



行業(yè)案例 | MBSE解決方案(四):基于SysML的武器裝備系統(tǒng)建模與驗證 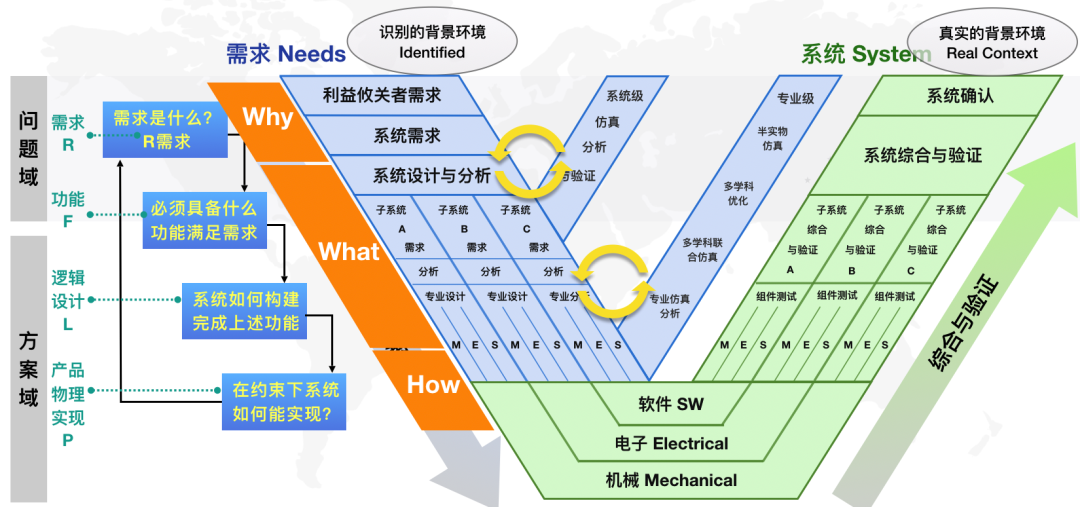
在該案例中,使用參數(shù)圖定義設備元素的性能指標之間的數(shù)學模型,用于后續(xù)的系統(tǒng)性能指標驗證。通過參數(shù)建模,定義每一個結構中所包含的輸入變量、約束表達式和輸出變量之間的數(shù)學關系。
7778 4 2
一起學MBSE ??? 2年前
案例分享: Mercedes-AMG的虛擬驗證計劃如何推動車輛動力學的開發(fā) 
結合動態(tài)模型配置、聯(lián)合仿真和具備實時能力的輪胎模型,Mercedes-AMG能夠實現(xiàn)自動化驗證,減少對物理原型的依賴,加快開發(fā)進程,同時保持高仿真精度。 ?? 感興趣嗎?掃描下方客服二維碼,回復【VI-grade案例0304】免費獲取完整案例!
2332 1
技術鄰公告 ??? 2月前
案例分享: Mercedes-AMG的虛擬驗證計劃如何推動車輛動力學的開發(fā) 
結合動態(tài)模型配置、聯(lián)合仿真和具備實時能力的輪胎模型,Mercedes-AMG能夠實現(xiàn)自動化驗證,減少對物理原型的依賴,加快開發(fā)進程,同時保持高仿真精度。??感興趣嗎?請閱讀以下完整案例研究!
2677 3 1
VI-grade中國 ??? 2月前
【CAE案例】鋼筋混凝土結構的非線性地震分析的建模和實驗驗證 
01 案例背景為了滿足評估地震載荷對土木工程性能影響的需求,SEPTEN與EDF研發(fā)部門合作,開展了一項關于模擬鋼筋混凝土結構的研究與開發(fā)計劃。該項目的重要貢獻是開發(fā)了交替循環(huán)載荷下的兩種鋼筋混凝土模型:2D各向異性的Nada?_B模型,與3D各向同性Endo_Isot_Béton模型。
4478
CAE璐姐 ??? 2年前
行業(yè)案例 | MBSE解決方案(一):面向裝備系統(tǒng)論證和方案階段研制的協(xié)同設計和驗證平臺 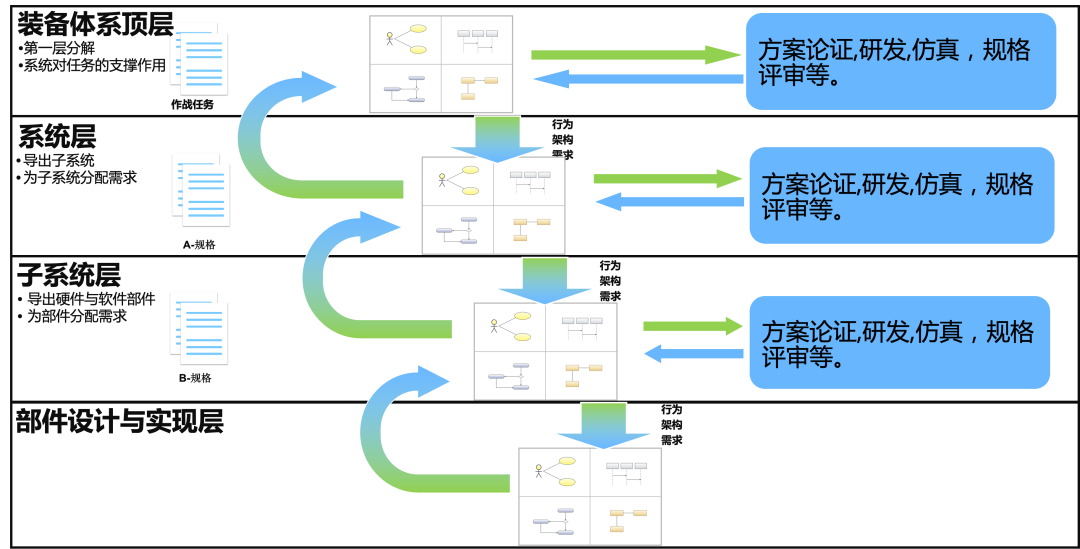
圖 3 索為/杉石MBSE自主工具鏈 3 案例應用 圍繞武器裝備(對空防御導彈系統(tǒng))作為典型案例,應用協(xié)同設計和驗證平臺中的幾個核心工具開展了MBSE應用,形成系列化的文章
6664 2 2
一起學MBSE ??? 2年前
WB驗證案例105:重力載荷下鐘擺的運動 
其實驗證案例都是根據(jù)課本或者一些論文里的案例來的,并不是腦袋一拍ANSYS團隊自己想出來的,都是有出處的。但是畢竟是國外的軟件,人家也不可能借鑒咱們中國的書,所以我也一直沒有寫。今天特地還去找了一下這個案例的參考教程,奈何沒找到電子書,只有亞馬遜上有賣。如果有小伙伴有渠道可以找到國外電子版的書,可以后臺私聊我一下。如果能找到,以后我盡量把參考文獻的那幾頁也分享給大家。
1990
Love無劍 ??? 4年前
WB驗證案例107:支撐懸掛荷載 
模型鏈接回復 幫助文檔,進去WB驗證案例文件夾,可根據(jù)對應的案例號找到對應的模型文件夾,下載該文件夾即可。
3071 5 3
Love無劍 ??? 4年前
ANSYS Fluent驗證案例:軸流壓縮機 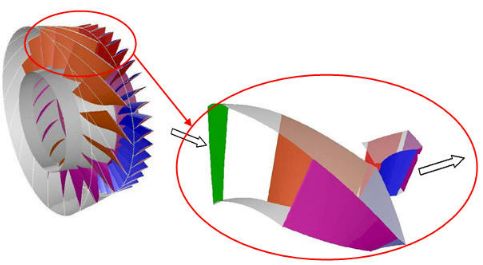
本案例計算單級軸流壓縮機內部流場,并驗證出口壓力及流量。1 問題描述計算模型如圖所示。采用單個轉子葉片與單個定子葉片進行計算,利用旋轉參考系模型模擬轉子的轉動,計算參數(shù)如表所示。采用穩(wěn)態(tài)、湍流計算,考慮氣體的可壓縮性,利用理想氣體模型計算密度。
3316
我愛汽輪機仿真 ??? 2年前
【CAE案例】城市峽谷效應下污染物傳輸流參數(shù)化方法的驗證 
本文比較了不同MUNICH下的參數(shù)化方法,并與CFD仿真計算結果在風速以及示蹤粒子濃度的分布情況上進行對比,從而驗證了參數(shù)化方法的可行性。
4556 7 4
CAE璐姐 ??? 2年前
SimSolid精度驗證與實際案例分析網(wǎng)絡研討會 

本場研討會將為您介紹:1.SimSolid 超快速建模分析演示;2.不同分析精度收斂性驗證;3.案例操作演示:車架、鑄造件、前機蓋等;4.模型精度設置與有限元對標。
116
ALTAIR ??? 9月前
Python實戰(zhàn)案例,cv2模塊,Python識別圖形驗證碼實現(xiàn)自動登陸! 
到登陸界面后,利用selenium自動輸入用戶名,密碼,對驗證碼區(qū)域進行截圖。而后對驗證碼截圖進行處理,最后成功獲取驗證碼。這里為什么是截圖呢,原因是驗證碼圖片一直在變化。比如說我現(xiàn)在復制這個8863驗證碼的圖片鏈接,在新的標簽頁打開,會發(fā)現(xiàn)驗證碼改變了,不是8863,而是另外一張驗證碼圖片。
2266 1
他說Python ??? 4年前
后向臺階CFD模擬和驗證案例(UDF) 
1.4 Two Dimensional Backward Facing CFD tutorial_DM_ICEMCFD_Fluent.pptx1.3 refernce 1back_step_data_bank.pdf1.后向臺階CFD模擬和驗證.mp4(英文)
2407 2 1
仿真資料吧 ??? 1年前
RecurDyn成功案例:多履帶式城市偵察機器人虛擬驗證 
開發(fā)該形式的偵察機器人的一個研究小組利用RecurDyn的履帶工具包,輕松地對包含復雜履系統(tǒng)的機器人進行建模,并利用它有效地驗證了爬樓梯性能。
4322
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
WB驗證案例106:重力載荷下鐘擺的運動 
點擊上方藍字關注我們 1.案例描述鐘擺由固定桿 L 和連接在自由端的質量B組成。系統(tǒng)在垂直平面中移動,作用在質量上的唯一力是地球的引力和施加在桿上的力。系統(tǒng)中的傳感器測量角度0和產生信號。信號作為A處電機的輸入,使Mbar=-Kθ(t),其中K=4 Nm/rad。確定桿的最小和最大相對旋轉。
2757 3 3
Love無劍 ??? 4年前
2024年RecurDyn優(yōu)秀案例競賽作品分享:核探測機器人底盤設計與越障性能仿真驗證 
3.1 上下坡性能仿真分析 由于之前已經(jīng)驗證過虛擬樣機模型的正確性,這里將直接對機器人爬坡性能進行驗證,這里采取硬質路面為坡道路面,路面角度根據(jù)設計指標要求設為30°,機器人驅動函數(shù)采取STEP增量式驅動,其函數(shù)形式為: STEP(TIME,0.5,0,1,0.95*pi)+ STEP(TIME,12,0.95*pi,14,0.7*pi) 其中0.5~1秒為加速階段,1~12秒為勻速階段
2553
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
超大跨鋼管混凝土拱橋 ANSYS APDL 精細化建模案例介紹 
案例概述本案例展示了一個基于 ANSYS APDL 的超大跨鋼管混凝土拱橋有限元建模與分析過程。橋梁主跨超過 400 米,模型采用雙單元法(Double-Element Method),以簡化且合理的方式模擬鋼管混凝土拱橋在彈性階段的整體受力與剛度特性。模型經(jīng)過充分驗證,可一次性完成恒載分析并順利收斂,結果穩(wěn)定可靠,可作為工程參考和教學示例的基礎模型。
5096 2 2
YHT_CAE ??? 6月前
Moldex3D模流分析之結合Moldex3D和ANSYS驗證玻纖對聚乳酸產品結構的影響 
本案例中,玻纖濃度為25%時產品變形量至低(圖五)。圖五 不同玻纖比率的翹曲變形結果接下來用ANSYS來驗證Moldex3D的翹曲和應力分析,二者的結果非常相近(圖六)。圖六 Moldex3D和ANSYS的模擬結果驗證結果從Moldex3D的使用經(jīng)驗中可獲知,在不同變量下,纖維對產品的影響都能夠有效預測。
3938
Moldex3D 中國 ??? 3年前
ANSYS APDL斜拉橋精細化建模與仿真分析案例 
小結本案例為橋梁工程師、研究人員及學生提供了一套“開箱即用+靈活擴展”的斜拉橋仿真工具,助力從概念設計到施工優(yōu)化的全流程決策。無論是快速驗證設計方案,還是深入探索結構非線性行為,均可基于此模型高效實現(xiàn)。分項案例如下:如果是其他平臺也可以用hypermesh導入導出abaqus平臺等。
4412 4 1
YHT_CAE ??? 9月前
【CAE案例】利用三維水動力仿真優(yōu)化小型水電廠進水渠道 
04 模型驗證A. 水位驗證在中等流量工況下,河段的水位線很平坦,因此模型驗證的信息量不大。在大流量工況下,通過將摩擦系數(shù)設置為0.01m,Caderousse案例的實測水位線與模擬計算水位線吻合度高。B. ADCP測量驗證ARTELIA的工程師將三維水動力仿真模型計算結果與兩個小型水電站入口附近Rh?ne河的ADCP流量測量結果進行了對比驗證。
2378
CAE璐姐 ??? 2年前
肋環(huán)型網(wǎng)殼結構 ANSYS 參數(shù)化建模與自動出圖案例介紹 
案例總結肋環(huán)型網(wǎng)殼結構在空間結構體系中具有代表性,其幾何特征復雜、參數(shù)多、建模過程繁瑣。本案例通過 APDL 參數(shù)化編程方法,實現(xiàn)了從幾何定義、單元生成到結果出圖的自動化流程,大幅提升了建模效率與分析便捷性。該模型既可作為快速驗證結構可行性的小工具,也可作為進一步進行屈曲分析、穩(wěn)定性研究和二次開發(fā)的基礎模板。
3697 2
YHT_CAE ??? 6月前
20條/頁 
 74
74 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
