格節(jié)點(diǎn)對(duì)齊。最后使用Tool>edges命令來(lái)耦合節(jié)點(diǎn)。(5)通過(guò)solid map>one volume 逐個(gè)劃分其余體的3D網(wǎng)格,直至把這個(gè)“圓筒”部分劃完。(6)通過(guò)solid map>one volume 來(lái)劃分內(nèi)部結(jié)構(gòu),發(fā)現(xiàn)網(wǎng)格不對(duì)齊,刪除。
3185 3 1
我愛(ài)前處理 ??? 3年前
案例29-火箭噴管延伸模擬-運(yùn)行 
可以通過(guò)在/POST1中發(fā)出以下命令來(lái)生成: 也可以將層TEMP強(qiáng)制加到單元的8個(gè)角節(jié)點(diǎn)上,然后繪制單元解的輪廓(layer)。這樣可以確保繪制的單元解是圖中的實(shí)際層解。 要查看層熱通量和溫度梯度,請(qǐng)?jiān)趌ayer命令之后發(fā)出PLESOL命令。 默認(rèn)情況下,層值為0。這意味著后處理的數(shù)量是頂層的頂部和底層的底部。 下圖顯示了加強(qiáng)環(huán)四種分析的位移解。
2382
龍飛宇 ??? 3年前
技術(shù)分享 | 車載以太網(wǎng)gPTP時(shí)間同步:從協(xié)議到工程實(shí)踐 
=P2P:采用點(diǎn)對(duì)點(diǎn)延遲機(jī)制,減少多節(jié)點(diǎn)級(jí)聯(lián)的誤差累積。
2316
康謀keymotek ??? 9月前
智能數(shù)據(jù)建模軟件DTEmpower 新版本發(fā)布 
六、滑動(dòng)窗口升級(jí)為時(shí)滯輸入對(duì)齊節(jié)點(diǎn) “滑動(dòng)窗口節(jié)點(diǎn)”升級(jí)為“時(shí)滯輸入對(duì)齊節(jié)點(diǎn)”,更直觀反映節(jié)點(diǎn)功能和應(yīng)用場(chǎng)景。時(shí)滯輸入對(duì)齊節(jié)點(diǎn)允許用戶手動(dòng)設(shè)置時(shí)滯長(zhǎng)度,同時(shí)也支持在自動(dòng)模式下輸入變量,系統(tǒng)將通過(guò)內(nèi)置算法自動(dòng)計(jì)算最適合的時(shí)滯長(zhǎng)度。七、 數(shù)據(jù)分割節(jié)點(diǎn)改造對(duì)數(shù)據(jù)分割節(jié)點(diǎn),新增分層抽樣方法。
2304 1 1
天洑軟件 ??? 8月前
多晶塑性任意復(fù)雜網(wǎng)格周期性邊界的施加 
在很多工程實(shí)現(xiàn)里,周期性邊界常依賴“節(jié)點(diǎn)一一對(duì)應(yīng)”:要求相對(duì)兩邊(兩面)具有嚴(yán)格相同的網(wǎng)格拓?fù)渑c節(jié)點(diǎn)分布。為了滿足這一點(diǎn),建模時(shí)往往需要:在幾何上確保邊界嚴(yán)格對(duì)齊;在網(wǎng)格上強(qiáng)制生成周期匹配節(jié)點(diǎn);甚至為滿足配對(duì)而犧牲局部網(wǎng)格質(zhì)量。 對(duì)多晶模型而言,這帶來(lái)一個(gè)典型問(wèn)題:邊界鋸齒形。當(dāng)晶粒形貌復(fù)雜、晶界曲折或需要局部加密網(wǎng)格時(shí),為了保持對(duì)邊節(jié)點(diǎn)對(duì)應(yīng),邊界常被迫變成“階梯狀”的幾何近似。
2338 1
晶體塑性有限元 ??? 3月前
abaqus中主、從面公共節(jié)點(diǎn)錯(cuò)誤。
我是用Hypermesh畫的網(wǎng)格,為了保證軸與孔的網(wǎng)格可以對(duì)齊,我先把軸的網(wǎng)格畫出來(lái)了,然后把軸的側(cè)面的網(wǎng)格硬點(diǎn)映射到孔的側(cè)面,然后畫的軸的網(wǎng)格。
2421 3 1
對(duì)方正在輸入_0769 ??? 2年前
康謀方案 | 高精度時(shí)間同步技術(shù)的實(shí)現(xiàn)與應(yīng)用 
3、時(shí)間同步的失效容錯(cuò):靜態(tài)配置與動(dòng)態(tài)監(jiān)測(cè)方案通過(guò)多重容錯(cuò)機(jī)制保障系統(tǒng)魯棒性:(1)靜態(tài)端口狀態(tài)配置:通過(guò) XTSS Configurator 設(shè)置接口的固定端口狀態(tài)(Master/Slave/Disabled),強(qiáng)制指定主時(shí)鐘節(jié)點(diǎn),避免因 BMCA(最佳主時(shí)鐘算法)協(xié)商失敗導(dǎo)致的同步失效。
2188
康謀keymotek ??? 11月前
Moldex3D模流分析模型之結(jié)構(gòu)網(wǎng)格 
?對(duì)齊點(diǎn) (Align Nodes): 在兩個(gè)實(shí)體網(wǎng)格之間縫合接觸面。點(diǎn)選的第一個(gè)實(shí)體網(wǎng)格將固定所有節(jié)點(diǎn);點(diǎn)選的第二個(gè)實(shí)體網(wǎng)格將以容許值(最小網(wǎng)格尺寸)移動(dòng)其節(jié)點(diǎn)來(lái)與第一個(gè)實(shí)體網(wǎng)格匹配: -單擊圖標(biāo)并點(diǎn)選 第一個(gè)實(shí)體網(wǎng)格(節(jié)點(diǎn)固定)和 第二個(gè)實(shí)體網(wǎng)格(節(jié)點(diǎn)將被移動(dòng)) 。 -指定網(wǎng)格節(jié)點(diǎn)搜尋和移動(dòng)距離的 容許值。
2598 2 1
Moldex3D 中國(guó) ??? 3年前
dynal/hyperworks怎樣加載強(qiáng)制位移?
請(qǐng)問(wèn)dynal怎么加載一個(gè)強(qiáng)制位移,比如說(shuō)在某個(gè)節(jié)點(diǎn)上在Z向上加載80mm的強(qiáng)制位移,但在運(yùn)動(dòng)過(guò)程中,其它兩個(gè)方向不會(huì)產(chǎn)生位移變化
2012 2
小程序用戶_oBTOULj0 ??? 1年前
Fidelity Pointwise中用于近體和離體網(wǎng)格的十六進(jìn)制核心體素 
正如將要討論的那樣,通過(guò)將體素轉(zhuǎn)換為占據(jù)與體素相同空間的六角核心網(wǎng)格來(lái)強(qiáng)制執(zhí)行嚴(yán)格的細(xì)胞到細(xì)胞連接。 根體素 各向同性體素網(wǎng)格化已以三種相似但不同的模式實(shí)施到 Fidelity Pointwise 中。這些方法中的每一種都從構(gòu)建根體素系統(tǒng)開(kāi)始,其中根體素尺寸很小,同時(shí)仍然允許體素大小在 x、y 和 z 方向上保持一致。
2242 2
Cadence CFD學(xué)習(xí) ??? 3年前
Moldex3D遠(yuǎn)端計(jì)算的工作排程器之使用工作排程器2 
強(qiáng)制閑置/取消強(qiáng)制閑置 (Force idle / Unforce idle) 管理者可決定計(jì)算節(jié)點(diǎn)的邏輯處理器是否要參與計(jì)算,在節(jié)點(diǎn)資源的對(duì)話框中,選取單一列并點(diǎn)擊取消強(qiáng)制閑置(Unforce idle),讓此邏輯處理器參與計(jì)算。
2063
Moldex3D 中國(guó) ??? 3年前
知識(shí)圖譜:技術(shù)成熟度飛速躍升,與產(chǎn)業(yè)互聯(lián)結(jié)合更加緊密 
然后,進(jìn)行集成推理,合并來(lái)自多個(gè)特定語(yǔ)言 KG 嵌入的預(yù)測(cè)結(jié)果;3.知識(shí)圖譜與推薦系統(tǒng)結(jié)合方向,學(xué)者首先算出圖中各類型節(jié)點(diǎn)的嵌入,結(jié)合注意力機(jī)制,利用鄰居節(jié)點(diǎn)為中心節(jié)點(diǎn)提供更豐富的信息,然后利用傳統(tǒng)的“頭結(jié)點(diǎn)+關(guān)系=目標(biāo)節(jié)點(diǎn)”的方法訓(xùn)練最終的圖嵌入表示,最后接入下游的推薦系統(tǒng)模型。此外,圖神經(jīng)網(wǎng)絡(luò) GNN 被廣泛應(yīng)用于圖機(jī)器學(xué)習(xí)。
2204
龍騰AI技術(shù) ??? 3年前
Moldex3D模流分析之創(chuàng)新求解器資料庫(kù)&專案管理 
[Cloud] 強(qiáng)化Moldex3D Cloud-Connect 可以快速地將Moldex3D的計(jì)算節(jié)點(diǎn)布署在各個(gè)不同的云計(jì)算平臺(tái),讓使用者能夠更好的來(lái)利用高效能計(jì)算(HPC) 處理在線計(jì)算工作l 支持AWS CycleCloud上云計(jì)算建置的Linux節(jié)點(diǎn)布署l 支持AWS上的計(jì)算節(jié)點(diǎn)布署及地端授權(quán)的連結(jié)l 需要額外的 Cloud-Connect 授權(quán)來(lái)啟用各平臺(tái)的計(jì)算節(jié)點(diǎn)布署
1949
Moldex3D 中國(guó) ??? 3年前
LS-DYNA中自適應(yīng)ISPG方法的最新進(jìn)展及其應(yīng)用--回流焊、膠粘劑流動(dòng)和涂層模擬 
在最新開(kāi)發(fā)版本求解器(Dev版本),借助自適應(yīng)ISPG的網(wǎng)格更新功能,焊球與結(jié)構(gòu)邊界完全貼合,沒(méi)有出現(xiàn)任何穿透現(xiàn)象;且流體和固體表面緊密對(duì)齊;節(jié)點(diǎn)從原來(lái)的1,336個(gè)變化為2,632個(gè),模擬時(shí)間50毫秒,1個(gè)CPU計(jì)算時(shí)間25分鐘。
3884 6
Ansys中國(guó) ??? 2年前
基于Abaqus離散元法的攪拌機(jī)中顆粒介質(zhì)的混合 
一個(gè)與滾筒軸對(duì)齊的CARDAN連接類型連接元件附加到滾筒的參考節(jié)點(diǎn)上。連接元件用于施加扭矩以旋轉(zhuǎn)滾筒。石灰石和聚乙烯顆粒使用PD3D元素進(jìn)行建模。顆粒呈球形。本示例中使用的模型具有8556個(gè)半徑為6毫米的PD3D元素和12478個(gè)半徑為5毫米的PD3D元素。網(wǎng)格設(shè)計(jì)?很難以精確平衡的配置開(kāi)始此類模擬。
2539 2
工科小師妹 ??? 12月前
Moldex3D遠(yuǎn)端計(jì)算之單節(jié)點(diǎn)模式 
?在 "節(jié)點(diǎn)(Node)" 頁(yè)面中,只有一個(gè)節(jié)點(diǎn)存在,此節(jié)點(diǎn)為目前使用的計(jì)算機(jī) (本機(jī))。?使用者無(wú)法增加/移除節(jié)點(diǎn),但可以將節(jié)點(diǎn)設(shè)定為聯(lián)機(jī)(online) /脫機(jī)(offline)。 ?雙擊節(jié)點(diǎn)便可以看到更詳細(xì)的信息。如果不希望Moldex3D的工作占用所有的邏輯處理器資源,請(qǐng)選擇邏輯處理器并點(diǎn)擊 "強(qiáng)制閑置(Force idle)" 按鈕。
1866
Moldex3D 中國(guó) ??? 3年前
LS-DYNA中自適應(yīng)ISPG方法的最新進(jìn)展及其應(yīng)用--回流焊、膠粘劑流動(dòng)和涂層模擬
在最新開(kāi)發(fā)版本求解器(Dev版本),借助自適應(yīng)ISPG的網(wǎng)格更新功能,焊球與結(jié)構(gòu)邊界完全貼合,沒(méi)有出現(xiàn)任何穿透現(xiàn)象;且流體和固體表面緊密對(duì)齊;節(jié)點(diǎn)從原來(lái)的1,336個(gè)變化為2,632個(gè),模擬時(shí)間50毫秒,1個(gè)CPU計(jì)算時(shí)間25分鐘。
6893 6
小白Johnny ??? 2年前
橋梁結(jié)構(gòu)的振動(dòng)測(cè)試及案例解析 
總共布置了29個(gè)垂直加速度傳感器測(cè)量點(diǎn)以測(cè)試橋梁的垂直模式或扭轉(zhuǎn)模式,節(jié)點(diǎn)28,節(jié)點(diǎn)1117,節(jié)點(diǎn)2026,節(jié)點(diǎn)2834、28個(gè)測(cè)量點(diǎn)和節(jié)點(diǎn)10。在該位置設(shè)置參考點(diǎn)。橋梁水平振動(dòng)測(cè)試13個(gè)水平加速度傳感器測(cè)量點(diǎn),節(jié)點(diǎn)8-14布置7個(gè)橋面板水平測(cè)量點(diǎn),節(jié)點(diǎn)22-26布置5個(gè)水平測(cè)量點(diǎn)在拱上,參考點(diǎn)布置在該位置附近節(jié)點(diǎn)8。
5929 4 9
仿真客 ??? 2年前
ANSYS ACP復(fù)合材料鋪層固定機(jī)翼蒙皮肋筋仿真,附講解視頻及模型文件 
o 為了便于共節(jié)點(diǎn)識(shí)別或接觸定義,可在接觸區(qū)域生成輔助線或面,確保網(wǎng)格劃分時(shí)節(jié)點(diǎn)對(duì)齊,避免因網(wǎng)格不匹配導(dǎo)致計(jì)算錯(cuò)誤。
2.2 材料定義1. 在左側(cè)Component Systems找到ACP模塊,拖拽到A模塊下Gometry下,這樣可以利用前面已有的模型。
2.
6422 38 13
孫一凡仿真 ??? 1年前
轉(zhuǎn)子動(dòng)力學(xué)中相位檢測(cè)的重要作用 
相位反轉(zhuǎn)90°時(shí)形成節(jié)點(diǎn),聯(lián)軸器位移為零(稱為"反共振轉(zhuǎn)速"),如圖4所示。圖4 帶軸伸結(jié)構(gòu)的Jeffcott轉(zhuǎn)子伯德圖當(dāng)在聯(lián)軸器端加4盎司-英寸不平衡量與圓盤不平衡量反相時(shí),系統(tǒng)仍會(huì)呈現(xiàn)特殊動(dòng)力學(xué)行為。第一反共振點(diǎn):約4,000 RPM,低速區(qū)振幅較小但伴隨180°相位突變。第二反共振點(diǎn):約8,500 RPM(自平衡轉(zhuǎn)速)同樣出現(xiàn)180°相位反轉(zhuǎn)特性。
3305 23 8
金_2575 ??? 12月前
20條/頁(yè) 
 10
10 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
