



starccm船舶六自由度運(yùn)動(dòng)?
求教starccm能對(duì)這種帶吊物的船進(jìn)行六自由度仿真嗎?
3794 2 2
用戶(hù)_46685 ??? 1年前
基于粒子群優(yōu)化算法的六自由度機(jī)械臂三維空間避障規(guī)劃 
[2]馬宇豪.六自由度機(jī)械臂避障軌跡規(guī)劃及控制算法研究[D].中國(guó)科學(xué)院大學(xué)[2024-06-08]. 圖1 六自由度機(jī)械臂三維空間避障規(guī)劃示意圖 基于粒子群優(yōu)化算法的三維避障路徑規(guī)劃1.1 路徑規(guī)劃問(wèn)題描述路徑規(guī)劃是指在已知環(huán)境信息的情況下,確定從起始點(diǎn)到目標(biāo)點(diǎn)的最優(yōu)路徑,并且該路徑不能與環(huán)境中的障礙物相交。
2409
320科技工作室 ??? 1年前
6-pss 并聯(lián)六自由度機(jī)構(gòu)軌跡規(guī)劃 
6-pss 并聯(lián)六自由度機(jī)構(gòu)軌跡規(guī)劃 1、 建模 程序如下: % clc % clear all % function []=PSS1(XP,YP,ZP) tic %%%%%鍒濆浣嶇疆鐨勪綅濮?%%%%% % XP = 0; %鍔ㄥ鉤鍙扮浉瀵歸潤(rùn)騫沖彴鐨勫垵濮嬩綅緗潗鏍?
2066 1
余俊煒 ??? 2年前
六軸寬軌12自由度車(chē)輛--地面不平順耦合模型 
六軸寬軌12自由度車(chē)輛--地面不平順耦合模型 條件:剛性路面 車(chē)輛特點(diǎn):12自由度 車(chē)橋耦合動(dòng)力學(xué)數(shù)值模擬分析
2045
JerryCSU ??? 2年前
六軸12自由度車(chē)輛-路面不平順耦合模型 
地面:剛性,粗糙(不平順) 車(chē)輛:12自由度,六軸寬軌 出售: 500RMB
1097
JerryCSU ??? 2年前
168基于matlab的六自由度并聯(lián)搖擺臺(tái)的反解控制算法 
基于matlab的六自由度并聯(lián)搖擺臺(tái)的反解控制算法,stewart平臺(tái),配有GUI界面,可以自定義角度,桿長(zhǎng)等參數(shù)。設(shè)定動(dòng)平臺(tái)位姿即能得到電機(jī)參數(shù)。程序已調(diào)通,可直接運(yùn)行。
1950
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
六自由度機(jī)械臂雅可比矩陣與力矩計(jì)算(matlab代碼) 
clear;clc;close all;format compactL(1)=RevoluteMDH('d',0.1215,'a',0,'alpha',0); L(2)=RevoluteMDH('d',0.1225,'a',0,'alpha',pi/2,'offset',-pi/2);L(3)=RevoluteMDH('d',-0.102,'a',-0.300,'alpha',0)
2518
余俊煒 ??? 3年前
六自由度機(jī)械臂五次多項(xiàng)式軌跡規(guī)劃(Fivejtraj_Function自編寫(xiě)函數(shù)) 
clear,clc,close allformat compactrobotModel=4;DH_Param;JointNum=length(DH);ROCR6v2 關(guān)節(jié)2、3偏置qlim=deg2rad([-179,179;-146,146;-146,146;-179,179;-179,179;-179,179]);for i=1:JointNum L(i)=RevoluteMDH
2603
余俊煒 ??? 3年前
基于STAR-CCM+的四旋翼無(wú)人機(jī)六自由度氣動(dòng)仿真數(shù)值模擬 

船舶工程、航空航天在讀學(xué)生,計(jì)算流體、無(wú)人機(jī)相關(guān)從業(yè)者等
2207 3
技術(shù)鄰直播 ??? 2年前
六自由度機(jī)械臂MDH_stl
2305
余俊煒 ??? 3年前
淺析有限元分析中自由度的概念 
空間中的剛體有六個(gè)自由度。這是因?yàn)橐粋€(gè)剛體在三維空間中可以進(jìn)行平移運(yùn)動(dòng)(沿x、y、z軸方向),同時(shí)還可以繞這三個(gè)軸進(jìn)行轉(zhuǎn)動(dòng)。假設(shè)A點(diǎn)位于某條線上,則A點(diǎn)有幾個(gè)自由度?假設(shè)A點(diǎn)位于某條線上,除了可以在該線上進(jìn)行平移運(yùn)動(dòng)外,還可以繞該線旋轉(zhuǎn)。這意味著A點(diǎn)除了有兩個(gè)平移自由度(沿線的兩個(gè)方向),還有一個(gè)旋轉(zhuǎn)自由度(繞該線旋轉(zhuǎn)的角度)。
2699
CAE知識(shí)手札 ??? 2年前
【JY】基于Matlab的(單)多自由度動(dòng)力學(xué)代碼分享 
寫(xiě)在前文多自由度分析是現(xiàn)代工程和科學(xué)研究中不可或缺的一部分。它涉及到對(duì)復(fù)雜系統(tǒng)的動(dòng)力學(xué)行為進(jìn)行精確描述和預(yù)測(cè)。分享下多自由度的源代碼,僅供學(xué)習(xí)。
4298 12 2
建源之光 - 減隔震 ??? 2年前
算例精選STAR-CCM+模擬船航行|DFBI:頂頭波中的船 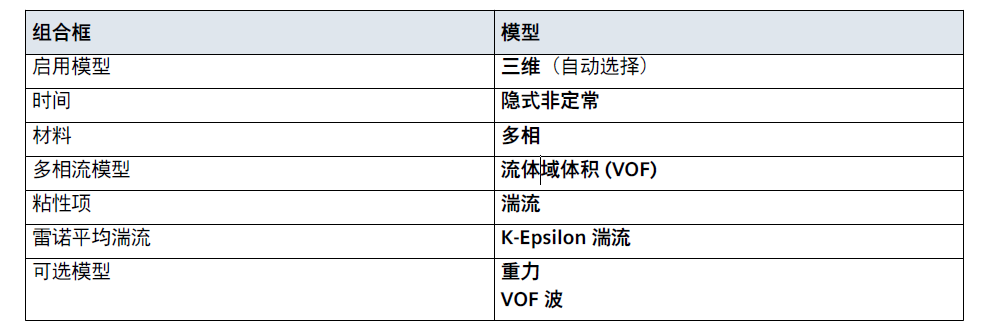
可視化結(jié)果總結(jié)1.摘要本教程演示如何使用具有自由表面流體的六自由度求解器對(duì)面臨頂頭波的船體運(yùn)動(dòng)建模。
6238 4
仿真客 ??? 3年前
為什么最好的機(jī)械臂是7個(gè)自由度而不是6個(gè)? 
現(xiàn)在用的最多的工業(yè)機(jī)器人,一般都是六軸的,但是最近推出來(lái)的人機(jī)協(xié)作機(jī)械臂,卻有7個(gè)自由度,一直想不明白為什么。直到最近看到知乎上的一個(gè)問(wèn)題:人的手臂(腕關(guān)節(jié)到肩關(guān)節(jié))有幾個(gè)自由度?才發(fā)現(xiàn),原來(lái)7個(gè)自由度是對(duì)人手臂的真實(shí)還原。 人的手臂(腕關(guān)節(jié)到肩關(guān)節(jié))有幾個(gè)自由度?我想絕大部分人都沒(méi)有想過(guò),更別說(shuō)去了解有哪幾個(gè)自由度,即使是學(xué)工科的人,也未必能解釋清楚。
2951
非標(biāo)機(jī)械論壇 ??? 4年前
Zemax案例 | 基于Zemax相機(jī)多自由度主動(dòng)對(duì)準(zhǔn)技術(shù)研究 
圖4理想模塊的z?與每個(gè)自由度之間的關(guān)系。
978
摩爾芯創(chuàng) ??? 15天前

大型齒輪減速機(jī)地腳液壓調(diào)平如何精準(zhǔn)校準(zhǔn)? 
3.微調(diào)千斤頂:精確控制千斤頂升降,每次幅度0.1-0.2mm內(nèi),反復(fù)調(diào)整至水平度達(dá)±0.05mm/m以?xún)?nèi)。 五、最終固定復(fù)查 1.緊固地腳螺栓:按扭矩值用扭矩扳手最終擰緊螺栓。 2.復(fù)查水平度:再次測(cè)量,確認(rèn)水平度,檢查千斤頂壓力。 六、持續(xù)監(jiān)測(cè)維護(hù) 1.運(yùn)行期監(jiān)測(cè):運(yùn)行后定期檢查水平度,如每月一次。
1770
博揚(yáng)智能 ??? 5月前
尺寸鏈計(jì)算中組合位置度如何處理? 
,兩孔中心線分別能在Ф0.2的范圍內(nèi)變化;因?yàn)镃基準(zhǔn)帶有 “><”符號(hào),C基準(zhǔn)只約束方向自由度不約束位置自由度,所以?xún)牲S色圓的圓心的連線必須與C基準(zhǔn)保持平行,兩黃色圓可以圓心保持理論正確尺寸作為一個(gè)整體在藍(lán)色圓范圍內(nèi)平移但不能旋轉(zhuǎn),公差帶相對(duì)于ABC基準(zhǔn)的位置是浮動(dòng)的。
3840 1
笑酒仙 ??? 3年前
形位公差基準(zhǔn)及運(yùn)用 
三、自由度與基準(zhǔn)限制一個(gè)物體有6個(gè)自由度。1.基準(zhǔn)限制自由度舉例①一個(gè)平面基準(zhǔn)形體確定的模擬基準(zhǔn)形體建立了一個(gè)基準(zhǔn)平面,它限制了三個(gè)自由度(一個(gè)平移,兩個(gè)旋轉(zhuǎn))。②一個(gè)寬度的基準(zhǔn)形體(兩個(gè)對(duì)立的平行表面)確定的模擬基準(zhǔn)形體建立了一個(gè)基準(zhǔn)中心平面,它限制了三個(gè)自由度(一個(gè)平移,兩個(gè)旋轉(zhuǎn))。
3010
笑酒仙 ??? 2年前
【iSolver案例分享71】非對(duì)稱(chēng)船體梁振動(dòng)分析 
在非對(duì)稱(chēng)船體梁的自由振動(dòng)分析中,對(duì)比 iSolver 與 Abaqus 的計(jì)算結(jié)果:非對(duì)稱(chēng)船體梁
非對(duì)稱(chēng)船體梁第七到十階振型如下圖所示。前六階振型均顯示為零頻率,這是因?yàn)樵?em>自由振動(dòng)分析中,這些振型對(duì)應(yīng)于結(jié)構(gòu)的六個(gè)剛性體自由度,包括三個(gè)平移自由度和三個(gè)轉(zhuǎn)動(dòng)自由度,其固有頻率理論上為零。
2716 1 1
Johnny1688 ??? 1年前
20條/頁(yè) 
 27
27 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
