



資料分享丨HyperWorks工具箱v0.5:航空工具箱重磅上線! 
下面我們快來看看本期的10個小工具吧~Toolbox v0.5Toolbox v0.5包含以下10個小工具工具一FreeSystems – 坐標系釋放 自動創建新的坐標系參考點,并釋放原有參考點工具二Transform Matrix – 矩陣轉換 計算坐標系之間的轉換矩陣工具三
2804
ALTAIR ??? 1年前
GIS中分辨坐標系是幾度分帶,坐標有沒有帶號?及添加或去除帶號 
首先,加載數據,3度分帶(帶號40)2000投影坐標系,如圖所示 打開菜單欄-ArcToolBox工具箱,如圖所示 在ArcToolBox工具箱中,進入數據管理工具,如圖所示 在數據管理工具中,點擊打開投影和變換工具,如圖所示 在投影窗口中,添加輸入矢量,選擇輸出矢量保存位置及名稱,選擇輸出坐標系(3度分帶,40
3718
巖土聯盟 ??? 4年前
基于MATLAB的直接序列擴頻通信系統的仿真模型 
目前,擴展頻譜通信的應用十分廣泛,主要是軍事和民用兩大方面,擴頻技術成為通信技術的熱點和焦點。本文介紹了擴展頻譜通信技術,詳細描述了直接序列擴展頻譜技術的實現過程,在MATLAB軟件中利用SIMULINK工具箱建立直接序列擴頻系統的仿真模型,并通過誤碼率分析直接序列擴頻系統的抗干擾能力,對擴頻通信系統的研究掌握具有一定的推動作用。
4904 3 1
Matlab心得交流 ??? 2年前
ZEMAX軟件技術應用專題:如何在OpticStudio中設計DOE透鏡或超穎透鏡 
繞射光學元件(DOE)和超表面/超穎透鏡在光學系統設計中越來越受歡迎,其應用範圍從手機鏡頭到AR / VR耳機,從3D傳感到照明。但是,對於包含 DOE 或超穎透鏡的系統進行模擬和設計總是很棘手的。沒有通用的方法可以處理所有情況。設計人員需要根據具體情況決定其系統的策略。
2188
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術應用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
要了解有關如何在 OpticStudio 中應用該理論、如何設置序列和非序列系統以及下載範例系統的更多信息,您可以在此處取得本知識庫文章的全部內容。Ansys Zemax國內可靠代理商 光研科技南京有限公司是國內可靠的光學軟件和儀器光電供應商,提供企業定制化上門培訓服務,承接各類光學設計項目,并有一系列自主編寫出版的光學設計書籍。
2122
w**elab86_Swsp ??? 3年前
HyperMesh寶典丨Midmesh專用工具箱 
在建模過程中會用到各種各樣的HyperMesh自帶工具,為了減少切換和找工具的麻煩,節約時間,我們把一些特別常用的工具集中到了自定義工具帶,如下圖所示:使用方法請參考以下視頻:接下來講二次開發工具箱的使用方法:分塊與合并大型件可以考慮先將體切成若干塊再進行midmesh的生成,這樣做的好處是:
3981 25 18
ALTAIR ??? 1年前
ZEMAX軟件應用專題:波前 (OPD) 怎麼算的 
然後可以看到系統自動加入兩個Coordinate Break以及相關設定,如下。最後在確保把Chief的長度設定到出瞳的Radius上。便可以看到系統現在如下。打開評價函數,重新輸入以下數值驗證??梢钥吹侥壳暗淖畲笠晥?(Hy=1) 邊緣光線 (Py=-1) 的波前差等於3.555676,跟OPD Fan中的結果一致。
2511 1
w**elab86_Swsp ??? 3年前
【技術貼】EXCITE Mount Layout工具在動力總成懸置設計上的應用 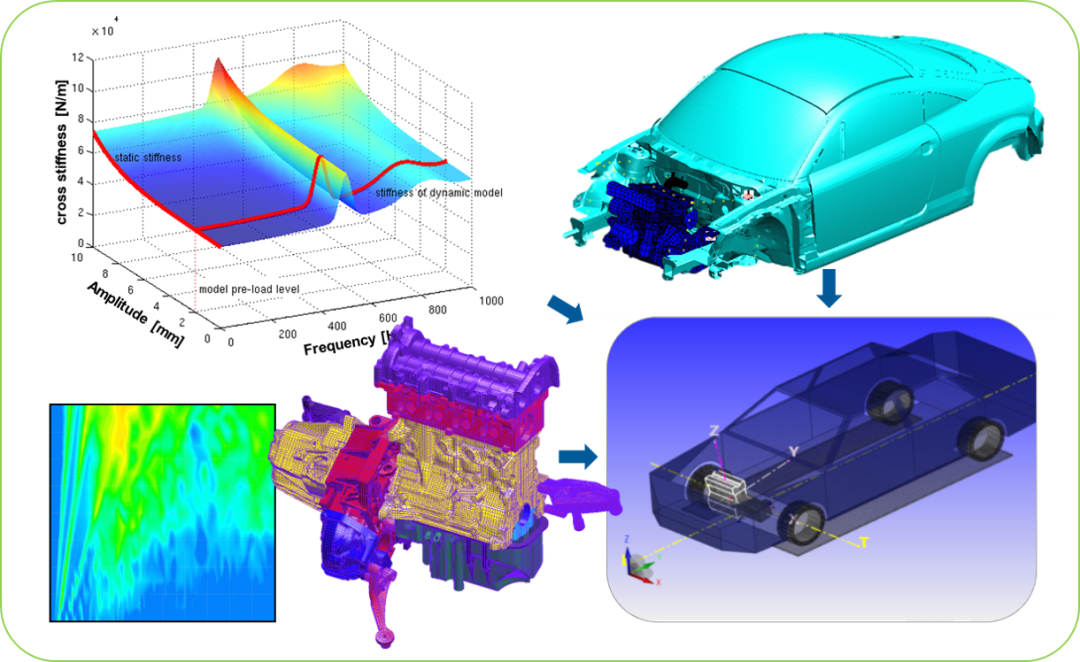
為了計算動力總成準確的動響應位移,EXCITE Mount Layout 工具支持自動讀取曲軸系多體動力學模型數據,定義發動機真實的載荷邊界。同時考慮整車的運行狀態,例如整車運動加速度以及Pitch與Roll方向傾斜角度對于懸置位移的影響。對于多檔位汽車,在車輛行駛過程中會伴隨變速箱不同檔位的切換,變速箱不同檔位輸出直接關系到動力總成所受反向力矩的變化,繼而影響到動力總成的響應位移。
2829 10 5
AVL先進模擬技術 ??? 3年前
VirtualLab Unity應用:光通信窄帶濾光片 
該濾光片能夠實現高精度的信號分離,有效抑制雜散光干擾,從而顯著提升系統的信噪比與整體光學性能,適用于高要求的光通信場景。 應用場景 光通信窄帶濾光片需要實現某一特定波長的信號傳輸并且強烈抑制相鄰波長的干擾。
1792
信光嗎 ??? 7月前
ZEMAX軟件技術應用專題:智慧型手機鏡頭模組 
智慧型手機是地球上最普遍的消費技術之一,包含大量高科技光學系統。大多數都有多個相機單元,這對設計師和製造商提出了挑戰,以滿足嚴格的性能、成本和尺寸要求。在這篇Blog中,我們將討論 Zemax 解決方案如何幫助應對和克服這些挑戰。智慧型手機鏡頭模組用於智慧型手機相機的鏡頭模組非常複雜,每個模組都包含多個鏡頭元件。
2042
w**elab86_Swsp ??? 3年前
大型系留氣球的風洞研究之CFD驗證 
圖 1 全尺寸和小尺寸的雷諾數比較氣動數據庫的更新將繼續以歷史分析工具為基礎,并對其進行驗證,特別是針對大型系留氣球。
3155 3 2
網格大師 ??? 2年前
光柵區中的光柵方向 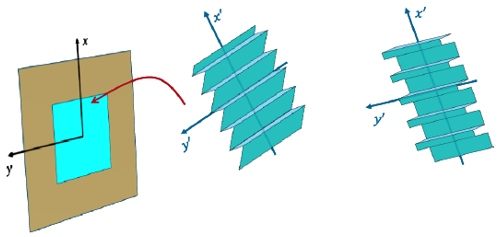
關于y軸旋轉180°(未選中) 注意:默認時,為了保持光柵坐標系和界面坐標系的重疊,光柵添加到光學界面的右側(z軸和z‘軸相同)。坐標系定義與光柵工具箱中稍有不同,因為在光柵工具箱中:─如果光柵界面加在襯底的第一層界面,其z軸和x軸與平面界面的方向完全相反。
2284
追光ing ??? 1年前
五自由度機械臂運動學分析(三轉動+兩移動自由度) 
:')robot.fkine(init_ang)%%%自定義矩陣disp('通過變換矩陣求解旋轉矩陣如下:')fkine(init_ang)如圖所示:任意選取某點工具箱仿真姿態結果與變換矩陣計算結果一致。
3035
余俊煒 ??? 3年前
為什么說齒輪仿真需要Simpack 附SIMPACK動力學分析系列教材下載 
例如,寶馬摩托車公司使用Simpack對變速箱換擋過程進行分析,并研究參數對性能的影響。 (4) 整機級動態性能仿真把齒輪傳動系統與其它機構部件集成,進行整機級系統動態性能仿真,更加真實模擬現實模型。例如,對包含詳細變速箱模型的汽車整車傳動系進行動態仿真及NVH分析,分析各部件的相互耦合作用。
3486 1
實打實 ??? 4年前
案例分享 | SC/Tetra結合流體分析在漁業領域的應用 
這種流體分析工具已經成為我們不可或缺的工具,“高木教授評論說。更多地利用ICT信息和通信技術(信息和通信技術)促進漁業發展 高木教授希望在漁業領域更多地利用信息和通信技術。在農業領域,ICT已變得更加普遍,用于環境監測和作物觀測。然而,將ICT技術應用于廣闊而深的水下環境并不是一項容易的任務。
2208
MSC Cradle CFD ??? 3年前
2024中國航空航天新材料展|2024重慶國際無人機產業展會 
■軍用安全防護箱: 軍用便攜安全箱、防護箱、槍支裝備箱、軍用拉桿箱、軍用通訊箱、子彈安全箱、軍用包裝箱、軍用塑料箱、安全存儲箱、航空箱、工具箱、設備保護箱、醫療設備箱、儀器儀表箱、軍用金屬箱、防水安全箱、防爆箱、警用箱、空投箱等 ■軍事通信裝備與指揮控制: C4ISR技術與設備、集群通信、應急通信、無線通信、衛星通信、多媒體通信、光通信(光纖光纜)、動中通、靜中通、單兵通信裝備
2221
用戶_38817 ??? 2年前
VirtualLab Fusion:楔形平板中多次反射的分析 
? 對楔形平板高反射平面的分析需要利用光柵工具箱的嚴格仿真。? 對楔形平板低反射平面的分析利用基本工具箱即可。? 對楔形平板低反射平面的仿真,一般僅需要1-3次的往返即可。
2254 1 1
追光ing ??? 3年前
如何防止齒輪嚙合和齒輪變形所產生的噪音 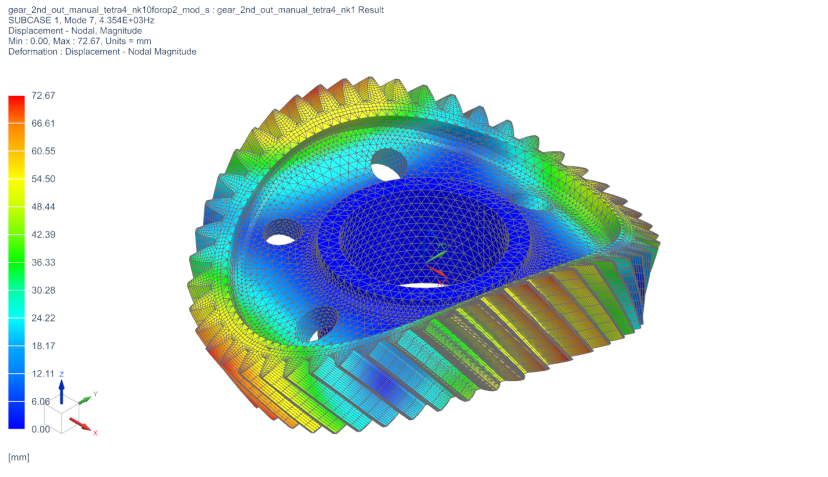
但是齒輪嚙合是變速箱工作不可避免的,所以仿真工具需要有準確的方法來預測作為振動源的齒輪嚙合過程。一個基本要求是,對于給定的載荷條件,所使用的方法必須捕獲嚙合循環期間的剛度變化。然而,由于負載條件在運行條件下發生變化,必須考慮變化的負載及其對齒輪箱結構柔性和軸承的影響。
2777 4
聲學工程師小吳 ??? 2年前
光柵區中的光柵方向 
關于y軸旋轉180°(未選中) 注意:默認時,為了保持光柵坐標系和界面坐標系的重疊,光柵添加到光學界面的右側(z軸和z‘軸相同)。坐標系定義與光柵工具箱中稍有不同,因為在光柵工具箱中:─ 如果光柵界面加在襯底的第一層界面,其z軸和x軸與平面界面的方向完全相反。
2147
張藝凡 ??? 2年前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
利用Matlab中機器人仿真工具箱Robotics Tool中Link和SerialLink兩個函數可建立機器人模型[] 。其中,函數表達式如下: 式中,theta為關節變量;d為偏置距離;alpha為扭轉角;a為連桿長度;sigma表示關節類型(0為旋轉關節,1為移動關節);前四個參數分別對應表1中的,,,。
5213 1
余俊煒 ??? 2年前
20條/頁 
 13
13 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
