



萬字綜述車載攝像頭 
: 紅綠燈識別及交通標示識別 成本優勢,且算法及技術成熟度比較高 物體識別率高 車載攝像頭分布情況: 資料來源:CIOE中國光博會 目前車上搭載的車載攝像頭根據安裝位置主要分為車載攝像頭主要分為前視攝像頭、環視攝像頭、后視攝像頭、側視攝像頭以及內置攝像頭五種類別
2431 1
木火柴 ??? 4年前
一文淺析ADAS攝像頭分類與功能 
前視攝像頭處的攝像頭數量并不固定,比如特斯拉,配置了三個攝像頭: 前視窄視野攝像頭,最大監測距離 250 米; 前視主視野攝像頭,最大監測距離 150 米; 前視寬視野攝像頭,最大監測距離 60 米。前視攝像頭是ADAS的核心攝像頭,涵蓋測距、物體識別、道路標線等,因此算法復雜,門檻較高。
2433
木火柴 ??? 4年前
經緯恒潤全面布局車載攝像頭,打造智駕、座艙新生態 
· 高精度內參標定技術能力在智能駕駛應用層面,車載攝像頭主要通過內參、外參和畸變系數來保證圖像識別的準確性。其中,內參是每顆攝像頭自身特有的屬性,通過攝像頭組裝產線標定獲得,并儲存在攝像頭內部。
2417 1
經緯恒潤 ??? 3年前
經緯恒潤重磅推出第七代前視單目攝像頭控制器 
· L2+安全功能 (AEB/AES/ELK/DOW/RCTA/RCTB/FCTA/FCTB) 800W像素攝像頭帶來的識別能力的提升,可以更好地應對安全場景。 在前視攝像頭中,新集成了ESA、DOW、RCTA、FCTA功能算法,豐富了單目攝像頭的安全功能配置。
2226
經緯恒潤 ??? 2年前
經緯恒潤800萬像素攝像頭搭載嬴徹科技L3重卡正式量產 
經緯恒潤為嬴徹科技研發的800萬像素高分辨率攝像頭,在車輛前部裝有3顆,主要負責車輛前方視覺感知,鏡頭視場角分別選用30度、60度和120度,視角互補,可感知不同距離的物體。駕駛艙兩側的后視鏡上各有兩顆,分別為60度和120度,負責后方和下方的視覺感知,與整車的毫米波雷達配合,感知路況,消除盲區。經緯恒潤的800萬像素攝像頭產品,能夠幫助車輛更好地識別高速移動的物體、并獲得更好的夜視效果。
2176 1
經緯恒潤 ??? 3年前
iPhone15將采用三星新的屏下攝像頭技術 
挖孔顯示屏是指在產品正面只留下攝像頭孔的技術。挖孔顯示屏早就應用在三星電子智能手機Galaxy系列產品上,蘋果將首次在預計將于今年下半年上市的iPhone14(暫稱)系列Pro機型上采用。 Under Panel Face ID是指在iPhone上進行用戶識別所需的Face ID部位,在不使用此功能時,看起來就像普通顯示屏一樣的技術。
1824
CINNO ??? 4年前
關于自動駕駛路線之爭的一些思考 
(3)攝像頭:被動傳感器,通過被動感光成像來進行識別感知,理論上單攝像頭無法準確識別物體距離,立體攝像頭可以測量距離,但范圍有限,不過實際上特斯拉通過識別算法已經逐步實現了僅通過攝像頭測量物體深度,空間分辨率取決于攝像機的參數,在分辨維度上多于激光雷達和毫米波雷達,可以同時識別到物體顏色等信息,通過物體在圖像上時空信息可以計算速度,同時對物體的分類多樣性更強,且能夠識別車道線等二維結構,但是攝像頭目前在黑暗
1712 1 1
木火柴 ??? 4年前
干貨|自動駕駛系統中感知傳感器實物仿真測試環境構建 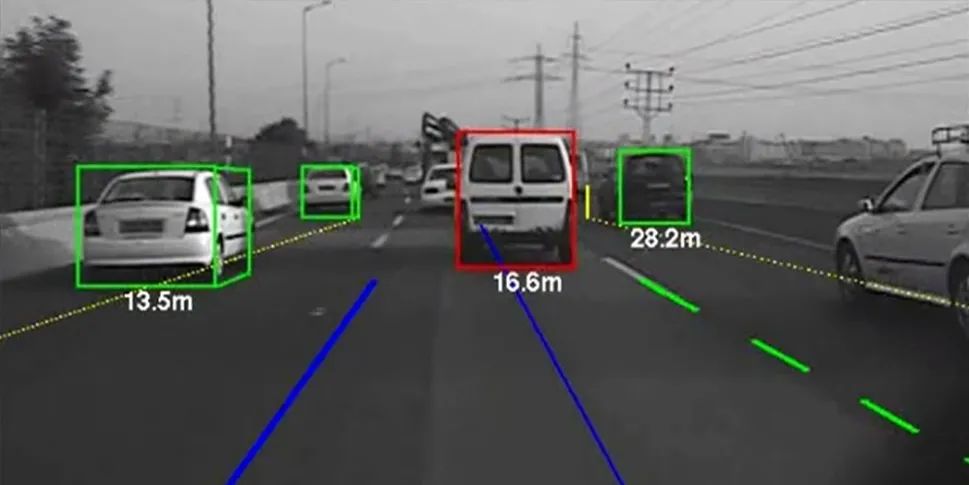
前向攝像頭透過風擋玻璃對車輛前方的環境進行拍攝,前向視覺攝像頭可以識別取景范圍內的車輛、行人、車道線、交通信號燈、交通道路標志等目標。 圖1 視覺攝像頭識別車輛前方場景圖(圖片來源:車元素) 基于上述攝像頭圖像采集和目標處理的原理,針對視覺攝像頭的場景目標模擬仿真可以采用視覺場景再現的方式進行實現。
4045
EDC電驅未來 ??? 2年前
關于自動駕駛路線之爭的一些思考 
(3)攝像頭:被動傳感器,通過被動感光成像來進行識別感知,理論上單攝像頭無法準確識別物體距離,立體攝像頭可以測量距離,但范圍有限,不過實際上特斯拉通過識別算法已經逐步實現了僅通過攝像頭測量物體深度,空間分辨率取決于攝像機的參數,在分辨維度上多于激光雷達和毫米波雷達,可以同時識別到物體顏色等信息,通過物體在圖像上時空信息可以計算速度,同時對物體的分類多樣性更強,且能夠識別車道線等二維結構,但是攝像頭目前在黑暗
1889
木火柴 ??? 4年前
全球最火兩款VR一體機拆解:Neo 3 和 Quest 2誰是VR一哥? 
未來的MR產品將真實世界和虛擬世界融合在一起,需要通過攝像頭將真實世界捕捉進去,這就需要采用彩色攝像頭,進而與虛擬世界用類似的色彩融合在一起。無手柄全身追蹤方案:目前攝像頭布置僅能實現前方的肢體動作捕捉,即手勢識別方案。通過攝像頭對手部空間位置信息進行捕捉,在獲取其位置、形狀等信息后對其進行建模,處理后從一體機屏幕中顯示具體位置。
2623
電子工程世界EEWorld ??? 3年前
基于Python的LSTM進行實時手語識別 
鑒于此,本研究提出了一種基于深度學習的實時手語檢測模型,旨在幫助學生通過攝像頭做出 ASL 手勢,并借助攝像頭識別手勢,進而為學生提供關于所識別語言的反饋。在技術實現方面,本研究采用 OpenCV 和 Mediapipe Holistic 來精準識別姿勢的關鍵標記以及收集相關數據,隨后依據長短期記憶(LSTM)架構進行模型訓練。
1597
320科技工作室 ??? 4月前
沖壓質量模板匹配視覺檢測技術應用 
步驟3:模板圖片和攝像頭圖片進行差異分析,兩個圖片灰度值不一樣的像素點用紅色高亮表示出來,如圖7 所示。由于攝像頭感光元件噪點、環境光源差異、機械振動等原因影響,兩個圖片雖然肉眼識別無明顯差異,但在計算機內存中很多像素點的灰度值還是有差異,需要過濾掉這些噪聲干擾,才能將兩個圖片真實的差異點凸顯出來。
2224
FMMM ??? 4年前
工業機器人的視覺系統該如何選擇?
1、攝像頭攝像頭的選擇與應用的需求直接相關,通常考慮三點: a)黑白還是彩色; b)部件/目標的運動; c)圖像分辨率。 在檢測應用中大部分使用黑白攝像頭,因為黑白圖像能提供90%可視數據,并且比彩色便宜。彩色攝像頭主要用于一些需要分析彩色圖像的場合里。根據部件在檢測時是否移動,決定我們選擇標準隔行掃描攝像頭還是逐行掃描攝像頭。
2022
非標機械論壇 ??? 4年前
萬字長文解析特斯拉自動駕駛體系 
人類視覺感知原理自動駕駛視覺感知方案是效仿人類視覺系統原理,攝像頭便是“汽車之眼”,特斯拉汽車共計采用八個攝像頭分布在車體四周,車身前部有三個攝像頭,分別為前視主視野攝像頭、前視寬視野攝像頭(魚眼鏡頭)以及前視窄視野攝像頭(長聚焦鏡頭),左右兩側各有兩個攝像頭,分別為側方前視攝像頭和側方后視攝像頭,車身后部有一個后視攝像頭,整體實現360度全局環視視野,最大監測距離可以達到250米。
2529
駕駛哥 ??? 4年前
如何看待理想汽車的技術迭代? 
▲圖5.理想的自動駕駛硬件配置迭代 ●感知的配置 感知來看,和特斯拉采用高性能攝像頭作為主要感知來源,包括6顆800萬像素攝像頭和5顆200萬像素攝像頭,對車身周圍及遠距離的360全方位感知。 正前方的兩顆800萬像素攝像頭組合,可實現對120廣角范圍及最遠550米內車輛、行人及錐桶等物體的識別。
2038
芝能汽車 ??? 4年前
奧迪A8駕駛輔助系統 
例如,彩色攝像頭可以區分施工區的黃線和白線。在特別不利的條件下,如在雪地或路面非常臟的情況下,它達到了自己的極限。當這種情況發生時,它會通知司機。 奧迪車道輔助系統的攝像頭除了這個主要功能外,還具有一些重要功能。它為ACC停車和行駛提供了重要的圖像--它可以檢測前方道路上的車輛,并識別它們的信號。它的數據也進入了停車和行車的啟動功能。
2186
木火柴 ??? 4年前
一文讀懂自動駕駛測試全過程 
自動駕駛汽車是集感知、決策和控制等功能于一體的自主交通工具,其中,感知系統代替人類駕駛人的視、聽、觸等功能,融合攝像機、雷達等傳感器采集的海量交通環境數據,精確識別各類交通元素,為自動駕駛汽車決策系統提供支撐。 1、攝像頭 攝像頭按視頻采集方式分為:數字攝像頭和模擬攝像頭兩大類。
1838
木火柴 ??? 4年前
精準高效農業作業,植保無人機顯身手 
精準病蟲害檢測:植保無人機配備的多光譜成像設備可以對農田中的作物進行高分辨率掃描,并通過專業的圖像處理軟件對病蟲害進行精確識別和分析。這種精準的病蟲害檢測方法可以幫助農民及時發現并采取相應措施,防止病蟲害對農田造成損失。 植保無人機的優勢:1、精準農業:植保無人機可以搭載多種傳感器,實時監測植物生長情況,為農業生產提供精準的數據支持。
2329
千尋位置行業應用 ??? 2年前
一文了解面向無人駕駛感知系統的仿真驗證技術 
工具目前支持攝像頭、激光雷達和毫米波雷達三款主流傳感器的物理級仿真。 基于物理的攝像頭模型支持標準鏡頭、魚眼鏡頭和環視多攝像頭的仿真,通過對鏡頭模型、圖像傳感器模型、處理器模型、風擋參數等五十多個物理參數的設置,可以表現出攝像頭成像中如過曝、噪點、畸變、色散等一系列物理現象,實現原始圖像數據輸出。
2606 2 1
Ansys中國 ??? 4年前
汽車智能化浪潮涌起,經緯恒潤全面布局智能座艙領域 
經緯恒潤AR-HUD產品畫面CMS 全稱為“電子外后視鏡”,是智能座艙的“哨兵”,CMS系統將用攝像頭來實現光學后視鏡的功能。與傳統攝像頭相比,CMS可以擴大后視鏡觀測視角,并在夜間等區域增強畫質,給駕駛員帶來更廣闊、更清晰的后視畫面,同時,CMS具備清洗加熱、可手動觸摸調整等功能。
2067 1
經緯恒潤 ??? 3年前
20條/頁 
 11
11 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
