



ZEMAX軟件技術(shù)應(yīng)用專題:如何為光學(xué)相干斷層掃描系統(tǒng)建模 
深度掃描也稱為軸向掃描或A掃描,它根據(jù)反射到樣品中的距離來測量反射光的強(qiáng)度。 儘管它在OCT系統(tǒng)的類型之間有所不同,但深度掃描通常由參考鏡執(zhí)行,以使樣品返回的光對應(yīng)於樣品和參考之間的特定光程差(OPD)。 透過以x或y方向旋轉(zhuǎn)掃描鏡來執(zhí)行橫向,橫向或b掃描,從而在整個樣品區(qū)域上平移探測光束。我們從商用OCT系統(tǒng)中獲取目標(biāo)規(guī)格。 軸向分辨率完全來自光源特性,應(yīng)在5μm的數(shù)量級上。
2221
w**elab86_Swsp ??? 3年前
Ansys Zemax光學(xué)設(shè)計軟件技術(shù)教程:眼科鏡片設(shè)計 
傳統(tǒng)設(shè)計方式對於人眼而言,存在一個虛擬的“遠(yuǎn)點(diǎn)”,這個點(diǎn)代表了我們可以清楚看到物體的極限距離。在這個點(diǎn)之外的景物,將會成像於視網(wǎng)膜前方。當(dāng)眼球轉(zhuǎn)動時遠(yuǎn)點(diǎn)的距離不會改變,因此會以這個距離為半徑形成一個“遠(yuǎn)點(diǎn)球”。此外,遠(yuǎn)點(diǎn)會是視網(wǎng)膜的光學(xué)共軛,因此眼鏡鏡片的功能就是把偏離的影像修正到遠(yuǎn)點(diǎn)球上。人眼的瞳孔在此系統(tǒng)中充當(dāng)光圈的角色,且當(dāng)視線移動時,瞳孔將同步的以眼球為中心轉(zhuǎn)動。
2212
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:在 OpticStudio 中模擬高階雷射光束 
存在依賴於給定係統(tǒng)對稱性的其他正交解集。1 它們可用於對高階光束模式進(jìn)行建模。在這篇Blog中,我們描述了 OpticStudio 中可用於表徵高階雷射光束的模型。定義後,此類光束可以在 OpticStudio 中使用物理光學(xué)傳播設(shè)計的任何光學(xué)系統(tǒng)中傳播。
2057
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:用於數(shù)位元投影光學(xué)中均勻照明的陣列透鏡 (蒼蠅眼) 
因此,需要一種設(shè)備來“去高斯”,或在空間上將非均勻光束輪廓轉(zhuǎn)換為均勻光束輪廓。具有這種能力的一個這樣的設(shè)備是一對複眼空間光學(xué)積分器陣列。何謂透鏡陣列?透鏡陣列是將單個光學(xué)元件組裝成單個光學(xué)元件的二維陣列。它用於將光在圖像平面上從非均勻分佈空間轉(zhuǎn)換為均勻輻照度分佈。使用透鏡陣列的數(shù)位投影系統(tǒng)通常與具有提供半準(zhǔn)直入射光的拋物面反射器的燈組件結(jié)合使用。
2001
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
要了解有關(guān)如何在 OpticStudio 中應(yīng)用該理論、如何設(shè)置序列和非序列系統(tǒng)以及下載範(fàn)例系統(tǒng)的更多信息,您可以在此處取得本知識庫文章的全部內(nèi)容。Ansys Zemax國內(nèi)可靠代理商 光研科技南京有限公司是國內(nèi)可靠的光學(xué)軟件和儀器光電供應(yīng)商,提供企業(yè)定制化上門培訓(xùn)服務(wù),承接各類光學(xué)設(shè)計項目,并有一系列自主編寫出版的光學(xué)設(shè)計書籍。
2121
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時間用戶分析 
打開LiDAR 文件可以在本文的附件連結(jié)中下載檔案“Flash_NSC_Final.zar”,該檔中包含代表快閃雷射雷達(dá)的系統(tǒng),雷射雷達(dá)位於貨車的頂部,貨車在路上,路上還有兩個行人和一堵立著的綠色牆體。雷射雷達(dá)向場景中發(fā)射雷射脈衝:光照射到周圍的物體上發(fā)生散射,部分光被散射回雷射雷達(dá)探測器。
2080
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:基於 Alvarez自由曲面透鏡的光學(xué)變焦 
我們在一個光學(xué)系統(tǒng)中有幾組透鏡元件,它們沿著光軸沿著預(yù)定義的軌跡移動,從而提供了光學(xué)系統(tǒng)最終焦距(變焦係數(shù))的變化。在 Alvarez變焦鏡頭的情況下,我們有一對所謂的Alvarez鏡頭,這些鏡頭元件相互之間的橫向位移提供了光學(xué)系統(tǒng)焦距的變化。傳統(tǒng)變焦鏡頭與 Alvarez變焦鏡頭的主要區(qū)別在於,傳統(tǒng)系統(tǒng)鏡頭沿光軸運(yùn)動,而Alvarez系統(tǒng)鏡頭則沿垂直於光軸的方向運(yùn)動。
2219
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:智慧型手機(jī)鏡頭模組 
智慧型手機(jī)是地球上最普遍的消費(fèi)技術(shù)之一,包含大量高科技光學(xué)系統(tǒng)。大多數(shù)都有多個相機(jī)單元,這對設(shè)計師和製造商提出了挑戰(zhàn),以滿足嚴(yán)格的性能、成本和尺寸要求。在這篇Blog中,我們將討論 Zemax 解決方案如何幫助應(yīng)對和克服這些挑戰(zhàn)。智慧型手機(jī)鏡頭模組用於智慧型手機(jī)相機(jī)的鏡頭模組非常複雜,每個模組都包含多個鏡頭元件。
2042
w**elab86_Swsp ??? 3年前
建立基矢坐標(biāo)系研究材料各向異性特性 
.png"></p><p>在基矢坐標(biāo)系下,定義了結(jié)構(gòu)各向異性的導(dǎo)熱系數(shù),并仿真得到螺旋結(jié)構(gòu)各向異性材料的溫度場和電勢,仿真結(jié)果如圖所示:</p><p><img src="https://img.jishulink.com/upload/202205/1dbc79037d8441e3a771e1d13394549e.png" alt="Untitled2.png"></p><p class="ql-align-center
2341
C乘風(fēng)破浪 ??? 4年前
技術(shù)分享︱多重參考系模型在風(fēng)扇通風(fēng)仿真中的自動化實現(xiàn):精度與效率的工程平衡 
,因參考系旋轉(zhuǎn)而受到的切向與法向偏轉(zhuǎn)效應(yīng)。
1901
神工坊(高性能仿真) ??? 2月前
Zemax光學(xué)設(shè)計技術(shù)教程:如何使用Jones Matrix表面 
有一點(diǎn)必須要特別注意的,Jones Matrix並不會因為Ez的變化產(chǎn)生改變 (系統(tǒng)預(yù)設(shè)入射光垂直入射偏振片)。一般而言,偏振片和玻板(waveplate)確實是用在準(zhǔn)直入射光線或發(fā)散角(divergence angle)極小的情況下。假如是入射光束是準(zhǔn)直的,且與Jones Matrix互相垂直。
2425
w**elab86_Swsp ??? 3年前
Ansys Workbench正交各項異性(橫觀各向同性)材料強(qiáng)度失效評估 
同時,還知道卡扣的材料是PA+GF20,玻纖均勻分布,玻纖整體排布方向順著卡扣方向(全局坐標(biāo)系的Y方向)幾何模型約束位置和載荷如下所示:
1512
cae_lizh ??? 1月前
鋼箱梁系桿拱橋靜動力分析 
摘要: 以某下承式鋼箱梁系桿拱橋為研究對象,利用有限元軟件MIDAS/Civil建立橋梁仿真模型,對施工和成橋階段的靜力?動力特性進(jìn)行分析?結(jié)果表明,成橋狀態(tài)下受力和承載能力均滿足規(guī)范要求,極限承載力狀態(tài)下主梁?拱肋及吊桿的動力特性滿足規(guī)范要求?關(guān)鍵詞: 橋梁;鋼箱梁系桿拱橋;靜力分析;動力分析系桿拱橋按先梁后拱施工,當(dāng)主梁承受荷載作用時,荷載通過吊桿傳遞給拱肋,使其與主梁共同分擔(dān)荷載
5563 3
魯班施工 ??? 2年前
基于ADAMS的點(diǎn)按手法運(yùn)動仿真 
(3)機(jī)械臂末端從與人體接觸的位置向正下方運(yùn)動,速度的變化過程為:0—加速—恒速—減速—0,向下運(yùn)動的距離為10 mm,運(yùn)動時間為7 s,到達(dá)最下方時,根據(jù)病人的反映情況,適當(dāng)保持一段時間,這里假設(shè)為2 s。(4)機(jī)械臂末端從上一步到達(dá)的位置,垂直向上抬起至步驟(2)到達(dá)的位置。時間為4~5 s,此時間參數(shù)沒有嚴(yán)格的定量。重復(fù)步驟(3)和步驟(4),實現(xiàn)點(diǎn)按法的運(yùn)動過程。
3010 2
擺渡人張 ??? 2年前
汽車傳動系NVH研究方法及趨勢論述 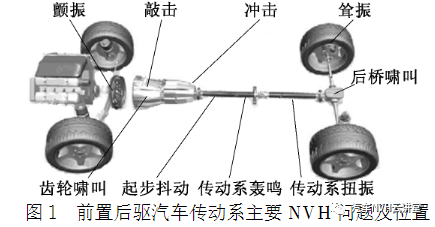
汽車企業(yè)在向數(shù)字化、網(wǎng)絡(luò)化、智能化轉(zhuǎn)型,將人工智能技術(shù)與傳動系NVH控制技術(shù)相融合,從而實現(xiàn)傳動系NVH問題的自動識別。目前已有多家主機(jī)廠及汽車技術(shù)研發(fā)機(jī)構(gòu)在積極推動這項技術(shù)的研發(fā)與應(yīng)用。4 結(jié)語(1)在傳動系工作過程中,可能會產(chǎn)生多種NVH問題,可以按照“源—路徑—響應(yīng)”思路對其產(chǎn)生機(jī)理進(jìn)行分析,找出主要影響因素。
3323 3 6
車輛學(xué)長 ??? 3年前
ANSYS ACP 復(fù)合材料鋪層無人機(jī)結(jié)構(gòu)仿真,附帶詳細(xì)講解視頻和案例模型 
注意事項:抽殼后需檢查面法向方向(Tools > 面法向),確保所有面外法向一致,避免后續(xù)分析中出現(xiàn)應(yīng)力方向錯誤。對于多曲面模型,抽殼可能導(dǎo)致局部厚度不均,需通過“偏置面”功能手動調(diào)整。細(xì)節(jié)簡化,刪除非關(guān)鍵特征:移除直徑小于2mm的孔、倒角及裝飾性結(jié)構(gòu)(選中孔邊緣 > Delete)。
3615 4 1
孫一凡仿真 ??? 9月前
1+8+8 第三屆中國仿真技術(shù)產(chǎn)業(yè)高峰論壇暨成都(溫江)數(shù)字化創(chuàng)新峰會圓滿舉辦 
著力構(gòu)建以親而有度、清而有為為特質(zhì)的一流營商環(huán)境,堅持向互聯(lián)網(wǎng)要效率、向流程再造要效率、向簡政放權(quán)要效率,在全國首創(chuàng)“提醒服務(wù)”和創(chuàng)建天府商務(wù)服務(wù)區(qū),深層次推進(jìn)政府職能轉(zhuǎn)變,用“尺度、速度、溫度、力度”快速解決企業(yè)需求,讓企業(yè)和員工發(fā)財致富、讓城市和社會發(fā)展進(jìn)步。
2803
Bjhq2021 ??? 2年前
無人潛水艇的設(shè)計與仿真 
3)左右貫通的兩個側(cè)向推進(jìn)器,輔助無人艇橫向轉(zhuǎn)向以及側(cè)向平移。
3906 4 2
海工 ??? 4年前
comsol中壓電陶瓷仿真學(xué)習(xí)-邊界設(shè)置篇 
螺栓處一致對的設(shè)置: 壓電材料添加兩個,域的選擇彼此錯開就行,在材料的本構(gòu)關(guān)系中選擇應(yīng)力-電荷型,第一個壓電材料設(shè)置中坐標(biāo)系就默認(rèn)全局坐標(biāo)系,因為默認(rèn)情況下材料與空間的Z方向重合;而第二個壓電材料需要一個坐標(biāo)系與材料的x3軸重合,材料x3軸現(xiàn)在是向下的,因此將坐標(biāo)系的
4357
CAE備忘錄 ??? 3年前
基于點(diǎn)云的球銑加工動態(tài)仿真 
圖1 球頭銑刀模型 2.3坯件表面點(diǎn)的移動由于坯件是表面點(diǎn)云模型,被銑削時可以近似看作是一個被“擠壓”的過程,如圖2所示,在一個最小仿真計算步驟中,銑刀移動Δv,球心C0移動到C1,坯件表面將被“擠壓”向銑刀移動方向縮進(jìn)Δv深度。
4052 5
數(shù)控編程網(wǎng) ??? 2年前
20條/頁 
 15
15 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
