



有限元理論基礎(chǔ)及Abaqus內(nèi)部實現(xiàn)方式研究系列42: 聲學(xué)分析(1)-有限元 
該模型從鄭鈞Adam老師的Abaqus線性動力&噪音分析詳解(理論及實作) Abaqus 線性 動 力 & 噪音分析詳解 ( 理論及實作 ) 視頻教程 _ 培訓(xùn)課程 - 技術(shù)鄰 (jishulink.com) 下載獲得。由于卡車為對稱模型,所以只用建一半模型,聲音到了對稱面將全反射,但和結(jié)構(gòu)分析不同,聲學(xué)有限元邊界默認全反射,所以在此對稱面無需任何額外設(shè)置。
8465 15 16
SnowWave02 ??? 2年前
乘用車車門結(jié)構(gòu)側(cè)面碰撞仿真全流程:PreSys + Ansys 實戰(zhàn)操作
,優(yōu)化了幅值相位曲線的變換關(guān)系。
2417
工程師小戴 ??? 2月前
Abaqus疑難雜癥——INP文件自定義輸出 
軟件后處理時可以看到節(jié)點上的應(yīng)力結(jié)果是因為ABAQUS對單元積分點上的應(yīng)力做了差值平均。以下列出常用關(guān)鍵詞的用法,大家可根據(jù)自己需要學(xué)習(xí)。
9532 22 7
易公子 ??? 4年前
【JY】ETABS的非線性直接積分法的設(shè)置與應(yīng)用 
ETABS在生成人工波時,不但考慮了人工波要在頻譜和幅值上與反應(yīng)譜吻合,還考慮了地震波的持時特性。從圖2中可以看出人工波(紅色曲線)與天然波(藍色曲線)的持時特性吻合得很好。生成人工波的方法有兩種,一種為頻域方法,另一種為時域方法。一般來講,時域方法匹配的效果更好一些,但是花費的時間更多。
2885 2
建源之光 - 減隔震 ??? 3年前
【交流】有限元法分析結(jié)果的四類誤差,你知道嗎? 
工程使用中,起豎機構(gòu)通過銷軸作用于豎耳銷孔以推動橫板連接機構(gòu)完成起豎,具體壓力載荷P的數(shù)學(xué)形式可表示為: 上式(1)中,P0為最大壓力載荷幅值,θ為載荷作用面上某點的周向角度,F(xiàn)為真實的載荷力,R為銷孔半徑,L為銷孔縱向長度。數(shù)學(xué)建模時,僅為滿足工程簡單計算的需求,材料模型通常取為線性彈性模型。
3616 9 3
天佑有限元 ??? 4年前
基于RecurDyn的多工況下的尼龍蝸輪疲勞性能研究 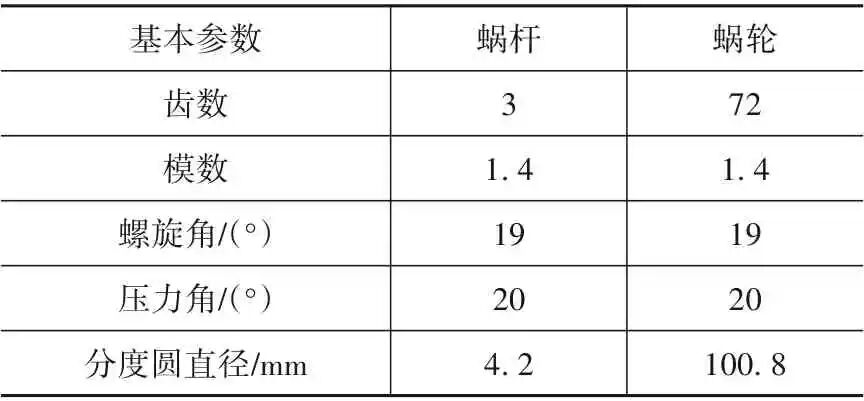
在蝸桿輸入端沿蝸桿軸線方向施加旋轉(zhuǎn)副,在該旋轉(zhuǎn)副上添加速度驅(qū)動;在蝸輪旋轉(zhuǎn)中心上施加反向轉(zhuǎn)矩。蝸桿速度驅(qū)動函數(shù)和蝸輪反向轉(zhuǎn)矩函數(shù)根據(jù)多工況加載條件利用STEP函數(shù)編寫。選擇RecurDyn 的動力學(xué)分析,輸入仿真時間為31.1 s,進行蝸輪蝸桿動力學(xué)仿真。通過對蝸輪蝸桿仿真結(jié)果的分析,尼龍蝸輪在齒根處產(chǎn)生應(yīng)力集中,與理論分析結(jié)果一致,并得到齒根處在不同工況下的應(yīng)力值,如圖6所示。
3019 1 1
仿真客 ??? 3年前
【JY】橡膠系支座/摩擦系支座全面解析 
建議通過隔震層 屈服力/摩阻力 和 屈服后剛度 進行計算極限最大殘余位移,來限制隔震結(jié)構(gòu)的殘余位移!而不是通過1.2倍罕遇地震下最大位移對應(yīng)恢復(fù)力來確定。畢竟我們并不知下一次地震來的是多大的地震。 而實際上,在震害中很難達到極限最大殘余位移,由于地震幅值變化特性,會將支座殘余變形震小,通常會小于極限最大殘余變形的一半。
3231 6 1
建源之光 - 減隔震 ??? 3年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
