



Matlab機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)仿真:包含三桿滑塊機(jī)構(gòu)\四桿\六桿 

詳細(xì)介紹了三桿滑塊機(jī)構(gòu)和四桿機(jī)構(gòu)運(yùn)動(dòng)方程的推導(dǎo)及matlab對(duì)上述機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)仿真,并實(shí)現(xiàn)機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)動(dòng)畫的繪制,注:六桿機(jī)構(gòu)無公式推導(dǎo)文本,只有代碼。如需模型推導(dǎo)說明文本及matlab源碼,請(qǐng)附件下載。
16
SimPC ??? 3年前
210基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運(yùn)動(dòng)代碼 
基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運(yùn)動(dòng)代碼,包括運(yùn)動(dòng)仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調(diào)通,可直接運(yùn)行。
2296
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
ANSYS-WorkBench教程 曲柄連桿機(jī)構(gòu)剛?cè)狁詈稀⑽佪單仐U瞬態(tài)動(dòng)力學(xué)有限元仿真 
本課程結(jié)合工程實(shí)際,使用workbench軟件對(duì)曲柄連桿機(jī)構(gòu)與蝸輪蝸桿的工作過程進(jìn)行仿真,課程包含:曲柄連桿機(jī)構(gòu)及曲柄滑塊(除運(yùn)動(dòng)副的設(shè)置外、還設(shè)置了摩擦副)。運(yùn)用瞬態(tài)分析模塊,介紹了分析子步與計(jì)算收斂性的設(shè)置。詳細(xì)展示瞬態(tài)分析的建模流程與參數(shù)設(shè)置的過程,并配有詳盡的仿真案例。
452 3
伍欣然 ??? 5年前
Adams&Workbench&Matlab四連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析 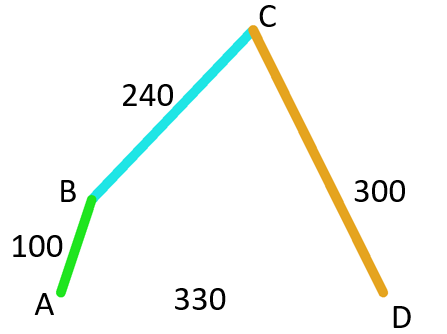
圖1為四連桿機(jī)構(gòu)的基本尺寸長(zhǎng)度,其中曲柄長(zhǎng)度為100mm,連桿的長(zhǎng)度為240mm,搖桿的長(zhǎng)度為300mm。
2809
擺渡人張 ??? 2年前
仿真實(shí)踐 | 汽車發(fā)動(dòng)機(jī)連桿模鍛&熱處理鏈?zhǔn)?em>仿真 
連桿作為發(fā)動(dòng)機(jī)曲柄連桿機(jī)構(gòu)中的關(guān)鍵受力件,對(duì)強(qiáng)度、硬度、組織一致性以及尺寸穩(wěn)定性要求極高,一旦模鍛流線、殘余應(yīng)力或淬火冷卻控制不當(dāng),極易在后續(xù)機(jī)加工和裝配過程中暴露出質(zhì)量波動(dòng)問題,影響裝機(jī)一致性與批量交付穩(wěn)定性。
1355 1
Supreium適創(chuàng)科技 ??? 20天前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
機(jī)構(gòu)的各類為柔性襯套,如何將機(jī)構(gòu)運(yùn)動(dòng)、公差仿真、柔性仿真三者耦合是當(dāng)前與未來懸架公差分析的一大挑戰(zhàn)。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
基于ADAMS的助老起升裝置的運(yùn)動(dòng)學(xué)仿真分析 
關(guān)鍵詞: 虛擬樣機(jī); ADAMS; 四連桿機(jī)構(gòu); 運(yùn)動(dòng)學(xué)仿真0 引 言 伴隨著社會(huì)的不斷進(jìn)步和發(fā)展,人口老齡化的問 題也在不斷加劇,并逐漸成為當(dāng)今社會(huì)的主要問題之 一。
2599 5
擺渡人張 ??? 2年前
三自由度機(jī)械臂運(yùn)動(dòng)學(xué)分析+仿真 
求關(guān)節(jié)角 對(duì)式子兩邊連續(xù)乘以A1-A2的逆矩陣,可得 讓上述公式中第一行第三列對(duì)應(yīng)相等,第二行第三列對(duì)應(yīng)相等可得: 3機(jī)器人模型建立 所設(shè)計(jì)的機(jī)器人由多個(gè)連桿機(jī)構(gòu)組成,其關(guān)節(jié)類型包括旋轉(zhuǎn)關(guān)節(jié)和移動(dòng)關(guān)節(jié)兩種。利用Matlab中機(jī)器人仿真工具箱Robotics Tool中Link和SerialLink兩個(gè)函數(shù)可建立機(jī)器人模型[] 。
3989
余俊煒 ??? 2年前
ANSYS workbench 四連桿運(yùn)動(dòng)學(xué)分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對(duì)有限元分析感興趣的工程師你會(huì)得到什么:1、學(xué)習(xí)四連桿機(jī)構(gòu)的三維模型處理2、學(xué)習(xí)四連桿機(jī)構(gòu)接觸相關(guān)的接觸設(shè)置3、學(xué)習(xí)多體動(dòng)力學(xué)分析步的建立4、學(xué)習(xí)四連桿機(jī)構(gòu)多體動(dòng)力學(xué)分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
2311
天空紀(jì)年xh ??? 1年前
大客車空調(diào)壓縮機(jī)懸置機(jī)構(gòu)優(yōu)化仿真 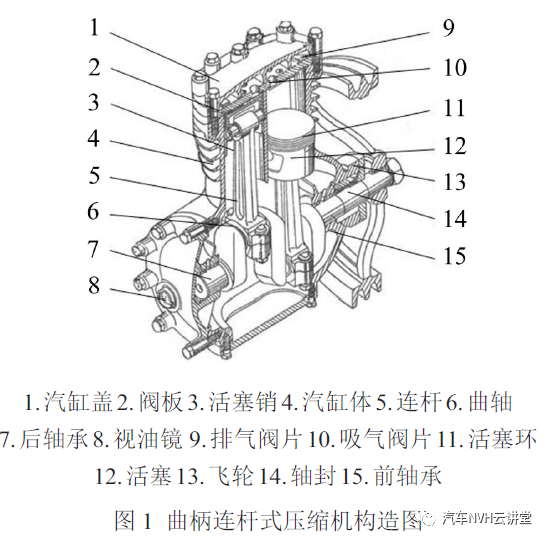
關(guān)鍵詞 :振動(dòng)與波;空調(diào)壓縮機(jī);懸置機(jī)構(gòu);動(dòng)力學(xué)仿真;大客車;解耦率 壓縮機(jī)是大客車空調(diào)系統(tǒng)核心部件,其中曲軸連桿式壓縮機(jī)由于制造技術(shù)成熟、結(jié)構(gòu)簡(jiǎn)單、對(duì)加工材料和加工工藝要求低、制冷量大等特點(diǎn)多應(yīng)用在大型客車上[1],如圖1所示。但其在工作過程中會(huì)有較大的振動(dòng),所以必須安裝有相應(yīng)的懸置機(jī)構(gòu)。
2854 5 1
我愛汽輪機(jī)仿真 ??? 2年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
仿真結(jié)果與理論運(yùn)動(dòng)學(xué)分析結(jié)果一致,lHJ 擺動(dòng)角范圍可達(dá)45.5°,可通過改變lHJ延伸桿lJK的長(zhǎng)度和曲柄lOF桿長(zhǎng)度來調(diào)節(jié)機(jī)體步幅大小。4 原型樣機(jī)搭建及行走試驗(yàn)圖9 所示為雙電機(jī)驅(qū)動(dòng)的六足直立式步行機(jī)器人。根據(jù)單側(cè)步行腿連桿機(jī)構(gòu)運(yùn)動(dòng)仿真模型,構(gòu)建另一側(cè)步行腿機(jī)構(gòu)模型進(jìn)行運(yùn)動(dòng)學(xué)仿真,結(jié)果表明,兩側(cè)步行腿連桿機(jī)構(gòu)的運(yùn)動(dòng)軌跡和測(cè)量曲線變化一致,仿真結(jié)果與理論運(yùn)動(dòng)學(xué)分析結(jié)果一致。
4178 7 8
仿真客 ??? 3年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
1.2 機(jī)器人手臂虛擬樣機(jī)的建立以應(yīng)用最為普遍的、具有最優(yōu)靈活工作空間的六自由度機(jī)器人手臂構(gòu)型作為產(chǎn)生按摩運(yùn)動(dòng)的載體。虛擬樣機(jī)的建立要盡可能地簡(jiǎn)化模型。在滿足虛擬樣機(jī)仿真運(yùn)動(dòng)要求的前提下,模型的零件數(shù)量應(yīng)該盡可能的少。保留主要的運(yùn)動(dòng)部件,忽略細(xì)化的部件。為了保證虛擬樣機(jī)的準(zhǔn)確性,各主要部件的空間布局應(yīng)該與物理樣機(jī)相當(dāng)。
3010 2
擺渡人張 ??? 2年前
ANSYS Workbench曲柄連桿齒輪機(jī)構(gòu)剛體動(dòng)力學(xué)分析 
剛體動(dòng)力學(xué) (RBD) 屬于經(jīng)典力學(xué),它利用牛頓運(yùn)動(dòng)定律求解 1D、2D 或 3D 空間中運(yùn)動(dòng)的剛體的運(yùn)動(dòng)。該項(xiàng)目是關(guān)于使用 ANSYS Workbench(機(jī)械)對(duì)連桿曲柄滑動(dòng)機(jī)構(gòu)進(jìn)行 RBD 分析。 ANSYS Mechanical 仿真文件供下載文件file.wbpz
2201
仿真資料吧 ??? 1年前
269 基于matlab的四連桿機(jī)構(gòu)動(dòng)力學(xué)參數(shù)計(jì)算 
基于matlab的四連桿機(jī)構(gòu)動(dòng)力學(xué)參數(shù)計(jì)算。將抽油機(jī)簡(jiǎn)化為4連桿機(jī)構(gòu),仿真出懸點(diǎn)的位移、速度、加速度、扭矩因數(shù)、游梁轉(zhuǎn)角等參數(shù),并繪出圖形。程序已調(diào)通,可直接運(yùn)行。
2210 1
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
【汽車知識(shí)】汽車懸掛系統(tǒng)竟然有這么多種,都是經(jīng)典的機(jī)構(gòu)設(shè)計(jì) 
7:多連桿懸掛 多連桿懸掛,就是通過各種連桿配置把車輪與車身相連的一套懸掛機(jī)構(gòu),其連桿數(shù)比普通的懸掛要多一些,一般把連桿數(shù)為三或以上的懸掛稱為多連桿懸掛。目前主流的連桿數(shù)為4或5根連桿。
2360 1
機(jī)械工程師 ??? 4年前
RecurDyn機(jī)器人仿真應(yīng)用及核心技術(shù)路線詳解 
以一個(gè)簡(jiǎn)單的二維空間中的兩連桿機(jī)械臂為例:</p><p><br></p><figure style="text-align: center;" class="ql-align-center">
<figure class="figure-image" contenteditable="false" data-img="https://img.jishulink.com/202601/attachment
2383 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
五自由度機(jī)械臂運(yùn)動(dòng)學(xué)分析(三轉(zhuǎn)動(dòng)+兩移動(dòng)自由度) 
利用Matlab中機(jī)器人仿真工具箱Robotics Tool中Link和SerialLink兩個(gè)函數(shù)可建立機(jī)器人模型[] 。其中,函數(shù)表達(dá)式如下:式中,theta為關(guān)節(jié)變量;d為偏置距離;alpha為扭轉(zhuǎn)角;a為連桿長(zhǎng)度;sigma表示關(guān)節(jié)類型(0為旋轉(zhuǎn)關(guān)節(jié),1為移動(dòng)關(guān)節(jié));前四個(gè)參數(shù)分別對(duì)應(yīng)表1中的,,,。
3035
余俊煒 ??? 3年前
懸架技術(shù)介紹上篇-傳統(tǒng)被動(dòng)懸架 
麥弗遜懸架形式的構(gòu)造簡(jiǎn)單,占用空間小,而且操縱性相較之前較好,而FF車型不僅要求發(fā)動(dòng)機(jī)要橫向放置,而且還要增加變速箱、差速器、驅(qū)動(dòng)機(jī)構(gòu)和轉(zhuǎn)向機(jī)等結(jié)構(gòu)部件,以往的前懸空間根本不足以滿足這種車型的要求。而麥弗遜式獨(dú)立懸架是由在下方的一個(gè)橫向擺臂+一個(gè)支柱組成,支柱本身就承擔(dān)了轉(zhuǎn)向軸的角色與羊角形成硬連接,因?yàn)榻Y(jié)構(gòu)簡(jiǎn)單,很大程度的節(jié)省了車頭機(jī)艙蓋內(nèi)的橫向空間。因此,麥弗遜式獨(dú)立懸架多用于汽車的前軸。
4663 1
EDC電驅(qū)未來 ??? 2年前
5種不常見的發(fā)動(dòng)機(jī),全見過的都是牛人! 
▲老式蒸汽機(jī)蒸汽機(jī)主要由汽缸、底座、活塞、曲柄連桿機(jī)構(gòu)、滑閥配汽機(jī)構(gòu)、調(diào)速機(jī)構(gòu)和飛輪等部分組成,汽缸和底座是靜止部分。▲蒸汽機(jī)結(jié)構(gòu)圖在蒸汽鍋爐中,通過燃燒使水沸騰為蒸汽,再通過管道蒸汽被送到汽缸。閥門控制蒸汽到達(dá)汽缸的時(shí)間,經(jīng)主氣閥和節(jié)流閥進(jìn)入滑閥室,受滑閥控制交替地進(jìn)入汽缸的左側(cè)或右側(cè),推動(dòng)活塞運(yùn)動(dòng)。
2505
技成電工課堂 ??? 4年前
基于精準(zhǔn)碰撞檢測(cè)算法的機(jī)械臂避障軌跡規(guī)劃 
仿真實(shí)驗(yàn)本文采用MATLAB 進(jìn)行實(shí)驗(yàn)仿真,主要使用MATLAB Robotics Toolbox工具箱和優(yōu)化工具箱進(jìn)行機(jī)械臂避障仿真實(shí)驗(yàn)。首先通過MATLAB Robotics Toolbox工具箱建立兩桿六自由度機(jī)械臂模型,設(shè)置兩連桿的長(zhǎng)度分別為 L1=L2=5?cmL1=L2=5?cm。
3494 6 3
機(jī)械設(shè)計(jì)師 ??? 4年前
20條/頁(yè) 
 13
13 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
