



并聯機械手爪運動學分析 
通過表2.7的D-H參數,在MATLAB中編寫的程序如下圖2.8所示: 圖2.8 Link函數程序 采摘機器手爪的運動學仿真模型由該程序代碼在MATLAB軟件中運行得出,其模型如下圖2.9所示: 圖2.9 機械手運動學模型 2.4.5 運動模型驗證 上文已將完成了對采摘機器手爪運動學理論模型的建立。
2284
余俊煒 ??? 2年前
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”?
在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地 
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”? 在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地板的核心內核,直接影響其抗變形、耐磨損、承重力等關鍵性能,是區分產品優劣的“勝負手”。
2481
河北威岳 ??? 3月前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
1正運動學分析 采用標準的D-h法進行機械腿模型分析: D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
5213 1
余俊煒 ??? 2年前
基于SolidWorks的自動裝卸機械結構設計 
摘 要:機械手是能夠實現自動化定位控制的多功能機器,在國內外工業自動化控制領域中占據主要地位。使用模塊化和優化設計 理論實現自動裝卸機械結構的設計,利用 ANSYS 軟件進行校核,使用 SolidWorks 軟件實現運動過程仿真。仿真結果表明,該設計能 夠滿足機械運動需求,可降低裝卸成本,提高裝卸工作效率。
4675 5
太極元氣 ??? 2年前
基于ADAMS的助老起升裝置的運動學仿真分析 
[9] 劉明亮,朱海清,李 超.基于 ADAMS 的安全閥自動上料機械 手運動學研究[J].輕工機械,2020,38( 6) : 19-23. [10] 任 昭.基于 ADAMS 的三軸數控運動平臺仿真分析[J].機床 與液壓,2016,44( 8) : 17-20.文章來源:機械研究與應用
2600 5
擺渡人張 ??? 2年前
凸輪軸承:機械運動中的穩定支撐 
通過了解其定義、工作原理、分類、應用以及維護保養措施,我們可以更好地認識和使用凸輪軸承,確保機械設備的穩定運行和高效性能。未來,隨著科技的進步和機械工程領域的發展,凸輪軸承將繼續不斷創新和優化,為機械設備的發展提供有力支持。 瀏覽更多工業產品知識,訪問工業品一站式采購平臺-米蘇米https://www.misumi.com.cn/ 工業品一站式采購平臺
2433
用戶_42475 ??? 2年前
【米思米機械設備知識分享】- 滾珠絲杠的工作原理是什么 
滾珠絲杠的工作原理描述:滾珠絲杠是將回轉運動轉化為直線運動,或將直線運動轉化為回轉運動的理想的產品。滾珠絲杠由螺桿、螺母、鋼球、預壓片、反向器、防塵器組成。它的功能是將旋轉運動轉化成直線運動,這項發展的重要意義就是將軸承從滑動動作變成滾動動作。 由于具有很小的摩擦阻力,滾珠絲杠被廣泛應用于各種工業設備和精密儀器。
2092
MISUMI米 ??? 3年前
基于模仿學習和強化學習的機械臂運動技能獲取 
以 Actor-Critic 算法為主體結構搭建了機械臂強化學習模型,結合設計的獎賞函數學習優化技能策略。 圖2 強化學習部分訓練過程 最后,針對上述方法搭建了相應的實驗平臺。實驗平臺的硬件系統包括 UR5 機械臂、氣動二指手抓、Kinect V2 深度攝像頭等;軟件系統由ROS 機器人操作系統、MoveIt!
3351
機械設計師 ??? 4年前
機械手臂運動仿真APP 
用戶可以設置末端手爪的起始位置坐標和仿真步長,對比分析不同起始位置時手爪的運動位移和移動速度曲線。
2478 1
仿真APP ??? 1年前
《基于 ABAQUS 的大跨距桁架不同截面模態分析和結構優化》 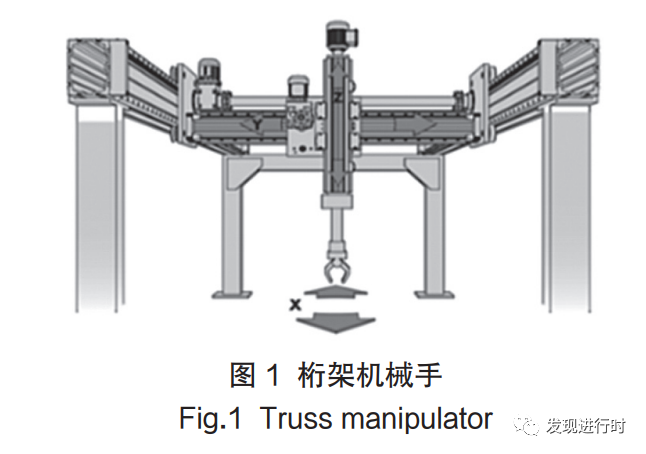
[ 關鍵詞 ] ABAQUS;結構優化;模態分析;振動;桁架機械手0 引言 桁架機械手是一種建立在直角 X,Y,Z 三 坐標系統基礎上 [1],可以調整零件位置,或者實 現零件的軌跡運動等功能的全自動工業設備 [2]。大部分桁架機械手由直線運動模塊組成 [3-4]。本 文針對江西贛州某自動化加工鐘表企業,實現自 動抓取加工表殼功能,設計出一款適用于多臺 CNC 車床的大跨距桁架機械手。
3166 2
CAEer吳皓 ??? 2年前
2024天津工業自動化展|2024天津工博會·工業自動化展 
【展覽范圍】※ 工業機器人本體及核心部件:焊接機器人、噴涂機器人、碼垛機器人、搬運機器人,裝配機器人、智能倉儲機器人及系統、驅動系統RV減速器、諧波減速器、精密減速器、控制器、伺服電機、步進電機,夾具\抓手、氣缸及液壓缸、機器視覺系統及組件,直線運動\導軌設備,滾珠花鍵、滾珠絲杠和連桿球等;※ 工業自動化核心智能系統:組裝及搬運系統/線性定位系統、工業影像處理系統、控制系統
2030
上海梵翡會展有限公司 ??? 2年前
為什么說AR可視化讓機械臂實驗更高效? 
與工業領域常見的關節機器人/多軸機械臂相比,柔性機械臂的優勢在于扭轉方向和程度更靈活,不受關節旋轉角度限制,可彎曲成各種形狀。而且易于定制,適用于制造、航天器維護、損傷復健等場景。不過,柔性機械臂運動方式更加復雜,其運動軌跡是非線性的,因此需要建立動力學模型來動態控制。此外,柔性機械臂可輔助關節機器人,作為靈活的第三只手臂來進行分擔工作量。
3904 2 1
機械設計師 ??? 4年前
2026第18屆深圳國際工業自動化及機器人展覽會 
展示范圍:工業機器人本體及核心部件:焊接機器人、噴涂機器人、碼垛機器人、搬運機器人,裝配機器人、智能倉儲機器人及系統、驅動系統RV減速器、諧波減速器、精密減速器、控制器、伺服電機、步進電機,夾具\抓手、氣缸及液壓缸、機器視覺系統及組件,直線運動\導軌設備,滾珠花鍵、滾珠絲杠和連桿球等;工業自動化核心智能系統:組裝及搬運系統/線性定位系統、工業影像處理系統、控制系統,PLC, SCADA、
1795
用戶_33840 ??? 4月前
matlab與Adams的機械臂運動學驗證 
1、Adams的運動學建模 在Adams中建立機械臂模型,如圖1所示,箭頭為機械臂末端執行器的初始位置。
2975 1 1
木火柴 ??? 4年前
Adams 多體動力學:工業仿真的黃金標準與未來引擎
· 支持大規模并行計算(HPC),可處理數千構件的復雜系統(如整車、風電整機),求解穩定性強,工業驗證案例超 4000 家企業。2. 剛柔耦合與多學科集成能力· 獨創混合建模架構,可同時模擬剛體(齒輪、連桿)的剛性運動與柔體(殼體、軸類)的彈性變形,捕捉微米級變形與大幅度運動的耦合效應,適配精密機械、航空航天等高精度場景。
838
庭田科技 ??? 5天前
機器視覺技術在工業智能化生產中的應用
3 機器視覺在工業控制領域的應用現代化的工業生產大多傾向機械一體化,例如,薯片的生產,從土豆的清洗,到最后薯片的裝袋、封口,都不需要人為參與。當然有的人要說這樣生產出來的東西沒有人情味,但是我想說機械一體化的生產方式或許將是未來所有工業生產的大趨所示,其優點不在贅述。那么,怎么才能控制機械化生產呢?這就要用到機器視覺技術來控制機器生產。
2204
Im智能注塑 ??? 3年前
基于ADAMS的點按手法運動仿真 
機器人手臂已廣泛應用于生活和工業的各個方面。本文以具有最優靈活工作空間的六自由度機器人手臂構型為載體,建立六自由度機器人手臂的虛擬樣機模型,并在虛擬樣機中通過軌跡的規劃,使機器人手臂的末端實現點按手法運動軌跡。在此基礎上得到機器人手臂關節空間的曲線圖,為控制策略實施提供依據。
3010 2
擺渡人張 ??? 2年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
?MFBD(FFlex)技術重現電纜的大變形并預測其強度?考慮了柔性電纜和剛性圓盤之間的接觸(包括摩擦)▎工具包?RecurDyn/Professional ?RecurDyn/FFlex▎工程問題?需要瞬態動力學分析來預測機械手臂的運動?電纜經歷非線性大變形和摩擦接觸?不同的電纜材料(如尼龍或聚四氟乙烯)可能會影響機械手臂的運動?必須確定機械手的工作體積
3366
杭州擬創(RecurDyn原廠) ??? 4年前
庫卡、ABB等12家機械臂3D打印解決方案 
隨著增材制造工業化,我們會注意到一個明顯的趨勢,那就是業內對大幅面增材制造的關注度越來越高。這可以通過大型機器實現,尤其是那些使用 FDM 的機器,同時機械臂也為用戶提供了許多優勢。機器人手臂手不僅可以憑借其長距離臂進行大規模打印,而且由于其多軸以及制造部件通常不需要支撐結構這一事實,它還可以實現更大的自由度。
2980
南極熊3D打印 ??? 3年前
沖壓工業機器人應用技術概述 
有現場操作經驗的人都了解,對機器人進行示教操作是一件耗時耗力的工作,需要反復操作機械手校對點位,以期達到模具與產品嚴絲合縫。如果完全通過示教來微調動作,其實是非常考驗操作人員耐心的。那么,有沒有一種方式,能將示教工作變得更加簡潔高效? 4.拖動示教 運動控制系統通過其獨有的力矩檢測模式,實現了可拖動示教功能。
3660 1
金屬加工前沿 ??? 2年前
20條/頁 
 40
40 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
