



ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
在錐形繞射的情況下,入射光線不垂直於光柵,偏振特徵態(tài)定義如下:圖3.全像在Kogelnik的耦合波理論中,全像被認為足夠厚,每條入射光線要不是直接以0階通過,不然就是1階繞射,對於反射和透射的全像都是如此。假設(shè)和限制Kogelnik的耦合波理論與其他理論相比具有優(yōu)勢,可以準確預(yù)測體積相位光柵的零階和一階效率的響應(yīng)。
2122
w**elab86_Swsp ??? 3年前
【帶傳動專欄】基于RecurDyn 的人字齒同步帶齒廓齒形對傳動性能的影響 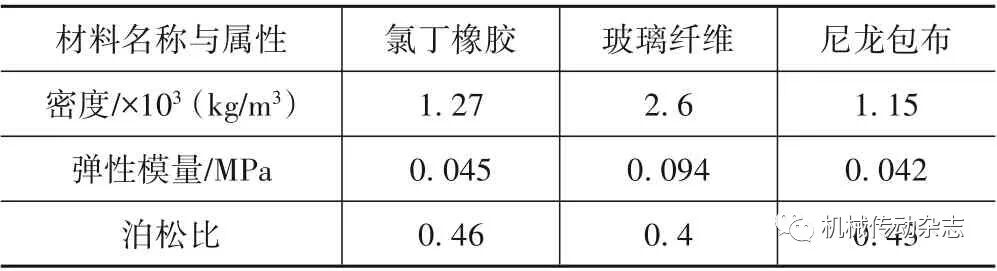
本文中基于剛?cè)狁詈隙囿w系統(tǒng)動力學理論,通過柔性多體動力學軟件Recur?dyn 對新型、RU 型和ZA 型人字齒同步帶3 種代表性的齒形進行虛擬樣機傳動建模和動力學性能對比研究,探討了人字齒同步帶齒形對傳動性能的影響,為工程應(yīng)用開發(fā)提供了理論依據(jù)。1 人字齒同步帶系統(tǒng)模型建立同步帶由復(fù)合材料構(gòu)成,材料屬性參數(shù)如表1所示。
2751 2 2
CAE仿真學習菌 ??? 2年前
RecurDyn成功案例:利用虛擬模型對諧波齒輪傳動性能進行預(yù)測 
應(yīng)變波齒輪利用橢圓形變形的柔性輪 (Flex Spline)和圓形Circular Spline之間的齒數(shù)差異,能在非常小、輕的結(jié)構(gòu)中達到很高的減速比,多用于機器人等小型、高精度產(chǎn)品。應(yīng)變波齒輪是在高速工作的過程中,柔性輪變形為橢圓形,從而使齒輪齒間發(fā)生接觸的機制,因此很難通過現(xiàn)有的有限元方法(FEA)再現(xiàn)問題。
2436
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn成功案例:鼓式制動系統(tǒng)的噪聲和振動分析 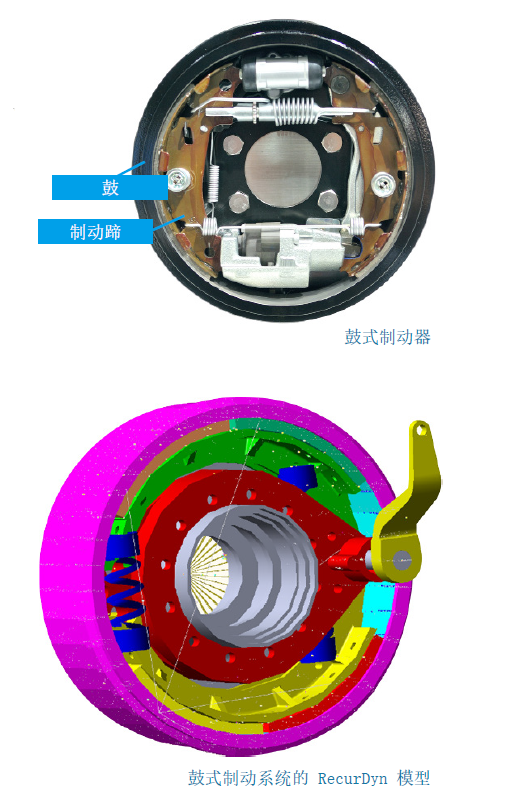
鼓式制動器廣泛應(yīng)用于卡車、公共汽車和一些乘用車,利用連接到車軸或懸架的半圓形制動蹄與安裝在車輪上的圓柱形鼓內(nèi)側(cè)的摩擦使車輛減速。蹄與鼓之間的摩擦系數(shù)是一個可調(diào)特性,它影響制動性能和制動器的振動特性。較高的摩擦系數(shù)降低了作用在制動蹄上所需的力,但它也增加了振動并降低了制動系統(tǒng)的穩(wěn)定性。
2210 1 5
仿真客 ??? 3年前
RecurDyn成功案例:鼓式制動系統(tǒng)的噪聲和振動分析 
鼓式制動器廣泛應(yīng)用于卡車、公共汽車和一些乘用車,利用連接到車軸或懸架的半圓形制動蹄與安裝在車輪上的圓柱形鼓內(nèi)側(cè)的摩擦使車輛減速。蹄與鼓之間的摩擦系數(shù)是一個可調(diào)特性,它影響制動性能和制動器的振動特性。較高的摩擦系數(shù)降低了作用在制動蹄上所需的力,但它也增加了振動并降低了制動系統(tǒng)的穩(wěn)定性。
2469 2 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
RecurDyn成功案例:鼓式制動系統(tǒng)的噪聲和振動分析 
鼓式制動器廣泛應(yīng)用于卡車、公共汽車和一些乘用車,利用連接到車軸或懸架的半圓形制動蹄與安裝在車輪上的圓柱形鼓內(nèi)側(cè)的摩擦使車輛減速。蹄與鼓之間的摩擦系數(shù)是一個可調(diào)特性,它影響制動性能和制動器的振動特性。較高的摩擦系數(shù)降低了作用在制動蹄上所需的力,但它也增加了振動并降低了制動系統(tǒng)的穩(wěn)定性。
2389 4 2
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
RecurDyn經(jīng)典案例:象鼻機器人機械臂的優(yōu)化設(shè)計 
▎仿真過程① 創(chuàng)建由象鼻形狀的體組成的象鼻機器人機械臂柔性體模型,它由圓盤、電纜、底座和柔性軸組成的象鼻形身體組成② 使用用戶定義的運動對安裝在象鼻底部的執(zhí)行器和直流電機進行數(shù)學建模③ 研究了機器人機械臂在工作區(qū)域內(nèi)可以達到的運動范圍④ 計算并比較了不同材料(尼龍、聚四氟乙烯)操作過程中電纜的強度⑤ 計算運行期間電纜承受的荷載⑥ 計算運行期間電纜與圓盤接觸時所承受的摩擦載荷
3366
杭州擬創(chuàng)(RecurDyn原廠) ??? 4年前
ZEMAX軟件技術(shù)應(yīng)用專題:用於數(shù)位元投影光學中均勻照明的陣列透鏡 (蒼蠅眼) 
陣列中每個單獨的光學元件的形狀可以是正方形或矩形。單個光學元件的表面形狀可以是球面或變形(垂直和水準子午線的光焦度不同)。光焦度通常僅在陣列的一個表面上,而第二個表面通常是平面的。在 OpticStudio 中對此設(shè)置進行建模的最簡單方法之一是使用陣列物件 (array object)。
2002
w**elab86_Swsp ??? 3年前
Moldex3D模流分析之Tokyo Seiki公司使用模流大幅減少試模次數(shù) 
以 DVD 光碟機的內(nèi)部機構(gòu)件為例,除了平整度的要求外,由於原始設(shè)計的流道重於成品體積(20g:16g),而客戶要求 Tokyo Seiki 減輕流道重量,經(jīng)過五次的變更設(shè)計分析,流動指數(shù)的比較為 88%:99%,流道與成品體積比較為 10g:16g。
2210
Moldex3D 中國 ??? 3年前
基于RecurDyn的多工況下的尼龍蝸輪疲勞性能研究 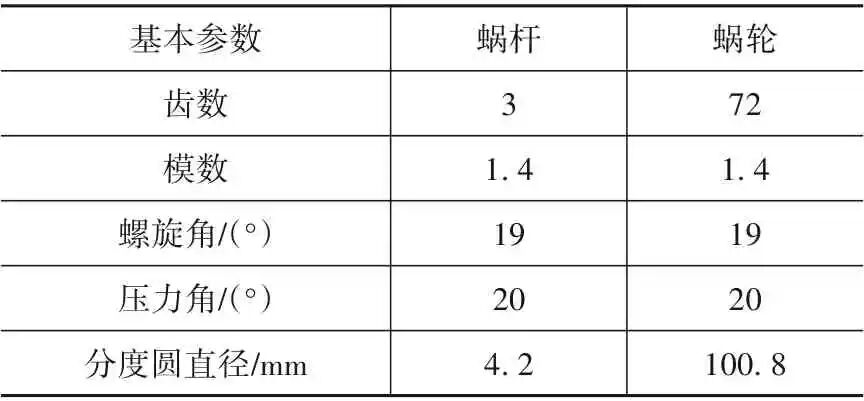
國內(nèi)外學者對蝸輪蝸桿進行了一系列研究,主要針對齒形的優(yōu)化和接觸強度的分析,而蝸輪的疲勞性能研究通常采用臺架試驗的方法[6-8],對蝸輪多工況動態(tài)加載下的疲勞壽命理論研究欠缺。
3022 1 1
仿真客 ??? 3年前
Ansys Zemax光學設(shè)計軟件技術(shù)教程:眼科鏡片設(shè)計 
在Layout中我們可以看到一個傳統(tǒng)的眼科半月形鏡片,這個基本曲線是個常見的形狀。然而,這個結(jié)論是根據(jù)我們的設(shè)計流程而來的,基於平面入射波、視場角與其權(quán)重、透鏡與眼睛旋轉(zhuǎn)中心的距離、一些像差的忽略 (尤其是對畸變的忽略),以及其他更多的假設(shè)。在一般的認知中,以上的方法並不能產(chǎn)生具有“最佳形態(tài)”或是“校正曲線”的透鏡,意思是無法製造出能完美修正像差,同時又可配合所有鏡片屈光率的微小基本曲線半徑。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:在 OpticStudio 中模擬高階雷射光束 
圖 3 很好地證明了這種轉(zhuǎn)變Bandres 和 Gutiérrez-Vega 的論文:2作者直接提供的另一個圖也顯示了這種轉(zhuǎn)變(對於 p = 4):2當 e 接近 0 時,Ince-Gaussian DLL 準確地再現(xiàn)了 Laguerre-Gaussian 模態(tài)的結(jié)果。
2057
w**elab86_Swsp ??? 3年前
仿真案例|使用多體動力學軟件仿真柔性可卷太陽能電池陣列的展開過程 
多體動力學軟件(RECURDYN軟件)為柔性航天器結(jié)構(gòu)展開過程仿真提供了一個理想的研發(fā)平臺。 模型綜述一個典型的狹縫可卷支撐管如下圖1所示。這些支撐管由金屬或復(fù)合材料制成。對于航天器應(yīng)用,發(fā)射前的卷繞結(jié)構(gòu)中,支撐管材料被卷在一個圓柱軸上。展開過程中,材料展開,應(yīng)變能促使形成管狀結(jié)構(gòu)。圖1顯示了用于航天器應(yīng)用的狹縫可卷支撐管。當狹縫管展開時,應(yīng)變能使支撐管變成管狀結(jié)構(gòu)。
2168
上海安世亞太 ??? 4年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時間用戶分析 
LiDAR(光探測和測距)是一種感測器技術(shù),可通過測量發(fā)射光從周圍物體反射並返回到接收器所需的時間來幫助創(chuàng)建環(huán)境的3D數(shù)字地圖。這種3D映射作為自動駕駛汽車的關(guān)鍵使能技術(shù)在汽車行業(yè)變得越來越重要。在汽車行業(yè)之外,LiDAR用於移動設(shè)備,用於增強現(xiàn)實、測量距離以及模糊照片和影片中的背景等功能。
2080
w**elab86_Swsp ??? 3年前
負體積(節(jié)點速度無限大)解決辦法 
</p><p> </p><p>QQ::</p><p>負體積是由於element本身產(chǎn)生大變形造成自我體積的內(nèi)面跑到外面接著被判讀為負體積,</p><p>控制使element不出現(xiàn)不合理變形的方法就如同dragonwen與ayke所說的幾點,注意使Hourglassing情形減少,有以下幾個方法可以試看看</p><p>1.避免單點loading=&gt;不要將force施在單一node
5442 9
不問出處 ??? 1年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
