



軟體機器人超彈性材料本構賦予的兩種實現方式 
引言:超彈性材料是軟體機器人實現 “大變形、高回復、低剛度” 核心性能的關鍵載體,其力學行為需通過精準的本構模型描述。
3319 18 8
Abaqus_JUN ??? 7月前
ABAQUS-氣動驅動PneuNet結構軟體機器人仿真 

課程共分為三個章節:章節1-氣動驅動軟體機器人驅動原理與仿真分析方法章節2-基于Fluid Cavity加載方式的軟體機器人仿真流程章節3-基于Pressure加載方式的軟體機器人仿真流程
3764 6
Sunshine1516 ??? 3年前
【科技前沿】打印出行走的軟體機器人 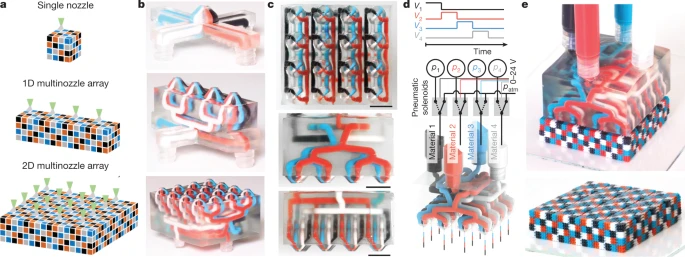
為了證明MM3D打印對打印對象的組成、結構及特性的空間編程能力,文章列舉了打印折紙機構以及氣動行走機器人的兩個例子。圖4 MM3D打印折紙圖5 打印行走軟體機器人展望未來,這種集成化的多材料打印噴頭將實現體素化功能性結構的快速打印,此外在打印分辨率和打印效率方面,定制化的打印墨水和打印結構的功能化同樣具有重要的研究和應用價值。
2209
機械工程師 ??? 3年前
《基于 RecurDyn 的四履帶足機器人運動學仿真》現已開放領取 
摘要: 應用多體動力學仿真分析軟件 RecurDyn 對四履帶足機器人進行全三維建模及越障過程仿真,并分析了履帶機器人行走過 程 中 的 力 學 模 型,仿真 結 果 動 態,準確的反映了四履帶足機器人行走機構的越障過程,驗證了四履帶足機器人行走機構較之雙履帶結構形式出色的越障能力,體現 了 RecurDyn 軟件在履帶機器人的動力學仿真分析方面的有效性和優越性 。1. 引言2.
2554
上海安世亞太 ??? 2年前
abaqus----帶限位圈約束的氣動軟體機器人仿真 
本人工科碩士在讀,此視頻是一個課程介紹,完整版從0--1對帶限位圈約束的氣動軟體機器人仿真的所有操作進行了全程錄屏教學,學者可快速精通此分析,按照Abaqus有限元分析流程對part、material、assembly、mesh、step、interaction、load等7個模塊進行了視頻精講,總課時24分鐘,此方向直接達到精通水平。提供永久免費答疑,有問題直接問。
CAE_xiaonuo ??? 2年前
六軸碼垛機器人admas正逆運動學仿真 
圖5-11 導入ADAMS的部件選擇 圖5-12 導入ADAMS的樣機模型 5.4 機器人運動學仿真 5.4.1 軌跡規劃 軌跡規劃即為求解機器人運動學逆解的過程。將機器人模型導入ADAMS后,首先是為機器人添加材料,本機器人結構為鋁合金。
2373
余俊煒 ??? 3年前
波士頓動力機器人,十年逆天史 
波士頓動力,應該是全世界,最知名的機器人公司了吧?其實他的機器人,也是一步步發展出來的。2009 PETMAN概念機,當時只能左右晃動,隨時跌倒的樣子,步行速度大概2公里每小時。
2467
機械學霸 ??? 3年前
[機器人學習]-樹莓派6R機械臂運動學分析 ![[機器人學習]-樹莓派6R機械臂運動學分析](https://img.jishulink.com/msimage/202212/724f9dd4ed1679d29341729d06ff291c.png?image_process=resize,fw_294,fh_172,)
1正運動學分析采用標準的D-h法進行機械腿模型分析:D-h表如下(2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
2561 1
余俊煒 ??? 3年前
六足機器人的Workbench動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。 
六足機器人的Workbench動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。
469 1
兵荒馬亂 ??? 6年前
機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。 
機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。
373
兵荒馬亂 ??? 7年前
機器鳥的Workbench動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。 
機器鳥(較復雜)的Workbench動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。
206
兵荒馬亂 ??? 6年前
【機器人仿真案例】基于RecurDyn Durability預測機器人夾爪疲勞壽命 
本案例基于多體動力學模型,對一款面向半導體物料搬運研發的專用機器人夾爪進行夾持力預測分析。同時,采用多柔體動力學(MFBD)技術開展耐久性分析,預測高應力區域的疲勞失效風險。通過該方法,可精準評估夾爪機構內部易損部件的使用壽命。
1430
杭州擬創(RecurDyn原廠) ??? 1月前
海克斯康領跑人形機器人研發 
通過建立人形機器人的多體動力學模型,研發人員可以詳細分析各關節的運動軌跡、速度和加速度,優化機器人的行走步態和動作流程,確保其運動的平穩性和靈活性。Adams軟件還提供了強大的動力學分析功能,能夠對人形機器人的各關節部件及連接進行受力分析。
3242 1 1
海克斯康設計與仿真 ??? 1年前
從"流浪地球"到ChatGPT,頂流機器人設計需要哪些仿真技術? 
為了讓機器人的工作表現達到預期目標,在設計階段就需要建立機器人的多體動力學數字樣機,來評估機器人的動力學、運動學特性。對于機器人整體,可以評估不同的控制策略;對于關鍵的承力部件,可以結合有限元仿真軟件完成剛-柔耦合分析。甚至還可以做一些拓撲優化,讓機器手臂的樣子更具未來感。 3、多體動力學仿真在機器人設計中起什么作用?
2114
安世亞太 ??? 3年前
機械工程中多體動力學的運用進展 
多體動力學在機器人領域的應用機器人也是我國研究較早的一項領域,但是傳統的機器人有一個特點就是動作非常的機械化,不夠靈敏。對機器人領域熟悉的人都知道,機器人主要由機械部分、傳感部分和控制部分組成。而機械部分主要是剛性座、手部、腕部、臂部和3個關節組成,這些組成在一起就是一個剛性多體系統,剛性多體系統的運動軌跡和自由度有一定的局限性,所以導致機器人的動作比較機械化。
2330 2 1
CAE仿真學習菌 ??? 2年前
RecurDyn機器人仿真應用及核心技術路線詳解 
</p><p><br></p><p><br></p><p><br></p><p><strong>機器人系統的動力學理論基礎</strong></p><p>機器人機構設計是機器人開發中的核心環節,其成功關鍵在于確保末端執行器能夠可靠、精確且耐久地完成預定任務。
2383 1
杭州擬創(RecurDyn原廠) ??? 4月前
行業新應用:電機驅動將成為機器人的動力核心 
一般而言,機器人首先需要電機驅動芯片具有更高的性能與更強的穩定性。機器人的工作環境復雜,特別是當其被應用于工廠生產活動中,有可能在高電壓、大電流的環境下工作,這對芯片本體的穩定性將有更高要求。另外,機器人的關節要完成高轉速、頻繁的正反轉,實現高自由度,對于電機與驅動芯片的性能也有更高要求,如此可以更加快速準確地完成轉矩的控制。
2258
如果我年少有為 ??? 2年前
工業機器人精度測量方案-激光跟蹤儀 
隨著工廠智能化轉型的深入,“無人工廠”、“黑燈工廠”不斷涌現,工廠車間“少人化”、“無人化”,取而代之的是大量工業機器人的應用,在此背景下,如何確保工業機器人空間位置精度,保障其準確運行變得十分關鍵。 工業機器人空間位置精度誤差主要分為運動學誤差和動力學誤差。
2819
深圳市中圖儀器股份有限公司 ??? 3年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
▎解決方案?使用專業的多體動力學軟件對由多個部件組成的機械手進行建模和動力學仿真?多柔體動力學是計算大變形線纜運動特性的必要手段?通過高精度的可視化和定量評估,可以檢測機器人機械臂的軌跡?一種包含剛體和柔性體之間摩擦的接觸算法▎結論?MFBD模型準確地再現了象鼻機器人機械手臂的動力學行為?采用MFBD模型進行優化,使其工作區域內的運動范圍達到最大?計算了線纜承受的精確載荷
3366
杭州擬創(RecurDyn原廠) ??? 4年前
碼垛機器人admas仿真 
機器人動力學仿真按照運動學仿真的類似步驟為機器人添加材料、運動副和關節驅動,給機器人手腕末端施加50N最大負載,仿真模型如圖5-17。
2276
余俊煒 ??? 3年前
20條/頁 
 78
78 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
