



基于模仿學(xué)習(xí)和強(qiáng)化學(xué)習(xí)的機(jī)械臂運(yùn)動(dòng)技能獲取 
設(shè)置了堆疊積木任務(wù)和 Pick and Place任務(wù),驗(yàn)證了本文RGBD-ID 方法、模仿學(xué)習(xí)模型和強(qiáng)化學(xué)習(xí)模型用于機(jī)械臂獲取運(yùn)動(dòng)技能的有效性和可行性。 圖3 機(jī)器人堆積木模仿學(xué)習(xí)過(guò)程 3、研究結(jié)論 針對(duì)機(jī)器人智能化的需求,進(jìn)行了基于模仿學(xué)習(xí)和強(qiáng)化學(xué)習(xí)的機(jī)械臂運(yùn)動(dòng)技能獲取的研究。
3352
機(jī)械設(shè)計(jì)師 ??? 4年前
強(qiáng)化學(xué)習(xí)的基礎(chǔ)知識(shí)和6種基本算法解釋 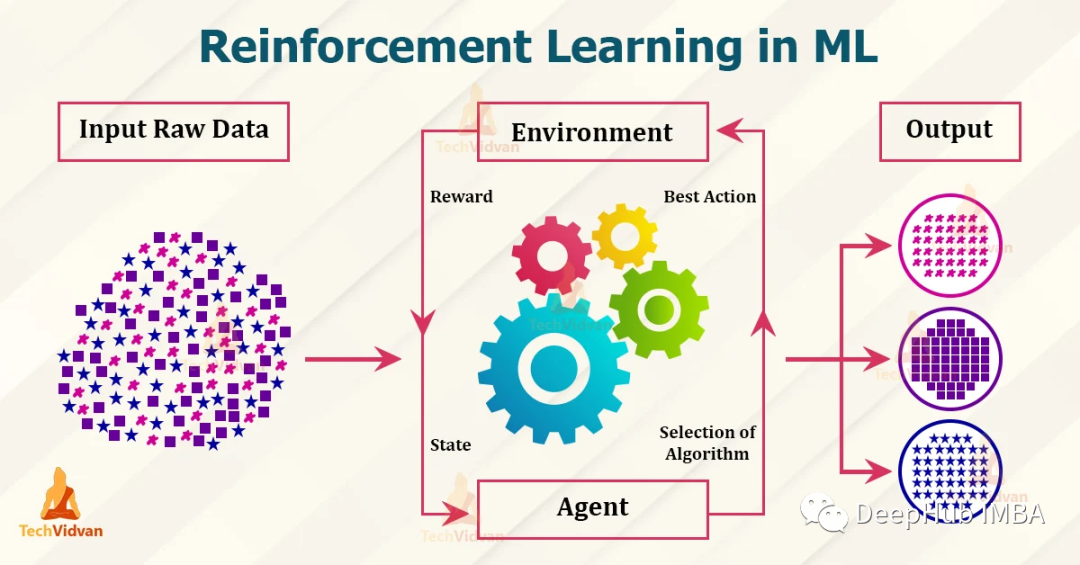
來(lái)源:DeepHub IMBA強(qiáng)化學(xué)習(xí)的基礎(chǔ)知識(shí)和概念簡(jiǎn)介(無(wú)模型、在線學(xué)習(xí)、離線強(qiáng)化學(xué)習(xí)等)機(jī)器學(xué)習(xí)(ML)分為三個(gè)分支:監(jiān)督學(xué)習(xí)、無(wú)監(jiān)督學(xué)習(xí)和強(qiáng)化學(xué)習(xí)。
2040 1
牛頓家的計(jì)算機(jī) ??? 3年前
基于模型的自動(dòng)駕駛汽車端到端深度強(qiáng)化學(xué)習(xí)策略 
3、世界模型 基于模型的方法主要在強(qiáng)化學(xué)習(xí)環(huán)境中進(jìn)行探索,這種方法實(shí)際是在完全離線狀態(tài)下強(qiáng)化學(xué)習(xí),并假設(shè)在與環(huán)境進(jìn)行在線交互中可以獲得獎(jiǎng)勵(lì)。基于模型的模仿學(xué)習(xí)已成為機(jī)器人操作和 OpenAI Gym 中強(qiáng)化學(xué)習(xí)的替代方案。盡管這些方法不需要獲得獎(jiǎng)勵(lì),但它們?nèi)匀恍枰c環(huán)境進(jìn)行在線交互才能獲得良好的性能。
3907 2 1
駕駛哥 ??? 2年前
一種優(yōu)化CFD網(wǎng)格的深度強(qiáng)化學(xué)習(xí)框架-MeshDQN 
當(dāng)前基于機(jī)器學(xué)習(xí)技術(shù)的網(wǎng)格生成和優(yōu)化技術(shù)通常需要大量的計(jì)算成本來(lái)生成訓(xùn)練數(shù)據(jù),并且在范圍上受限于訓(xùn)練數(shù)據(jù)流機(jī)制。為了解決上述問題,卡內(nèi)基梅隆研究團(tuán)隊(duì)開發(fā)了一個(gè)基于圖神經(jīng)網(wǎng)絡(luò)的通用深度強(qiáng)化學(xué)習(xí)(Deep Reinforcement Learning,DRL)框架,以不斷迭代的方式來(lái)優(yōu)化CFD的網(wǎng)格。
3322 1
網(wǎng)格大師 ??? 2年前
基于優(yōu)化嵌入強(qiáng)化學(xué)習(xí)的環(huán)島場(chǎng)景下自動(dòng)駕駛自適應(yīng)決策方法研究 
近年來(lái),強(qiáng)化學(xué)習(xí)以其獨(dú)特的與環(huán)境的交互能力和自學(xué)習(xí)能力在自動(dòng)駕駛決策問題上得到廣泛應(yīng)用。本文將強(qiáng)化學(xué)習(xí)方法應(yīng)用于環(huán)島駕駛場(chǎng)景,利用強(qiáng)化學(xué)習(xí)得到?jīng)Q策變量,然后輸入給下層非線性MPC控制器進(jìn)行跟蹤。仿真結(jié)果證明該方法具有較高計(jì)算效率和更好的性能。
3134
駕駛哥 ??? 4年前
自動(dòng)駕駛前沿綜述:基于深度強(qiáng)化學(xué)習(xí)的自動(dòng)駕駛算法 
強(qiáng)化學(xué)習(xí)(reinforcement Learning)強(qiáng)化學(xué)習(xí)(RL)是于 監(jiān)督學(xué)習(xí)(Sueprvised Learning)和非監(jiān)督學(xué)習(xí)(Unsupervised Learning)之外的第三種機(jī)器學(xué)習(xí)(Machine Learning)方式。RL 通過(guò)一個(gè)代理來(lái)完成行動(dòng)策略。代理的目標(biāo)是最大化在其生命周期內(nèi)收到的累積獎(jiǎng)勵(lì)。
2044
木火柴 ??? 4年前
一種新的四旋翼模擬器:Flightmare 
此外,F(xiàn)ligtmare相對(duì)以前的工作,擁有幾個(gè)有利的特性:一個(gè)適合大多數(shù)的機(jī)器人和機(jī)器學(xué)習(xí)應(yīng)用程序的大型傳感器套件,一個(gè)可以有效地并行模擬多個(gè)四旋翼并通過(guò)強(qiáng)化學(xué)習(xí)訓(xùn)練控制器的API,以及通過(guò)虛擬現(xiàn)實(shí)耳機(jī)與模擬器交互的可能性。
2493
無(wú)人機(jī)10086 ??? 4年前


人工智能 大數(shù)據(jù) 深度強(qiáng)化學(xué)習(xí) 
7.掌握常見的機(jī)器學(xué)習(xí)算法。 來(lái)源:www.chinaai.org.cn關(guān)注微信公眾號(hào)人工智能技術(shù)與咨詢了解更多!
2122
DSJ123 ??? 3年前
深度學(xué)習(xí)與大模型Transformer 
3.深度強(qiáng)化學(xué)習(xí)高頻問題:1.DNN 與DQN 2.探索與利用關(guān)鍵點(diǎn):1.深度強(qiáng)化學(xué)習(xí)的原理 2.根據(jù)實(shí)際需求,設(shè)計(jì)深度強(qiáng)化學(xué)習(xí)模型 實(shí)操解析與訓(xùn)練第九階段:圖卷積神經(jīng)網(wǎng)絡(luò)實(shí)踐 實(shí)驗(yàn):社交網(wǎng)絡(luò)分析1.圖神經(jīng)網(wǎng)絡(luò)的原理 2.圖卷積神經(jīng)網(wǎng)絡(luò)的思想3.設(shè)計(jì)圖卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行社交網(wǎng)絡(luò)分析
2115 2 1
龍騰AI技術(shù) ??? 2年前
ABAQUS 單個(gè)噴丸強(qiáng)化分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對(duì)有限元分析感興趣的工程師你會(huì)得到什么:1、掌握噴丸三維模型的繪制2、掌握顯示動(dòng)力學(xué)分析相關(guān)的材料參數(shù)設(shè)置3、理解顯示動(dòng)力學(xué)分析步的建立4、學(xué)習(xí)噴丸強(qiáng)化分析的相互關(guān)系的設(shè)置5、了解顯示動(dòng)力學(xué)網(wǎng)格的劃分6、學(xué)習(xí)結(jié)果后處理的查看與對(duì)比案例介紹:所使用軟件為ABAQUS2018
1682
天空紀(jì)年xh ??? 1年前
ABAQUS 多個(gè)噴丸強(qiáng)化分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對(duì)有限元分析感興趣的工程師你會(huì)得到什么:1、掌握噴丸三維模型的繪制2、掌握顯示動(dòng)力學(xué)分析相關(guān)的材料參數(shù)設(shè)置3、理解顯示動(dòng)力學(xué)分析步的建立4、學(xué)習(xí)噴丸強(qiáng)化分析的相互關(guān)系的設(shè)置5、了解顯示動(dòng)力學(xué)網(wǎng)格的劃分6、學(xué)習(xí)結(jié)果后處理的查看與對(duì)比案例介紹:所使用軟件為ABAQUS2018
2127
天空紀(jì)年xh ??? 1年前
人工智能 深度學(xué)習(xí) 
根據(jù)需求學(xué)會(huì)設(shè)計(jì)生成模型與判別模型實(shí)操解析與訓(xùn)練第八階段:強(qiáng)化學(xué)習(xí)實(shí)踐 實(shí)驗(yàn):游戲分析1. 游戲場(chǎng)景分析 2. 強(qiáng)化學(xué)習(xí)的要素分析 3. 深度強(qiáng)化學(xué)習(xí)高頻問題:1.DNN 與 DQN 2. 探索與利用關(guān)鍵點(diǎn):1. 深度強(qiáng)化學(xué)習(xí)的原理 2. 根據(jù)實(shí)際需求,設(shè)計(jì)深度強(qiáng)化學(xué)習(xí)模型實(shí)操解析與訓(xùn)練第九階段:圖卷積神經(jīng)網(wǎng)絡(luò)實(shí)踐 實(shí)驗(yàn):社交網(wǎng)絡(luò)分析1.
2097 1 1
DSJ123 ??? 3年前
深度學(xué)習(xí)驅(qū)動(dòng)的流體力學(xué)計(jì)算 
3、 理解深度強(qiáng)化學(xué)習(xí)中動(dòng)作空間與觀察空間的定義與應(yīng)用。
2384
hdpky ??? 2年前
深度學(xué)習(xí)驅(qū)動(dòng)的流體力學(xué)計(jì)算與應(yīng)用 
3、 理解深度強(qiáng)化學(xué)習(xí)中動(dòng)作空間與觀察空間的定義與應(yīng)用。
2212
hdpky ??? 2年前
【基于openfoam&fluent深度學(xué)習(xí)算法驅(qū)動(dòng)的流體力學(xué)設(shè)計(jì)與應(yīng)用】專題 
掌握基于多層感知機(jī)(MLP)的氣動(dòng)性能預(yù)測(cè)方法基于多層感知機(jī)(MLP)的民航超臨界機(jī)翼氣動(dòng)性能預(yù)測(cè)基于LES/DNS湍流模擬的時(shí)空超分辨率研究基于深度學(xué)習(xí)的流場(chǎng)時(shí)序超分辨率處理基于深度強(qiáng)化學(xué)習(xí)的矩形柱體主動(dòng)流動(dòng)控制運(yùn)用深度強(qiáng)化學(xué)習(xí)進(jìn)行離散動(dòng)作空間/連續(xù)動(dòng)作空間的優(yōu)化耦合代理模型的深度強(qiáng)化學(xué)習(xí)在民航飛機(jī)外形優(yōu)化中的應(yīng)用前沿文獻(xiàn)的解讀,如SORA技術(shù)、風(fēng)烏技術(shù)等
2638
用戶_43283 ??? 1年前
深度學(xué)習(xí)核心技術(shù)實(shí)踐與圖神經(jīng)網(wǎng)絡(luò)新技術(shù)應(yīng)用研修班通知 
3.深度強(qiáng)化學(xué)習(xí)高頻問題:1.DNN 與DQN 2.探索與利用關(guān)鍵點(diǎn):1.深度強(qiáng)化學(xué)習(xí)的原理 2.根據(jù)實(shí)際需求,設(shè)計(jì)深度強(qiáng)化學(xué)習(xí)模型 實(shí)操解析與訓(xùn)練第九階段:圖卷積神經(jīng)網(wǎng)絡(luò)實(shí)踐 實(shí)驗(yàn):社交網(wǎng)絡(luò)分析1.圖神經(jīng)網(wǎng)絡(luò)的原理 2.圖卷積神經(jīng)網(wǎng)絡(luò)的思想3.設(shè)計(jì)圖卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行社交網(wǎng)絡(luò)分析
1986 2 1
龍騰AI技術(shù) ??? 3年前
17個(gè)機(jī)器學(xué)習(xí)的常用算法
強(qiáng)化學(xué)習(xí):在這種學(xué)習(xí)模式下,輸入數(shù)據(jù)作為對(duì)模型的反饋,不像監(jiān)督模型那樣,輸入數(shù)據(jù)僅僅是作為一個(gè)檢查模型對(duì)錯(cuò)的方式,在強(qiáng)化學(xué)習(xí)下,輸入數(shù)據(jù)直接反饋到模型,模型必須對(duì)此立刻作出調(diào)整。常見的應(yīng)用場(chǎng)景包括動(dòng)態(tài)系統(tǒng)以及機(jī)器人控制等。常見算法包括Q-Learning以及時(shí)間差學(xué)習(xí)(Temporal difference learning)5.
2385 1
王者歸來(lái)123 ??? 3年前
【深度學(xué)習(xí)驅(qū)動(dòng)的流體力學(xué)計(jì)算與應(yīng)用】專題 
基于深度學(xué)習(xí)的流場(chǎng)時(shí)序超分辨率處理基于深度強(qiáng)化學(xué)習(xí)的矩形柱體主動(dòng)流動(dòng)控制運(yùn)用深度強(qiáng)化學(xué)習(xí)進(jìn)行離散動(dòng)作空間/連續(xù)動(dòng)作空間的優(yōu)化耦合代理模型的深度強(qiáng)化學(xué)習(xí)在民航飛機(jī)外形優(yōu)化中的應(yīng)用前沿文獻(xiàn)的解讀,如SORA技術(shù)、風(fēng)烏技術(shù)等,了解人工智能技術(shù)在流體力學(xué)領(lǐng)域的最新進(jìn)展,保持學(xué)術(shù)前沿性可在某公某號(hào)咨詢:研而有信er (加關(guān)后有聯(lián)系方式可詳詢)
2143
用戶_43283 ??? 2年前
通過(guò)構(gòu)建真實(shí)世界的應(yīng)用程序、API和工具來(lái)學(xué)習(xí)Go編程
- 課程涵蓋內(nèi)容: - 機(jī)器學(xué)習(xí)、人工智能與神經(jīng)網(wǎng)絡(luò)入門 - 有監(jiān)督、無(wú)監(jiān)督和強(qiáng)化學(xué)習(xí)技術(shù) - 神經(jīng)網(wǎng)絡(luò)、深度學(xué)習(xí)和模型優(yōu)化 - 實(shí)用人工智能應(yīng)用和真實(shí)世界用例 - 理解人工智能系統(tǒng)如何學(xué)習(xí)、適應(yīng)和改進(jìn) - 構(gòu)建可擴(kuò)展人工智能解決方案的工具和最佳實(shí)踐 - 適用人群: - 沒有任何人工智能或機(jī)器學(xué)習(xí)經(jīng)驗(yàn)的初學(xué)者
1013 1
仿真資料吧 ??? 4月前
20條/頁(yè) 
 12
12 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
