



高速工業(yè)汽輪機(jī)臨界轉(zhuǎn)速的仿真計(jì)算及驗(yàn)證 
筆者以某300 MW機(jī)組14 MW給水泵汽輪機(jī)轉(zhuǎn)子為例,分析在設(shè)計(jì)過(guò)程中轉(zhuǎn)子臨界轉(zhuǎn)速設(shè)置的合理性,并且用現(xiàn)場(chǎng)運(yùn)行數(shù)據(jù)進(jìn)行核算。1 臨界轉(zhuǎn)速定義及計(jì)算分析轉(zhuǎn)子動(dòng)力學(xué)主要是研究具有軸向?qū)ΨQ特征的結(jié)構(gòu)在旋轉(zhuǎn)過(guò)程中的振動(dòng)行為。轉(zhuǎn)子的振幅隨轉(zhuǎn)速的增大而增大,到某一轉(zhuǎn)速時(shí)發(fā)生劇烈波動(dòng),轉(zhuǎn)子的振幅達(dá)到最大值,該轉(zhuǎn)速稱為轉(zhuǎn)子的臨界轉(zhuǎn)速。當(dāng)轉(zhuǎn)速超過(guò)臨界轉(zhuǎn)速時(shí),振幅又會(huì)逐漸減小。
4790 4 2
機(jī)械發(fā)明愛(ài)好者 ??? 2年前
轉(zhuǎn)子動(dòng)力學(xué)ansys仿真流程方法 坎貝爾圖 轉(zhuǎn)子動(dòng)力學(xué) 臨界轉(zhuǎn)速 軸承 
轉(zhuǎn)子動(dòng)力學(xué)ansys仿真流程方法工程中的回轉(zhuǎn)機(jī)械,如渦輪機(jī)、電機(jī)等,在運(yùn)轉(zhuǎn)時(shí)經(jīng)常由于轉(zhuǎn)軸的彈性轉(zhuǎn)子偏心而發(fā)生橫向彎曲振動(dòng)。當(dāng)轉(zhuǎn)速增至某個(gè)特定值時(shí),振幅會(huì)突然加大,振動(dòng)異常激烈,當(dāng)轉(zhuǎn)速超過(guò)這個(gè)特定值時(shí),振幅又會(huì)很快減小。使轉(zhuǎn)子發(fā)生激烈振動(dòng)的特定轉(zhuǎn)速稱為臨界轉(zhuǎn)速。工程師要做的就是查找轉(zhuǎn)子系統(tǒng)的臨界轉(zhuǎn)速,從而將系統(tǒng)修改轉(zhuǎn)速或者添加一定的支撐,來(lái)避開(kāi)臨界轉(zhuǎn)速。
6661 27 11
大龍貓?? ??? 2年前
什么是臨界轉(zhuǎn)速?在 COMSOL 中模擬轉(zhuǎn)子軸承系統(tǒng) 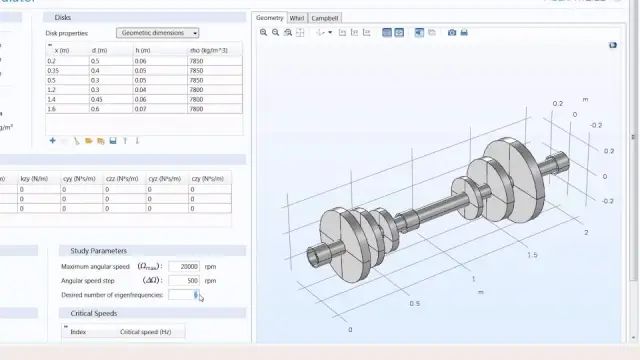
在底層模型中,沒(méi)有直接計(jì)算臨界轉(zhuǎn)速的方法。這就是利用 App 開(kāi)發(fā)器的優(yōu)勢(shì)。使用方法編輯器(在 App 開(kāi)發(fā)器中可用),可以很容易地編寫自己的方法來(lái)計(jì)算臨界轉(zhuǎn)速。在開(kāi)發(fā)轉(zhuǎn)子軸承系統(tǒng)模擬器仿真 App 時(shí)就是這樣操作的。計(jì)算臨界轉(zhuǎn)速的代碼的截圖如下所示。代碼顯示了臨界轉(zhuǎn)速是如何計(jì)算的。然后,計(jì)算出的臨界轉(zhuǎn)速以表格形式顯示在臨界轉(zhuǎn)速部分。
3174 7 4
我是小能 ??? 3年前
轉(zhuǎn)子動(dòng)力學(xué)系列(一):臨界轉(zhuǎn)速與坎貝爾圖 
求該轉(zhuǎn)子臨界轉(zhuǎn)速及振型。
11193 25 10
鐘偉良 ??? 6年前
行星齒輪減速機(jī)如何匹配伺服電機(jī)轉(zhuǎn)速? 
行星齒輪減速機(jī)匹配伺服電機(jī)轉(zhuǎn)速,主要是通過(guò)確定合適的減速比來(lái)實(shí)現(xiàn),具體方法如下: 1.根據(jù)負(fù)載轉(zhuǎn)速要求計(jì)算減速比:減速比(i=frac{伺服電機(jī)額定轉(zhuǎn)速}/{負(fù)載目標(biāo)轉(zhuǎn)速})。例如,負(fù)載需要的轉(zhuǎn)速為100rpm,伺服電機(jī)額定轉(zhuǎn)速為3000rpm,則初步計(jì)算的減速比為30。 2.驗(yàn)證減速機(jī)輸出轉(zhuǎn)速:根據(jù)計(jì)算出的減速比,驗(yàn)證減速機(jī)輸出轉(zhuǎn)速是否滿足設(shè)備需求。
610
博揚(yáng)智能 ??? 1月前
轉(zhuǎn)子動(dòng)力學(xué)系列(九):基于ANSYS Workbench的多軸轉(zhuǎn)子臨界轉(zhuǎn)速 
在不同的載荷步,多軸轉(zhuǎn)子的轉(zhuǎn)速比可以改變,但轉(zhuǎn)速隨載荷步為升序。1. 問(wèn)題描述如下圖所示的多軸轉(zhuǎn)子,轉(zhuǎn)子1和轉(zhuǎn)子2位于XZ平面,轉(zhuǎn)子3與前者不在一個(gè)平面中。各轉(zhuǎn)軸長(zhǎng)度和軸徑以及圓盤厚度和半徑等見(jiàn)圖b、圖c,約束與連接如圖a所示。各轉(zhuǎn)子間的轉(zhuǎn)速比為1:3:2,各軸承剛度K11均為1E9N/m,K22均為2E9N/m。對(duì)此轉(zhuǎn)子系統(tǒng)進(jìn)行模態(tài)分析和臨界轉(zhuǎn)速計(jì)算。
5943 2 1
鐘偉良 ??? 4年前
對(duì)輸入進(jìn)行脈寬調(diào)制來(lái)控制電機(jī)轉(zhuǎn)速的刷式直流電機(jī)驅(qū)動(dòng)器-SS6548D 
SS6548D可通過(guò)對(duì)輸入進(jìn)行脈寬調(diào)制來(lái)控制電機(jī)轉(zhuǎn)速,如果將邏輯輸入設(shè)置為低電平,則芯片會(huì)進(jìn)入低功耗休眠模式,此外針對(duì)故障和短路問(wèn)題提供了全面保護(hù),包括欠壓鎖定(UVLO),過(guò)流保護(hù)(OCP)及過(guò)熱保護(hù)(OTP)其高達(dá)16A的峰值輸出電流和8A持續(xù)電流能力,結(jié)合全面的保護(hù)功能與靈活的PWM控制,可提供高效電機(jī)驅(qū)動(dòng)解決方案。
2979
如果我年少有為 ??? 6月前
電機(jī)多轉(zhuǎn)速工況的NVH分析! 
Workbench平臺(tái)中搭建電機(jī)多物理場(chǎng)耦合的NVH分析流程 然后、在Maxwell中建立電磁場(chǎng)模型,并對(duì)電機(jī)轉(zhuǎn)速進(jìn)行參數(shù)化設(shè)置: 電磁場(chǎng)模型 電機(jī)轉(zhuǎn)速變量 電機(jī)轉(zhuǎn)速參數(shù)化(這里離散為10個(gè)轉(zhuǎn)速工況)
3760 6 1
手寫從前 ??? 4年前
伺服的電機(jī)轉(zhuǎn)矩、功率、轉(zhuǎn)速、電壓、電流換算公式,只要記住這個(gè)就夠了
功率kw轉(zhuǎn)速rpm扭矩Nm0.0530000.16 0.430001.27 0.7530002.39 130003.18 1.230003.82 1.530004.78 電機(jī)扭矩計(jì)算公式 T=9550P
3475 2 1
跟我學(xué)PLC ??? 3年前
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系? 
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系,為電機(jī)運(yùn)行狀態(tài)的監(jiān)測(cè)提供了新的視角。在當(dāng)前數(shù)字化、智能化的工業(yè)環(huán)境中,構(gòu)建這樣一個(gè)指標(biāo)體系不僅能夠提升電機(jī)的可靠性與安全性,也為實(shí)現(xiàn)設(shè)備的智能維護(hù)和管理奠定了堅(jiān)實(shí)基礎(chǔ)。 一、降噪類算法 ·低通濾波:設(shè)計(jì)合適截止頻率的低通濾波器,如巴特沃斯低通濾波器。
2298 1 1
博揚(yáng)智能 ??? 7月前
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系? 
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系,為電機(jī)運(yùn)行狀態(tài)的監(jiān)測(cè)提供了新的視角。在當(dāng)前數(shù)字化、智能化的工業(yè)環(huán)境中,構(gòu)建這樣一個(gè)指標(biāo)體系不僅能夠提升電機(jī)的可靠性與安全性,也為實(shí)現(xiàn)設(shè)備的智能維護(hù)和管理奠定了堅(jiān)實(shí)基礎(chǔ)。 一、降噪類算法 ·低通濾波:設(shè)計(jì)合適截止頻率的低通濾波器,如巴特沃斯低通濾波器。
975
博揚(yáng)智能 ??? 2月前
電機(jī)噪聲來(lái)源以及如何降噪 
軸承的安裝誤差超過(guò)某一臨界值會(huì)使軸承噪聲急劇增大,而臨界角隨軸承徑向游隙減小而減小。圖一表示某單列內(nèi)心軸承在不同徑向游隙時(shí)安裝誤差角對(duì)噪聲的關(guān)系。 3. 電磁噪聲 作用在電機(jī)定、轉(zhuǎn)子空氣隙中的交變電磁力會(huì)使電機(jī)定轉(zhuǎn)子產(chǎn)生振動(dòng)及噪聲。
3037 1 1
聲學(xué)工程師小吳 ??? 2年前
DYROBES 20.2軟件交流學(xué)習(xí)技巧
轉(zhuǎn)子-軸承系統(tǒng)的橫向振動(dòng)計(jì)算分析 通過(guò)分析轉(zhuǎn)子系統(tǒng)應(yīng)變能、動(dòng)能分布情況,判斷轉(zhuǎn)子振型,以及軸承、支撐、轉(zhuǎn)子及其零部件在不同振型下運(yùn)動(dòng)形態(tài)和特征; 通過(guò)臨界轉(zhuǎn)速分析,得到轉(zhuǎn)子臨界轉(zhuǎn)速與支承剛度變化規(guī)律; 通過(guò)伯德圖計(jì)算由不平衡力,軸彎曲或盤傾斜等原因引起的轉(zhuǎn)子系統(tǒng)的穩(wěn)態(tài)同步響應(yīng),可直接在圖中顯示臨界轉(zhuǎn)速及工作轉(zhuǎn)速范圍,以方便校核工作轉(zhuǎn)速是否滿足API中關(guān)于隔離裕度的要求; 通過(guò)非線性諧波響應(yīng)和瞬態(tài)響應(yīng)分析能得到相應(yīng)的軸心軌跡圖
3269
kcenter ??? 3年前
燃料電池系統(tǒng)的空壓機(jī)有什么需求? 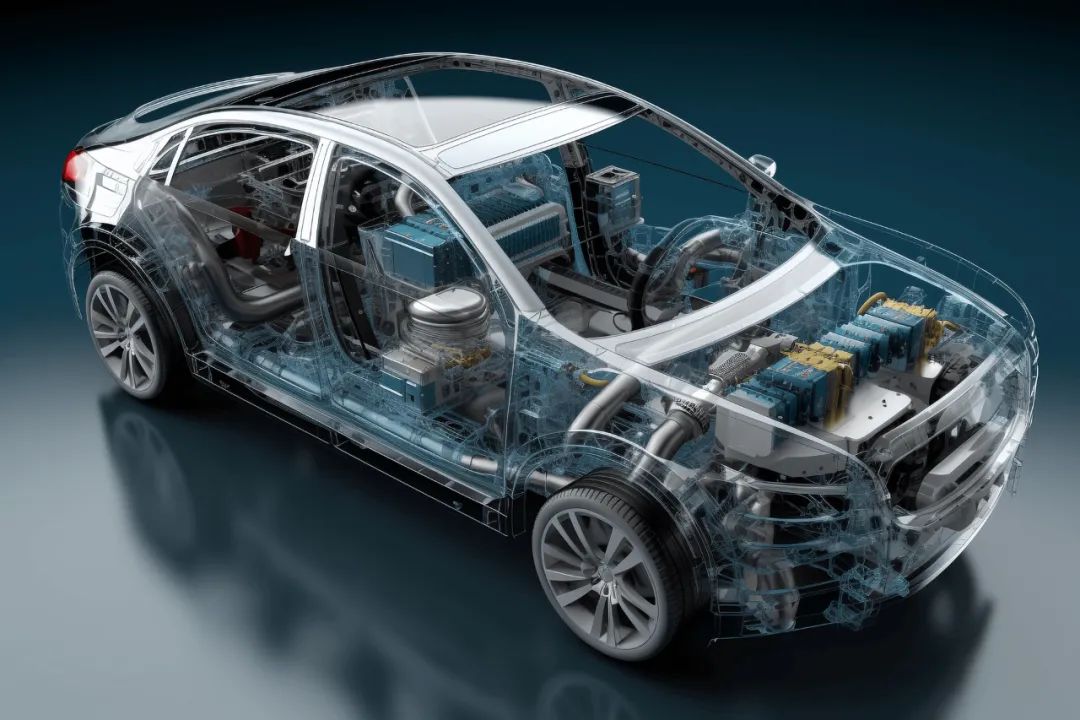
?? 設(shè)計(jì)階段時(shí)準(zhǔn)確計(jì)算轉(zhuǎn)子的臨界轉(zhuǎn)速,使空壓機(jī)的工作轉(zhuǎn)速避開(kāi)轉(zhuǎn)子的臨界轉(zhuǎn)速。
2368
我愛(ài)汽輪機(jī)仿真 ??? 2年前
應(yīng)用沙龍 | 電動(dòng)零部件異響分析參數(shù)方案(三) 
作者:金鵬 HBK中國(guó)區(qū)應(yīng)用服務(wù)經(jīng)理 電機(jī)轉(zhuǎn)速波動(dòng) 即使電機(jī)處于穩(wěn)定運(yùn)轉(zhuǎn)的狀態(tài)下,電機(jī)的瞬間轉(zhuǎn)速仍然會(huì)出現(xiàn)一定程度的波動(dòng)。 當(dāng)這種波動(dòng)現(xiàn)象的頻率比較低時(shí),常常給人帶來(lái)很差的主觀感受。 因此,在試驗(yàn)中需要測(cè)試電機(jī)轉(zhuǎn)速。 當(dāng)被測(cè)電機(jī)較小或其他原因不方便直接測(cè)試轉(zhuǎn)速時(shí),也可采用振動(dòng)噪聲信號(hào)提取出轉(zhuǎn)速。
4987 1
HBK聲學(xué)與振動(dòng) ??? 2年前
燃料電池空壓機(jī)技術(shù)介紹及發(fā)展趨勢(shì) 
對(duì)轉(zhuǎn)子進(jìn)行動(dòng)平衡,使轉(zhuǎn)子的偏心盡可能小; 設(shè)計(jì)階段時(shí)準(zhǔn)確計(jì)算轉(zhuǎn)子的臨界轉(zhuǎn)速,使空壓機(jī)的工作轉(zhuǎn)速避開(kāi)轉(zhuǎn)子的臨界轉(zhuǎn)速; 對(duì)軸承的氣膜和彈性支撐結(jié)構(gòu)進(jìn)行耦合求解和優(yōu)化,得到軸承最佳的剛度和阻尼,盡可能的降低轉(zhuǎn)子的次同步振動(dòng)。
5029
雙螺桿泵 ??? 2年前
無(wú)級(jí)變速減速機(jī)不同負(fù)載,如何精準(zhǔn)匹配轉(zhuǎn)速? 
3.選擇合適電機(jī):若負(fù)載無(wú)需調(diào)速或只需粗略調(diào)速,可選用普通異步電機(jī)配合減速機(jī);若需要精確調(diào)速,如精度要求在±1%以內(nèi),應(yīng)選擇變頻電機(jī)、伺服電機(jī)或步進(jìn)電機(jī)等。對(duì)于高頻啟停或正反轉(zhuǎn)的負(fù)載,需選擇響應(yīng)能力快的伺服電機(jī)或直流電機(jī),以保證轉(zhuǎn)速能快速匹配負(fù)載變化。 4.考慮調(diào)速范圍與精度:參考無(wú)級(jí)變速減速機(jī)的調(diào)速范圍,盡量將轉(zhuǎn)速調(diào)到中間偏上位置,避免因調(diào)速太慢輸出無(wú)力或調(diào)速太快導(dǎo)致電機(jī)過(guò)熱。
1430 5 3
博揚(yáng)智能 ??? 2月前
一文了解電動(dòng)汽車用驅(qū)動(dòng)電機(jī)系統(tǒng)超速試驗(yàn) 
4、超速試驗(yàn)可根據(jù)具體情況選用被試驅(qū)動(dòng)電機(jī)空載自轉(zhuǎn)或原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)法。a)采用被試驅(qū)動(dòng)電機(jī)空載自轉(zhuǎn)的方法:試驗(yàn)時(shí),被試驅(qū)動(dòng)電機(jī)在驅(qū)動(dòng)電機(jī)控制器的控制下,平穩(wěn)旋轉(zhuǎn)至1.2倍最高工作轉(zhuǎn)速,并在此轉(zhuǎn)速點(diǎn)空載運(yùn)行不低于2min。b)采用原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)法:被試驅(qū)動(dòng)電機(jī)不通電,在原動(dòng)機(jī)(測(cè)功機(jī))拖動(dòng)下平穩(wěn)旋轉(zhuǎn)至1.2倍最高工作轉(zhuǎn)速,并在此轉(zhuǎn)速點(diǎn)空載運(yùn)行不低于2min。
2718 1 2
EDC電驅(qū)未來(lái) ??? 3年前
家電產(chǎn)品階次分析知識(shí)和應(yīng)用 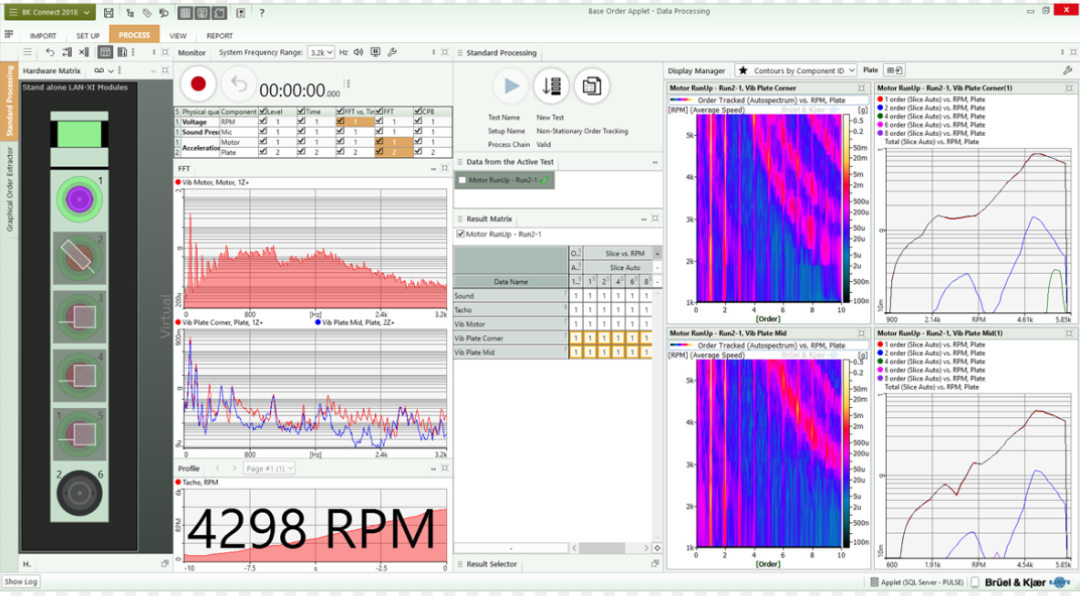
3 階次圖 3.1 瀑布圖 waterfall graph 旋轉(zhuǎn)機(jī)械的轉(zhuǎn)軸部件從啟動(dòng)、升速到額定轉(zhuǎn)速的過(guò)程經(jīng)歷了全部轉(zhuǎn)速的變化,因此在各個(gè)轉(zhuǎn)動(dòng)下的振動(dòng)狀態(tài)可用來(lái)對(duì)機(jī)器的臨界轉(zhuǎn)速、固有頻率等參數(shù)進(jìn)行辨識(shí)。
4434 5 1
聲學(xué)工程師小吳 ??? 2年前
基礎(chǔ)知識(shí):旋轉(zhuǎn)機(jī)械中的階次分析 
瀑布圖旋轉(zhuǎn)機(jī)械的轉(zhuǎn)軸部件從啟動(dòng)、升速到額定轉(zhuǎn)速的過(guò)程經(jīng)歷了全部轉(zhuǎn)速的變化,因此在各個(gè)轉(zhuǎn)動(dòng)下的振動(dòng)狀態(tài)可用來(lái)對(duì)機(jī)器的臨界轉(zhuǎn)速、固有頻率等參數(shù)進(jìn)行辨識(shí)。
4006 14 3
機(jī)械設(shè)計(jì)師 ??? 4年前
20條/頁(yè) 
 33
33 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
