



OptiSystem-系統(tǒng)角度下分析色散補償方案 
在這種情況下,我們選擇了后補償方案,因為它比對稱補償方案簡單。 圖 6: 利用DCM實現(xiàn)色散補償 SMF的總累積色散為16×120=1920 ps/nm。我們將FBG的總色散范圍從-30掃到-3000ps/nm。比特率設(shè)置為10 Gbps。在這個模擬中,我們要研究系統(tǒng)的色散限制性能。為了避免觸發(fā)光纖非線性,我們將接收功率保持在-3dbm。
2350
追光ing ??? 1年前
OptiSystem-系統(tǒng)角度下分析色散補償方案 
在這種情況下,我們選擇了后補償方案,因為它比對稱補償方案簡單。 圖 6: 利用DCM實現(xiàn)色散補償 SMF的總累積色散為16×120=1920 ps/nm。我們將FBG的總色散范圍從-30掃到-3000ps/nm。比特率設(shè)置為10 Gbps。在這個模擬中,我們要研究系統(tǒng)的色散限制性能。為了避免觸發(fā)光纖非線性,我們將接收功率保持在-3dbm。
2424
追光ing ??? 2年前
OptiSystem-系統(tǒng)角度下分析色散補償方案 
在這種情況下,我們選擇了后補償方案,因為它比對稱補償方案簡單。 圖 6: 利用DCM實現(xiàn)色散補償 SMF的總累積色散為16×120=1920 ps/nm。我們將FBG的總色散范圍從-30掃到-3000ps/nm。比特率設(shè)置為10 Gbps。在這個模擬中,我們要研究系統(tǒng)的色散限制性能。為了避免觸發(fā)光纖非線性,我們將接收功率保持在-3dbm。
1720
信光嗎 ??? 9月前
OptiSystem-系統(tǒng)角度下分析色散補償方案
在這種情況下,我們選擇了后補償方案,因為它比對稱補償方案簡單。 圖 6: 利用DCM實現(xiàn)色散補償 SMF的總累積色散為16×120=1920 ps/nm。我們將FBG的總色散范圍從-30掃到-3000ps/nm。比特率設(shè)置為10 Gbps。在這個模擬中,我們要研究系統(tǒng)的色散限制性能。為了避免觸發(fā)光纖非線性,我們將接收功率保持在-3dbm。
1790
追光ing ??? 9月前
基于optisystem的EDFA通信系統(tǒng)設(shè)計 
因此,一個OSA或WDM分析儀可以加在相同的監(jiān)視器上,一旦一個計算完成,就不需要再次運算。庫中可以利用的觀察儀包括:·光∕射頻頻譜分析儀,示波器∕光時域分析儀,眼圖分析儀,誤碼率分析儀,WDM分析儀,功率計。2、光學(xué)方案圖編輯器這個界面可以讓用戶快速而有效的創(chuàng)建和修改自己的設(shè)計。每個OptiSystem方案文件可以包含足夠多的設(shè)計版本。
2408
320科技工作室 ??? 3月前
基于啁啾光纖光柵實現(xiàn)對光纖通信系統(tǒng)的色散補償 
1、設(shè)計需求本案例是基于啁啾光纖光柵實現(xiàn)對光纖通信系統(tǒng)的色散補償,構(gòu)建了后置色散補償系統(tǒng)、前置色散補償系統(tǒng)和混合色散補償系統(tǒng)?;?em>OptiSystem仿真軟件實現(xiàn)了三種不同結(jié)構(gòu)的基于啁啾光纖光柵色散補償?shù)墓饫w通信系統(tǒng),通過眼圖評估系統(tǒng)通信性能。
2459 3
320科技工作室 ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時間用戶分析 
自訂分析模式用於填充自訂分析的資料。這些資料是用OpticStudio提供的現(xiàn)有圖形來顯示,用於大多數(shù)分析。此模式不允許對當前鏡頭系統(tǒng)或使用者介面進行更改(即:在這種模式下只允許對系統(tǒng)的副本進行更改)。自訂分析可以用C++ (COM)或C# (.NET)編寫。本文的自訂分析是用C#編寫的。
2080
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
序列模式的體積全像在OpticStudio的所有版本上都可以使用,但是繞射效率分析只有訂閱制才能使用。DLL是訂閱制旗艦版本的功能。體積全像在許多類型的光學(xué)系統(tǒng)中很受歡迎,例如:抬頭顯示器(HUD)、擴增實境(AR)和虛擬實境(VR)的頭戴型顯示器(HMD)。全像能夠?qū)⒐饩€繞射到任何所需的角度,其波長和角度的選擇性使其能夠創(chuàng)造更輕、更緊密的光學(xué)系統(tǒng)。
2123
w**elab86_Swsp ??? 3年前
某車型傳動系沖擊噪聲問題分析 
對于后三種工況下出現(xiàn)的持續(xù)或者間歇性沖擊噪聲,主要影響因素包含電控策略、零部件損壞、傳動軸角度等。本文主要針對第一種工況下產(chǎn)生的沖擊噪聲進行分析與研究,對其他工況下產(chǎn)生的沖擊噪聲進行簡要的總結(jié)性概括說明。沖擊噪聲的振動源主要來于驅(qū)動橋、變速箱等傳力機構(gòu)。所以本文通過對驅(qū)動橋內(nèi)部相關(guān)影響因素的試驗設(shè)計,對傳動系沖擊噪聲進行了系統(tǒng)的分析驗證。
4542 5
汽車公社 ??? 2年前
Moldex3D模流分析之Tokyo Seiki公司使用模流大幅減少試模次數(shù) 
設(shè)計變更的主導(dǎo)權(quán),已大幅度的由傳統(tǒng)式的只做代工向上提升,每一批模具代工至少有一半以上的模具,是由 Tokyo Seiki 主導(dǎo)修改產(chǎn)品設(shè)計,例如最近接手的印表機組件的流道不平衡問題,以及某知名國際相機廠牌的產(chǎn)品翹曲改良。對癥下藥,增加產(chǎn)品強度:流動平衡與結(jié)合線問題改良流動平衡目的是避免成品後所發(fā)生變形的主要改善方案,尤其針對精密性產(chǎn)品,在分析過程中常以流動平衡指數(shù)來作為比較數(shù)據(jù)。
2210
Moldex3D 中國 ??? 3年前
汽車傳動系NVH研究方法及趨勢論述 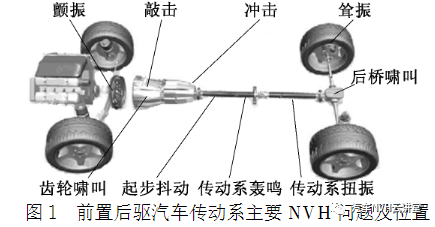
摘要:傳動系作為汽車的主要組成部分,可能產(chǎn)生多種NVH(噪聲、振動、聲振粗糙度)問題。以前置后驅(qū)傳動系為例,介紹常見典型傳動系NVH問題的產(chǎn)生機理及治理思路。從試驗分析和仿真分析兩個方面,對傳動系NVH問題研究方法進行詳細論述。在電動化、智能化背景下,總結(jié)了傳動系NVH控制技術(shù)發(fā)展趨勢及面臨的挑戰(zhàn)。
3325 3 6
車輛學(xué)長 ??? 3年前
非對稱半潛式起重平臺系泊系統(tǒng)特性研究 
2 不同數(shù)量系泊纜系泊系統(tǒng)運動響應(yīng)和張力分析環(huán)境載荷方向選取90°、135°、180°典型角度,此角度定義為風浪流的來向與船首(即平臺坐標系x正向)所成角度,浪向角示意圖如圖4所示。本文數(shù)值模擬采用不規(guī)則波Jonswap波譜,其表達式如式(1)所示。選擇北海海域的作業(yè)工況,有義波高為6m,譜峰周期為7.78s,γ取3.3。取定常海風與海流,速度分別為20m/s和1.03m/s。
4786 1 1
乘風破浪_ ??? 2年前
達索析統(tǒng)公司的MBSE方法實踐-MagicGrid 
注意,雖然權(quán)衡分析(Trade-Off)沒有在MagicGrid方法框架中顯性表達,但是在架構(gòu)設(shè)計或詳細建模中我們經(jīng)常要考慮針對某個問題去提供多個解決方案時,就一定會用到它,而且這是經(jīng)常性的。 在這種情況下,執(zhí)行權(quán)衡分析以選擇用于實現(xiàn)的最佳解決方案。
4822
一起學(xué)MBSE ??? 2年前
特斯拉與毫末智行自動駕駛方案對比分析 
比如在下圖的例子中,一輛大貨車出現(xiàn)在了一些攝像頭的視野中,但是很多攝像頭都只看到了目標的一部分,因此無法根據(jù)殘缺的信息做出正確的檢測,因此后續(xù)的融合效果也就無法保證。這其實是多傳感器決策層融合的一個一般性問題。 單攝像頭受限的視野 綜合以上分析,圖像空間感知+決策層融合并不是一個很好的方案。
2384
駕駛哥 ??? 4年前
前沿:基于寬視場光譜巡天望遠鏡(MUST)的光學(xué)系統(tǒng)概念設(shè)計 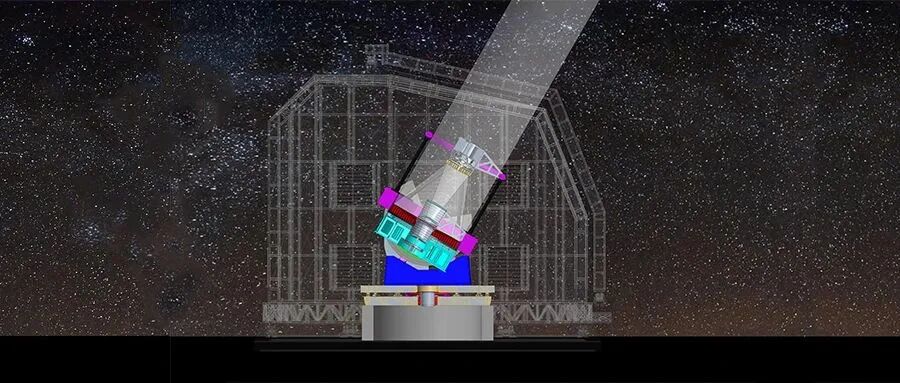
為了保證望遠鏡在不同天頂角下大氣色散的影響,后續(xù)光路中加入了一對相對旋轉(zhuǎn)工作方式的楔形透鏡作為大氣色散改正鏡(ADC)。除此之外,還有三片單透鏡與ADC組合在一起構(gòu)成多元素改正鏡系統(tǒng),共同消除光學(xué)系統(tǒng)的像差。
2493
光與影 ??? 2年前
ZEMAX軟件技術(shù)應(yīng)用專題:智慧型手機鏡頭模組 
智慧型手機是地球上最普遍的消費技術(shù)之一,包含大量高科技光學(xué)系統(tǒng)。大多數(shù)都有多個相機單元,這對設(shè)計師和製造商提出了挑戰(zhàn),以滿足嚴格的性能、成本和尺寸要求。在這篇Blog中,我們將討論 Zemax 解決方案如何幫助應(yīng)對和克服這些挑戰(zhàn)。智慧型手機鏡頭模組用於智慧型手機相機的鏡頭模組非常複雜,每個模組都包含多個鏡頭元件。
2042
w**elab86_Swsp ??? 3年前
基于Adams的六足直立式步行機器人運動仿真分析 
首先,利用矢量解析法對步行腿機構(gòu)建立相應(yīng)運動數(shù)學(xué)模型并分析;再利用虛擬樣機分析軟件Adams對單側(cè)步行腿機構(gòu)進行運動軌跡建模仿真分析;最后,搭建實物樣機驗證了工作原理、方案設(shè)計、虛擬仿真結(jié)果的正確性和可行性。結(jié)果表明,步行腿機構(gòu)的運動特性能夠滿足六足直立式步行機構(gòu)的工作要求,設(shè)計方案可行,可為下一步的動力學(xué)分析和優(yōu)化設(shè)計提供理論基礎(chǔ)。
4190 7 8
仿真客 ??? 3年前
塔架環(huán)境下運載火箭天線耦合輻射仿真研究 
在FEKO中的建筑坐標系XYZ定義如下:坐標原點:箭體軸心與塔架外立面變窄處平面交界點;Y軸:原點指向垂直于遠離固定平臺的方向;Z軸:原點指向箭體軸心向上;X軸:由右手法則確定。同時,建立天線坐標系UVN,方向與建筑坐標系一致。方便起見,下文中統(tǒng)一在XYZ坐標系下表示天線位置和電場強度。
4027 3 1
航模無人機干貨分享 ??? 2年前
技術(shù)干貨丨OptiStruct 非線性之前車門過開分析(內(nèi)附模型下載) 
<p>緊接上篇《OptiStruct非線性之前車門下沉分析》,本篇將介紹 OptiStruct 非線性系列之車門過開分析,該文涉及的基礎(chǔ)模型與上篇模型一致(<strong>模型可在文末進行下載~</strong>),僅載荷約束及分析目標有所變化,一起來看看本期的內(nèi)容吧~</p><p><br></p><p><strong>分析目的</strong></p><p>檢驗車門在過開濫用工況下的強度性能,需滿足加載和卸載位移需求
2518 1
ALTAIR ??? 1年前
Speos案例 | 基于Speos的衍射波導(dǎo)AR風擋HUD系統(tǒng)仿真解決方案 
通過Light Expert光跡分析工具,可三維追溯雜散光傳播路徑,針對性優(yōu)化外殼材質(zhì)、安裝角度及遮光結(jié)構(gòu)。圖8:日光雜散光光跡分析界面5.4 多工況結(jié)果融合與可視化調(diào)試將三組仿真結(jié)果合并后導(dǎo)入人眼視覺實驗室,通過虛擬光照控制器可實時調(diào)節(jié)PGU光源、太陽光、環(huán)境光亮度比例,直觀觀測不同光照場景下AR HUD成像效果,實現(xiàn)參數(shù)快速迭代優(yōu)化。
88
摩爾芯創(chuàng) ??? 昨天
20條/頁 
 9
9 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
