



在 Qgis 中開發高分辨率 Rusle 模型
概述第 1 部分:簡介第 1 講 課程介紹(宣傳)第 2 講 空間對齊和參數第 3 講:數據源第 4 講 要使用的軟件第 5 講 下載 QGIS第 6 講 啟動 QGIS 項目第 7 講:研究區域 shapefile - 重新投影到 UTM第 2 部分:土壤和土壤侵蝕。
1378
仿真資料吧 ??? 10月前
北京市熱島效應問題,Landsat8數據分析與綠地的關系 
數據來源為北京市2015、2017的Landsat8 OLI-TIRS Level-1數據,已經過系統輻射校正和幾何校正,坐標系為通用橫軸墨卡托投影(universal transverse Mercator,UTM)-WGS84;波段8分辨率為15 m、波段10、11為100 m、其余波段為30 m。使用條帶號123,行編號32的數據,成像日期為2015年5月18日和2017年5月7日。
4664
繪夢流光 ??? 3年前
自動駕駛決策規劃中的問題與挑戰 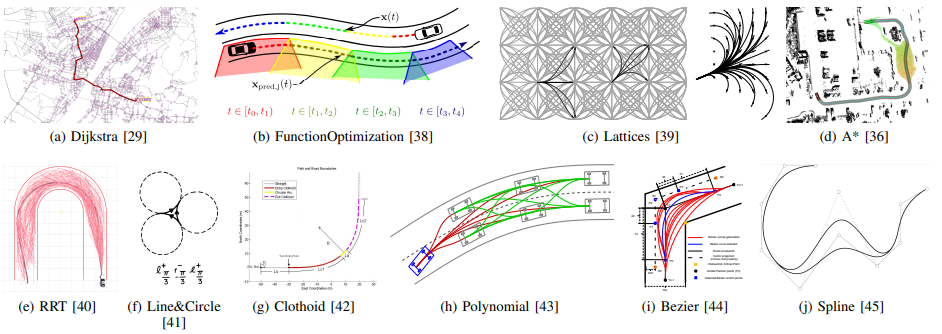
論文將車輛坐標系轉換到了UTM坐標系下,根據定位的高速分布情況和坐標變換公式,就可以計算出車輛周圍環境在定位影響下的不確定性,如上右圖所示,其中顏色越深表示不確定性越大,其不確定性計算公式主要由下式得到。可以發現距離ADC越遠其不確定越高,隨著車輛的前進,其不確定性會被更新。路徑規劃方法采用了Lattice(五次多項式曲線)的方法,在cost計算時,增加了兩個項目。
1994
芝能汽車 ??? 3年前
自動駕駛決策規劃中的問題與挑戰
論文將車輛坐標系轉換到了UTM坐標系下,根據定位的高速分布情況和坐標變換公式,就可以計算出車輛周圍環境在定位影響下的不確定性,如上右圖所示,其中顏色越深表示不確定性越大,其不確定性計算公式主要由下式得到。可以發現距離ADC越遠其不確定越高,隨著車輛的前進,其不確定性會被更新。路徑規劃方法采用了Lattice(五次多項式曲線)的方法,在cost計算時,增加了兩個項目。
2213
駕駛哥 ??? 3年前

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
