



ADAMS汽車差速器模擬仿真 
具體仿真動圖如下所示: 下圖為差速器兩端車輪角速度數據曲線: 如上圖所示,差速器所在的左右兩輪角速度在轉彎的時候是不相同的,其中Marker_95為轉彎內側車輪,Marker_92為轉彎外側車輪,從圖中看出,外側車輪的角速度大于內側車輪角速度,符合實際情況。
5350 4 1
擺渡人張 ??? 2年前
Adams管路機器人仿真 
PID控制系統的輸入為驅動輪輪心到機器人body中心的距離以及驅動輪輪心的速度: ??? 具體設置如下: a.建立變量: 建立P、I、D變量以及驅動輪輪心到機器人中心的距離(管徑不同,這個距離不同)。
4330 1
擺渡人張 ??? 2年前
托森差速器 
五、托森差速器的應用及發展趨勢 托森差速器廣泛應用于全輪驅動和四輪驅動車輛中,特別是在高性能車型和越野車型中。例如,奧迪Quattro、斯巴魯Symmetrical AWD等車型都采用了托森差速器。 隨著汽車技術的不斷發展,托森差速器也在不斷改進和升級。目前,一些高端車型開始采用電子控制托森差速器,通過電腦控制實現更精確的動力分配和轉速差調節。
3468
杭州擬創(RecurDyn原廠) ??? 1年前
Adams管路機器人仿真
Adams管路機器人仿真 本文通過Adams完成管路機器人建模及仿真,使其可以沿不同管徑的管路運動前進,從而實現管路的檢查及清理。
3751
擺渡人張 ??? 2年前
ABB機器人編程基本知識匯總 附ABB機器人操作手冊中文版下載 
·max速度為v5000,Base模塊中定義最大速度為v7000,最大速度機器人未必能達到。(2)轉彎區尺寸選擇:mm·將光標移至轉彎區尺寸數據處,按回車鍵,進入選擇窗口,選擇所需轉彎區尺寸。·機器人轉彎區尺寸屬于數據類型zonedata?!こS?em>轉彎區尺寸在Base模塊中已經定義。·特殊轉彎區尺寸可自行定義。
2630
耐思 ??? 4年前
【分析示例】CADfil-管道-纏繞概述 
管道的纏繞不適合低角度(小于30度),因為這涉及到在端帽上纏繞。對于這樣的應用,Cadfil-Lite很適合。自動計算繞線厚度和繞線次數。每一層的計算都考慮了前一卷的厚度,以確保帶的圖案和纖維角度總是最優的。對于轉彎長度,與繞組的角度是變化的結束是自動計算。在某些應用中,這種長度被認為是浪費,因為它在纏繞后被切斷。
2244
上海庭田信息科技有限公司 ??? 2年前
基于ADAMS的點按手法運動仿真 
(2)利用ADAMS中的工具得到了機器人手臂各個關節角的角度隨時間變化曲線,以及具體的角度數值值,可為以后在物理樣機上控制機器人手臂實現點按手法提供數據支持。文章來源:工程機械
3012 2
擺渡人張 ??? 2年前
福特汽車使用Adams開發創新的懸架設計 
為了開發創新的懸架系統,福特汽車動力學團隊創建了具有柔性扭梁的 Adams Car 模型。Adams Car 是在Adams 框架基礎上開發的基于模板的車輛建模解決方案。使用 Adams Car 的工程師可以構建車輛系統或子系統的虛擬樣機,并通過車輛工況庫測試其性能。在扭力梁懸架模型中,輪轂、前框架和前下部控制臂均建模為柔性體。
2474 1 1
Cruise ??? 3年前
拒絕宕機:讓管道機器人在惡劣工況下實現“零接觸無線”安全充電
在西北戈壁的輸煤管廊中,巡檢機器人緩緩駛入充電區,15分鐘內便完成能量補給,再度投入24小時不間斷巡檢——這一切得益于工業級無線充電技術的突破。在石油管道、城市管廊等極端環境中,傳統的接觸式充電方式面臨電極氧化、火花風險等諸多挑戰。無線充電技術的出現,為管道機器人提供了全新解決方案,創造了真正意義上的“無線自由”。
2530
魯渝能源無線充電 ??? 7月前
設計仿真 | 基于ODYSSEE人工智能CDC模型集成的整車動力學仿真 
Adams和ODYSSEE的集成工作流程如下所示01Adams懸架模板中創建CDC阻尼力,定義系統狀態變量作為信號傳遞紐帶,建立整車模型動力學響應信號與CDC阻尼力控制信號的關聯;02Adams整車模型確定當前時刻車速、車身加速度、車身俯仰、車身側傾、轉向值,作為輸入信號傳遞到ODYSSEE的FMU模型中;03ODYSSEE的FMU模型接收上述輸入信號,基于機器學習模型快速計算相應參數下
2385
海克斯康設計與仿真 ??? 11月前
移動機器人的分類及介紹
一、輪式機器人 輪式機器人是移動機器人中較為常見的類型,具有結構相對簡單、運動高效且穩定的特點。 差速驅動機器人:這種機器人主要依靠兩個獨立控制的輪子來實現移動。在室內環境如辦公室、倉庫等場景中應用廣泛。其工作原理基于兩個輪子的速度差來實現轉向,例如在清潔機器人領域,差速驅動機器人能夠靈活地在家具之間穿梭,對地面進行清掃和吸塵作業。
2753
探索者第2號前來報到 ??? 1年前
??怂箍殿I跑人形機器人研發 
02控制策略仿真與驗證海克斯康的解決方案支持控制策略的仿真與驗證,包括關節驅動控制策略和人形機器人穩定性控制策略開發。通過將Easy5控制算法與Adams的運動仿真模型進行協同驗證,研發人員可以快速測試和優化控制策略,確保機器人在各種運動狀態下的穩定性和響應性能。這種協同驗證方式能夠有效縮短研發周期,降低研發成本。
3242 1 1
??怂箍翟O計與仿真 ??? 1年前
【技術貼】使用VSM?實現車輛操穩的精準控制 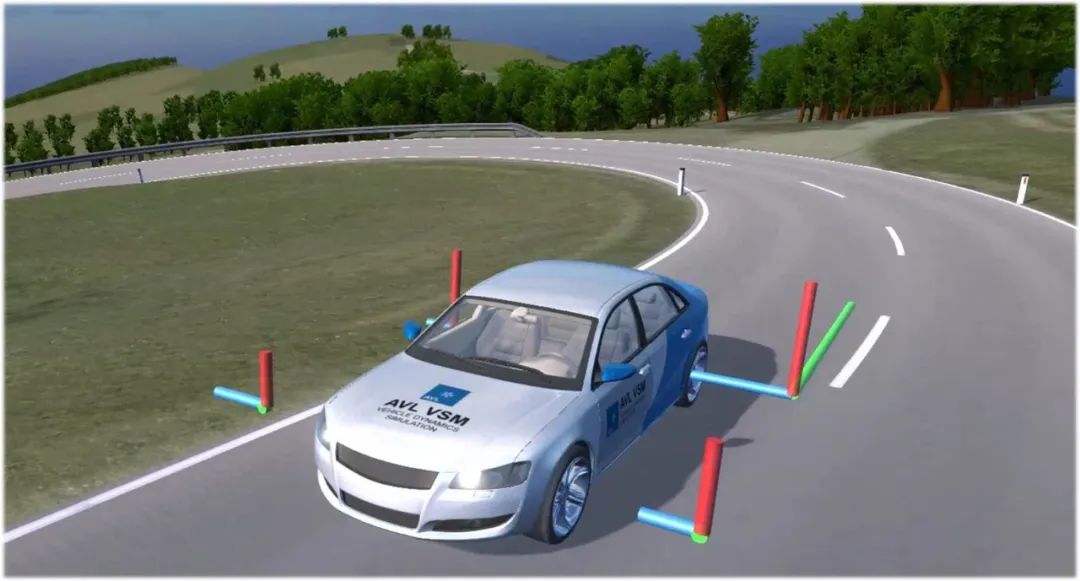
在車輛過彎行駛過程中,通過電機驅動控制改變內外側驅動力,產生橫擺力偶矩,進一步提高汽車的操縱穩定性,這種在動態行駛中調節單個車輪力的控制功能通常稱為扭矩矢量(Torque Vectoring)控制,采用該技術在保證車輛高速轉彎行駛的安全性的同時,可以減少傳統通過制動力參與調節車輛穩定性而帶來的能量損失及制動系統的磨損。
10051 2
AVL先進模擬技術 ??? 3年前
閥門、自動化儀表、DCS控制系統專業術語 
29.連接形式閥門與管道或機器設備的連接所采用的各種方式(如法蘭連接、螺紋連接、焊接連接等)。閥門零部件術語1.閥體與管道(或機器設備)直接連接,構成介質流通流道的零件。2.閥蓋與閥體相連并與閥體(或通過其它零件,如隔膜等)構成壓力腔的主要零件。
2446
閥門圈 ??? 3年前
從事汽車設計的人都把這些動圖收藏了! 
噴射壓力也進一步提高,使燃油霧化更加細致,真正實現了精準地按比例控制噴油并與進氣混合,并且消除了缸外噴射的缺點。同時,噴嘴位置、噴霧形狀、進氣氣流控制,以及活塞頂形狀等特別的設計,使油氣能夠在整個氣缸內充分、均勻的混合,從而使燃油充分燃燒,能量轉化效率更高。因此有人認為缸內直噴式汽油發動機是將柴油機的形式移植到汽油機上的一種創舉。
2305 2
飛屋瀑布 ??? 4年前
一文解析自動駕駛汽車決策控制系統技術 
車載智能計算平臺主要完成的功能是以環境感知數據、導航定位信息、車輛實時數據、云端智能計算平臺數據和其他V2X交互數據等作為輸入,基于環境感知定位、智能規劃決策和車輛運動控制等核心控制算法,輸出驅動、傳動、轉向和制動等執行控制指令,實現車輛的自動控制,并向云端智能計算平臺及V2X設備輸出數據,還能夠通過人機交互界面,實現車輛駕駛信息的人機交互。
2288
木火柴 ??? 4年前
小米發布仿生四足機器人“鐵蛋”!解讀背后的建模和仿真技術 
首先,利用SolidWorks建立四足機器人的三維模型,在Adams中建立虛擬樣機,設置環境模擬量模擬四足機器人在現實環境中的運動和狀態。然后,為實現四足機器人穩定行走,需要實時地對四足機器人狀態進行分析和控制。Adams和Matlab的聯合仿真可實現這一過程。整個過程中Adams虛擬樣機作為被控制對象,需要從Matlab中獲得驅動數據。
2920
深圳北鯤云計算有限公司 ??? 3年前
模糊邏輯 |介紹 
它用于大公司業務中的決策支持系統和個人評估。 它在化學工業中可用于控制 pH 值、干燥、化學蒸餾過程。 模糊邏輯用于自然語言處理和人工智能中的各種密集型應用程序。 模糊邏輯廣泛用于現代控制系統,例如專家系統。 Fuzzy Logic 與 Neural Networks 一起使用,因為它模仿了一個人的決策方式,只是速度要快得多。
2662 1
仿真資料吧 ??? 1年前
Adams FMI聯合仿真助力福特汽車優化燃油經濟性和NVH性能 
在Adams/Driveline中創建了一個傳動系統模型,包括一臺帶有三個支架的I4汽油渦輪增壓直噴(GTDI)發動機,一個帶鎖止離合器的液力變矩器,一個帶內軸和行星齒輪組的六速變速箱,以及一個帶有差速器、連接軸、半軸、萬向節和車輪的前傳動系統。 該傳動系統模型使用Adams/Car集成到整車模型中。整車模型包括底盤、懸架、轉向、剎車和車輪子系統。
2617
Cruise ??? 3年前
六軸碼垛機器人admas正逆運動學仿真 
打開后處理模塊中的各關節角度曲線,利用Spline樣條函數采樣工具對各曲線采集樣點數據,并將采集的樣點數據作為各關節驅動的輸入參數。 刪除掉前面在機器人手腕末端添加的一般點驅動,將圖中各曲線分別轉換為Spline曲線。
2373
余俊煒 ??? 3年前
20條/頁 
 50
50 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
