



基于abaqus的牛頓擺案例 

基于abaqus的牛頓擺,包含cae文件
373 3
王二濤 ??? 6年前
擬牛頓算法 BFGS matlab程序 
%%%%%% Matlab程序--BFGS擬牛頓算法 % clc % clear % syms x1 x2 % f=@(x1,x2)x1.^2+x2.^2-x1*x2-10*x1-4*x2+60 % X=BFGS(f,[0,0],1e-8,100) function x=BFGS(f,x0,eps,k) %f為函數(shù)表達(dá)式,x0初始值向量,eps誤差,k迭代次數(shù) x0=x0'; TiDu=matlabFunction
1877 1
dwg_2931 ??? 4年前
MATLAB牛頓迭代求根 
一個(gè)基于MATLAB進(jìn)行牛頓迭代的簡(jiǎn)單案例~NewtonRaphson.zip
2015
iAM-Mechanics ??? 2年前
MATLAB/Simulink建模-車(chē)輛巡航控制 (1) 
牢記以上幾點(diǎn),我們針對(duì)這個(gè)問(wèn)題提出了以下設(shè)計(jì)標(biāo)準(zhǔn): 上升時(shí)間 < 5 秒 超調(diào) < 10% 穩(wěn)態(tài)誤差 < 2%開(kāi)環(huán)階躍響應(yīng)在沒(méi)有任何反饋控制的情況下,系統(tǒng)對(duì) 500 牛頓階躍輸入力的開(kāi)環(huán)響應(yīng)在 MATLAB 中模擬如下:m = 1000;b = 50;u = 500;s = tf('s');P_cruise = 1/(m
2702 11 4
AutoEuler ??? 4年前
《經(jīng)典力學(xué)》札記 
這個(gè)困難也可以從一些具體的計(jì)算問(wèn)題中看出來(lái),幾個(gè)彈簧連接在一起的球的運(yùn)動(dòng)軌跡,斜面上滾動(dòng)的小球,以及擺長(zhǎng)可以變化的單擺的運(yùn)動(dòng)等。所以在一些有約束條件的系統(tǒng)中,利用牛頓運(yùn)動(dòng)方程,都是不好處理的。力是牛頓力學(xué)的根本,每個(gè)地方都體現(xiàn)了力的作用。但是在很多力學(xué)課程中,比如電動(dòng)力學(xué)、統(tǒng)計(jì)力學(xué)、量子力學(xué)等課程中,力的概念就沒(méi)有那么根本了。
3023 21 20
仿真客 ??? 3年前
MATLAB牛頓-辛普森(Newton-Raphson)迭代求根

1876
iAM-Mechanics ??? 2年前
Fortran基礎(chǔ)編程——牛頓拉弗森迭代 
ITER46 FORMAT(T5,'Newton迭代法計(jì)算方程的根',//,& 3X,'X= ',F15.10,/,& 3X,'ITER=',I5)END PROGRAM main由上述程序可看出,主程序只有use、call、輸出語(yǔ)句,甚至可以將輸出語(yǔ)句編一個(gè)子程序,在主程序中用call調(diào)用即可,如此以來(lái),使得自己的代碼更加簡(jiǎn)潔明朗,在編寫(xiě)Python、Matlab
3636 14 5
易公子 ??? 3年前
151基于matlab的齒輪-軸-軸承系統(tǒng)的含間隙非線性動(dòng)力學(xué)模型 
基于matlab的齒輪-軸-軸承系統(tǒng)的含間隙非線性動(dòng)力學(xué)模型,根據(jù)牛頓第二定律,建立齒輪系統(tǒng)嚙合的非線性動(dòng)力學(xué)方程,同時(shí)也主要應(yīng)用修正Capone模型的滑動(dòng)軸承無(wú)量綱化雷諾方程,利用這些方程推到公式建模;用MATLAB求解畫(huà)出位移-速度圖像,從而得到系統(tǒng)在不同轉(zhuǎn)速下的混沌特性,分析齒輪-滑動(dòng)軸承系統(tǒng)的動(dòng)態(tài)特性。程序已調(diào)通,可直接運(yùn)行。
2398
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
Matlab有限元基礎(chǔ)編程 | 3節(jié)點(diǎn)桿單元(附云圖繪制) 
今天給大家分享的主要內(nèi)容:三節(jié)點(diǎn)桿單元Matlab有限元編程,并附帶云圖繪制后處理程序,獲取方法,見(jiàn)文末。
2955 5 1
易公子 ??? 3年前
基于Abaqus的Newton-Raphson算法 
MATLAB數(shù)值計(jì)算實(shí)戰(zhàn)[M]. 機(jī)械工業(yè)出版社, 2017.
3961 6
易公子 ??? 3年前
Adams 多體動(dòng)力學(xué):工業(yè)仿真的黃金標(biāo)準(zhǔn)與未來(lái)引擎
o Adams/Controls:機(jī)電一體化耦合模塊,與 MATLAB/Simulink 無(wú)縫對(duì)接,實(shí)現(xiàn)機(jī)械系統(tǒng)與控制系統(tǒng)聯(lián)合仿真。3. 核心技術(shù)原理基于拉格朗日方程與牛頓 - 歐拉方程,采用變步長(zhǎng)剛性積分算法 + 稀疏矩陣技術(shù),高效求解大規(guī)模非線性動(dòng)力學(xué)方程;支持剛?cè)狁詈稀⒎蔷€性接觸、摩擦、疲勞、振動(dòng)等多物理場(chǎng)耦合分析,兼顧計(jì)算精度與效率。二、核心優(yōu)勢(shì)1.
835
庭田科技 ??? 5天前
《虛擬世界的力學(xué)交響曲:Adams如何重塑工業(yè)仿真邊界》
跨維度控制器共舞突破性的控制-機(jī)械協(xié)同仿真接口,讓MATLAB的控制算法與Adams的機(jī)械模型實(shí)現(xiàn)毫秒級(jí)數(shù)據(jù)交換。某航天企業(yè)曾在此平臺(tái)上,提前6個(gè)月發(fā)現(xiàn)衛(wèi)星展開(kāi)機(jī)構(gòu)與姿態(tài)控制器的共振死區(qū)。
2266
庭田科技 ??? 11月前
組合式黏滯阻尼器ANSYS-CFD分析 
ANALYSIS 對(duì)黏滯阻尼器滯回曲線采用MATLAB進(jìn)行擬合,根據(jù)F=CV^a,擬合出阻尼器的阻尼系數(shù)C和阻尼指數(shù)a值。
2616 2
防震技術(shù) ??? 2年前
Ansys及有限元理論相關(guān)國(guó)外書(shū)籍推薦 
3、Introduction to Nonlinear Finite Element Analysis前面提到的兩本書(shū)多以介紹基本彈性理論為主,這本書(shū)則主要側(cè)重于對(duì)非線性方面的有限元理論介紹,比如在ANSYS中經(jīng)常遇到的弧長(zhǎng)法、牛頓-拉普拉斯求解方法原理都可以在這里面找到,非常適合論文里面需要寫(xiě)理論公式的同學(xué),懂的都懂,其中還有Matlab代碼案例演示,幫助理解部分概念,適合與上面兩本書(shū)配合一起研讀
3925 3 1
仿真客 ??? 3年前
自主水下航行器 (AUV) | 近實(shí)時(shí)仿真與控制助力實(shí)現(xiàn)水下機(jī)動(dòng)航行 
例如,在一種情況下,該團(tuán)隊(duì)希望 AUV 執(zhí)行倒立擺操縱,其中涉及到航行器向后俯沖,保持垂直方向,然后向上移動(dòng),直到其前端露出水面。如果僅限于使用 AUV 本身進(jìn)行試驗(yàn),則為這種操縱找到一種有效的控制策略將極其困難。所幸的是,通過(guò)仿真,能夠快速嘗試各種 MPC 設(shè)計(jì)和 PID 控制器組合,并在 MATLAB 中生成詳細(xì)的仿真結(jié)果圖(圖4),以了解哪種方法最為有效。 圖 4.
3067 3 2
泡沫oO ??? 2年前
【JY】橡膠系支座/摩擦系支座全面解析 
【JY】如何解決MATLAB GUI編程軟件移植運(yùn)行問(wèn)題?
3232 6 1
建源之光 - 減隔震 ??? 3年前
在 COMSOL 中對(duì)自適應(yīng)光學(xué)系統(tǒng)進(jìn)行仿真 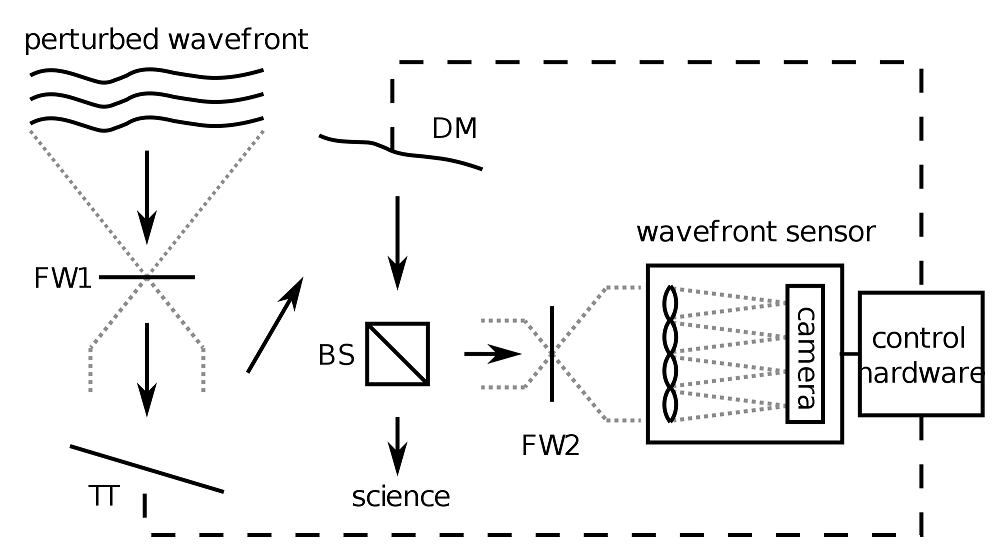
我們還有許多包括角隅反射器模型或牛頓望遠(yuǎn)鏡系統(tǒng)中的光線傳播建模在內(nèi)的許多射線光學(xué)仿真案例供您參考,可在 COMSOL 官網(wǎng)下載。 本文內(nèi)容來(lái)自 COMSOL 博客
3690 1
光與影 ??? 2年前
電動(dòng)賽車(chē)半主動(dòng)懸架系統(tǒng)仿真及實(shí)現(xiàn) 
根據(jù)牛頓第二定律,建立動(dòng)力學(xué)方程:(1)(2)選取懸掛質(zhì)量位移zs和振動(dòng)速度,非懸掛質(zhì)量位移和振動(dòng)速度為狀態(tài)變量,令,狀態(tài)向量為,則系統(tǒng)狀態(tài)方程為:(3)其中: 半主動(dòng)懸架最優(yōu)控制目標(biāo)是提高汽車(chē)平順性和操縱穩(wěn)定性,反映在物理量上就要盡可能地減小懸掛質(zhì)量垂直振動(dòng)加速度和輪胎變形量,并限制懸架動(dòng)擾度,同時(shí)從實(shí)現(xiàn)控制的角度看,應(yīng)使控制能量的消耗較小。
2688 5 1
盧平luping ??? 4年前
【綜述】船舶在波浪上縱向運(yùn)動(dòng)與控制研究 
2001 年,該團(tuán)隊(duì)在通過(guò) CFD 計(jì)算船舶水動(dòng)力系數(shù)的基礎(chǔ)上,建立了波浪、力、運(yùn)動(dòng)之間的傳遞函數(shù),使用 Matlab 的 Simulink 模塊對(duì)該船的運(yùn)動(dòng)與控制進(jìn)行了數(shù)值仿真 [50] ,并通過(guò)模型試驗(yàn)進(jìn)行了驗(yàn)證 [51] 。
2877 1
海工 ??? 3年前
基于動(dòng)力性指標(biāo)的純電動(dòng)汽車(chē)電機(jī)參數(shù)設(shè)計(jì) 
4.1 動(dòng)力系統(tǒng)微分方程將汽車(chē)作為研究質(zhì)點(diǎn),由牛頓第二定律得:式中,T是電機(jī)輸出最大扭力,如圖1中的修正加速性能理論線。它是關(guān)于車(chē)速v的函數(shù),分為恒扭力段與修正恒功率段。微分方程(10)在恒功率段不能使用理論法求解,因此使用數(shù)值解法。本文使用固定步長(zhǎng)為0.1s的龍格-庫(kù)塔法求解。
2790
EDC電驅(qū)未來(lái) ??? 4年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
