



Workbench LS-DYNA墜落向?qū)履茉措姵匕?em>墜落過程操作文檔-附講解視頻及模型文件 
1、概述 LS-DYNA是一款業(yè)界領(lǐng)先的顯式有限元分析軟件,廣泛應(yīng)用于墜落測試、沖擊與穿透、碰撞、乘員安全等領(lǐng)域。其墜落測試模塊通過簡化操作流程,使用戶能夠輕松設(shè)置和運(yùn)行墜落測試仿真。本文將結(jié)合實(shí)際案例,詳細(xì)介紹電池包墜落測試的仿真步驟,并提供一些注意事項(xiàng),以幫助讀者更好地理解和應(yīng)用該模塊。
3956 15 7
孫一凡仿真 ??? 11月前
熱仿真 | 月球探索:照亮陰影中的目標(biāo) 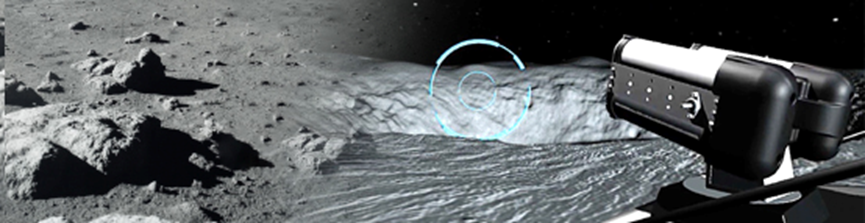
為了測試其設(shè)計(jì)的有效性,ASU選擇了代表最壞情況的墜落測試速度:探測器在沒有任何入射角的情況下,以12.72米/秒的速度撞擊風(fēng)化層。 第一次仿真比較了探測器從1.67米(5.4英尺)的高度墜落到混凝土表面與沙基表面上。產(chǎn)生的加速度用于對探測器外殼在發(fā)射到固體表面時的行為進(jìn)行結(jié)構(gòu)分析。仿真結(jié)果表明,探測器外殼的性能與設(shè)計(jì)意圖一致。
2421 2
Ansys中國 ??? 3年前
雙旋翼飛行器如何在旋翼故障時避免墜毀 
綜合仿真與視景顯示 視景顯示的原理如下圖所示 ,Simulink將仿真得到的數(shù)據(jù)發(fā)送至FlightGear中,驅(qū)動模型的運(yùn)動顯示,使控制器的效果和飛行器的狀態(tài)更加直觀的展示。 圖5:FlightGear視景顯示原理 為了驗(yàn)證被動容錯控制器的效果,我們給定一定的任務(wù)的條件進(jìn)行仿真。
2339
無人機(jī)10086 ??? 3年前
鋁合金附著式升降防護(hù)平臺防墜裝置優(yōu)化研究 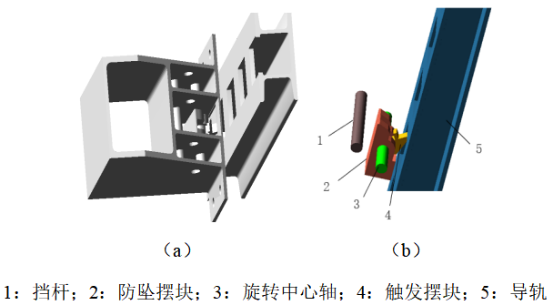
根據(jù)仿真結(jié)果可知,在整個制動過程中,防墜結(jié)構(gòu)主要受力部位在防墜擺塊、旋轉(zhuǎn)中心軸以及擋桿處,由于導(dǎo)軌墜落與防墜擺塊的碰撞沖擊直接傳遞給旋轉(zhuǎn)中心軸并承受沖擊載荷,因此中心軸的受力最大,為521.5kN。我們以最不利工況下的最大沖擊力為優(yōu)化目標(biāo),以制動距離不超過80mm為約束條件。
2466 2
擺渡人張 ??? 2年前
案例分享 | Cradle CFD創(chuàng)新可實(shí)現(xiàn)出色的室內(nèi)空氣流通 
Shigemori說,吊扇可能會由于葉片振動而損壞,甚至可能因葉片振動而墜落,在某些情況下,還可能受空調(diào)風(fēng)的影響,這可能會在敲打風(fēng)扇時增加風(fēng)壓(外部壓力)。 警告說明已寫在風(fēng)扇用戶手冊上,但是由于可能在空調(diào)附近安裝風(fēng)扇,公司需要通過仿真來驗(yàn)證安全性。 分析涉及計(jì)算施加在風(fēng)扇葉片上的力以及葉片變形,因此公司一直在使用流體和結(jié)構(gòu)分析的聯(lián)合仿真。
2306
MSC Cradle CFD ??? 3年前
FENSAP-ICE應(yīng)用實(shí)例--多因素影響下的風(fēng)力機(jī)結(jié)冰模擬 
鑒于以上葉片結(jié)冰的巨大危害,所以本文通過仿真方法確定多個因素對結(jié)冰的影響,盡可能優(yōu)化設(shè)計(jì)以減少結(jié)冰情況的發(fā)生。另外,通過仿真方法分析結(jié)冰厚度、結(jié)冰位置,為后續(xù)除冰提供指導(dǎo)依據(jù)。1 仿真前處理1.1 幾何模型處理在進(jìn)行數(shù)值計(jì)算之前,往往需要將數(shù)模進(jìn)一步的處理,以方便而準(zhǔn)確地得到數(shù)值解。這部分?jǐn)?shù)模處理工作使用ANSYS SCDM中的建模工具完成。
4744 29 6
工科小師妹 ??? 1年前
聚合物基復(fù)合材料沖擊后壓縮強(qiáng)度(CAI)測試標(biāo)準(zhǔn)解讀及主要挑戰(zhàn)分析 
但這類材料存在一個關(guān)鍵短板——對沖擊損傷異常敏感:微小的面外沖擊(如冰雹撞擊、工具墜落、碎石撞擊),就可能在材料內(nèi)部造成分層、基體裂紋等難以目視察覺的損傷,進(jìn)而大幅降低其承載能力,嚴(yán)重威脅結(jié)構(gòu)安全。
2536
國高材高分子材料產(chǎn)業(yè)創(chuàng)新中心 ??? 2月前
簡述極端變形問題的數(shù)值模擬 
</span></p><p class="ql-align-justify"><span style="color: rgb(0, 0, 0);">小到踩扁一個易拉罐、射穿一塊玻璃,大到飛機(jī)墜落、天體撞擊,許多極端變形問題中的斷、裂、破、碎等現(xiàn)象往往會引發(fā)災(zāi)難性的后果。
2806
仿真APP ??? 1年前
BIM的183個知識點(diǎn),看完快速熟悉BIM!
56、安全管理具體應(yīng)用: 施工準(zhǔn)備階段安全控制、施工過程仿真模擬、模型試驗(yàn)、動態(tài)監(jiān)測、防墜落管理、塔吊安裝管理、災(zāi)害應(yīng)急管理。 57、BIM成本控制優(yōu)勢表: 快速、準(zhǔn)確、精細(xì)、分析能力強(qiáng)、提升企業(yè)成本控制能力。
2321 1
機(jī)電安裝 ??? 4年前
一文讀懂BIM施工模擬-虛擬建造(內(nèi)容詳細(xì)) 
人流模擬將利用Navisworks中的漫游功能,實(shí)現(xiàn)圖形仿真,從而可以準(zhǔn)確查明個體在各處行走時,是否會出現(xiàn)撞頭、臨邊墜落等硬碰撞,與碰撞處理相結(jié)合控制人員運(yùn)動,并調(diào)整模型。 采用軟件模擬,專業(yè)工程師在模擬過程中及時發(fā)現(xiàn)問題,并進(jìn)行發(fā)現(xiàn)-記錄-解決流程,重新修訂方案和模型。
4537
學(xué)長施工日志 ??? 2年前
基于FLAC3D的地下硐室通道錨網(wǎng)噴支護(hù) 附FLAC-3D深基坑的開挖與支護(hù)的命令流下載 
越是彌足珍貴的軟件,外表看上去,往往越是平常無奇,仿真模擬給全身心帶來的幸福,從來也是如此。 --指尖上的仿真 FLAC3D軟件主要用于解決巖土工程問題,由美國的ITASCA公司開發(fā)。
3859 1
模玩 ??? 3年前
一種變軸螺旋槳水空跨域無人航行器設(shè)計(jì)和控制技術(shù) 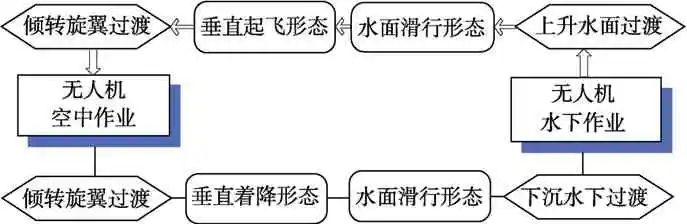
control process with interference compensation 4.3 可傾轉(zhuǎn)螺旋槳無人機(jī)過渡狀態(tài)的高度控制 可傾轉(zhuǎn)旋翼無人機(jī)在整個傾轉(zhuǎn)過渡過程中,旋翼為主維持升力狀態(tài)飛行時,旋翼傾轉(zhuǎn)角度小但前飛速度小;而機(jī)翼為主維持升力狀態(tài)飛行時,旋翼傾轉(zhuǎn)角度大,在前飛速度不足的情況下則機(jī)翼升力(機(jī)翼升力與速度平方成正比)仍然很小,旋翼升力已迅速下降,會出現(xiàn)掉高強(qiáng)烈振蕩甚至失速墜落的現(xiàn)象
6361 1 2
aero-engine ??? 2年前
從安全壽命到損傷容限—飛機(jī)結(jié)構(gòu)設(shè)計(jì)的觀念變化與演進(jìn)(上) 
1954年1月10日,一架已飛行1,286架次、3,680飛行小時的“彗星”1,從新加坡飛往倫敦,從最后停靠站羅馬再度起飛后半小時爬升到約8,100米的高度時,早天候良好的情況下機(jī)身解體并有部分起火燃燒,墜落在意大利厄爾巴島(Elba)畔的地中海。
4251 1
航發(fā)設(shè)計(jì) ??? 3年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
