



基于workbench曲柄搖桿鉸接運(yùn)動副的使用和瞬態(tài)疲勞仿真 

一講:模型介紹第二講:網(wǎng)格劃分第三講:Joint鉸接接觸設(shè)置第四講;Joint load載荷加載第五講;Fatigue疲勞工具添加與使用第六講:后處理附件包括本案例源文件和視頻講解
9
憶森 ??? 5年前
ANSYS APDL里面beam188和link8怎么鉸接?
2180 3 2
&_9224 ??? 3年前
鉸接坦克:冷戰(zhàn)時期瑞典UDES坦克裝甲車研制項目全解析 
所謂鉸接坦克就是將前后車體一刀兩斷,但卻藕斷絲連,用鉸接機(jī)構(gòu)連在一起,使其能夠在各種地形上行駛。圖片:在Bv206裝甲車底盤基礎(chǔ)上搭建的UDES XX5鉸接坦克樣車其實是一輛機(jī)動演示車,除了底盤是真的外,所有上層車體包括炮塔和火炮都是模型。瑞典人首先推出的是UDESXX5鉸接坦克試驗車。
6606
飛天豬主 ??? 3年前
請教一下如何在LS-Prepost中正確定義鉸接(Joint)?
我用LS-Prepost作為前后處理,設(shè)計了如下兩個小球相撞的場景:施加了Z方向重力場(LOAD_BODY_Z),小球通過鋼索吊起,鋼索(梁單元)和小球(實體單元)通過CONSTRAINED_RIGID_BODIES連接。一個小球傾斜一定角度,在重力和初速度(INITIAL_VELOCITY_NODE)下撞向另一個小球,鉸接方式用了CONSTRAINED_JOINT_REVOLUTE。
1864 1 2
EvanHNU ??? 4年前
ABAQUS建模中如何模擬鋼桁架與柱鉸接連接、彈性連接、滑動連接
剛接、鉸接、彈性連接、滑動連接這四種連接方式如何模擬?
2381 1 2
用戶_38989 ??? 2年前
鋼結(jié)構(gòu)工程中外露式柱腳常見做法及有關(guān)規(guī)定 
鋼結(jié)構(gòu)建構(gòu)筑物采用的柱腳類型按其位置分為外露式、外包式、埋入式和插入式四種;按其受力情況又可分為鉸接柱腳和剛接柱腳兩類。其中埋入式、插入式或外包式柱腳三種類型在結(jié)構(gòu)設(shè)計中通常假定為剛接柱腳,而外露式柱腳根據(jù)需要即能設(shè)計成剛接柱腳,也能設(shè)計成鉸接柱腳。外露式柱腳具有設(shè)置靈活、施工方便、直觀、便于維護(hù)等特點,是鋼結(jié)構(gòu)建構(gòu)筑物中廣泛采用的一種柱腳形式。
6405 2
學(xué)土木的搬磚人 ??? 2年前
直升機(jī)能飛起來,全靠這個復(fù)雜機(jī)構(gòu)! 
按槳葉與槳轂連接方式的不同,旋翼大體上分為鉸接式、無鉸式、半無鉸式和無軸承式4種。01 鉸接式旋翼▼鉸接式旋翼(又稱全鉸接式旋翼)是通過槳轂上設(shè)置揮舞鉸、擺陣鉸和變距鉸,使每片槳葉自由地進(jìn)行揮舞、擺動和改變槳距。典型的鉸接式槳轂鉸的布置順序(從里向外)是揮舞鉸、擺振鉸、變距鉸。鉸接式槳轂構(gòu)造復(fù)雜,維護(hù)檢修的工作量大,疲勞壽命低。
2899
機(jī)械學(xué)霸 ??? 3年前
STKO助力OpenSEES系列:自復(fù)位支撐框架靜力循環(huán)pushover分析 
element, 其本質(zhì)上就是有三個單元拼裝而成,中間主單元,兩邊為零長度單元,通過對零長度單元賦予不同的材性,實現(xiàn)不同平動和旋轉(zhuǎn)的彈簧,自然也可以實現(xiàn)僅在ry 方向?qū)崿F(xiàn)鉸接,其他方向保持剛接,如下圖所示為hingebeam 單元對應(yīng)截面屬性的賦予。
5144 16 7
OpenSEES抗震筆記 ??? 4年前
圖解 | 鋼結(jié)構(gòu)各構(gòu)件和做法大全 
b.剛接-支撐框架:橫向采用剛接,縱向采用鉸接,并在縱向設(shè)置支撐,以傳遞水平力。c.支撐式框架:縱橫向均采用鉸接,兩向均設(shè)置支撐傳遞水平力。d.有時為保證足夠的剛度,在剛接框架中亦設(shè)置支撐。框架柱框架柱可采用H型截面、箱形截面、十字形截面、圓管形截面等。所有上部結(jié)構(gòu)的力都通過框架柱傳遞給基礎(chǔ)。框架梁框架梁一般采用H型截面。
5488 2
魯班施工 ??? 3年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯的邊界條件 
四點受彎梁作為結(jié)構(gòu)工程常見的有限元模擬試件,其邊界條件通常是一端固定鉸支座,一端活動鉸支座,然而這種簡單的結(jié)構(gòu)力學(xué)概念在ABAQUS有限元模擬中卻常常出現(xiàn)意想不到的錯誤,今天就和喵星人一起看看吧。
1152
會CAE的喵星人 ??? 6月前
銅線和鋁線不能接在一起,非要接怎么辦? 
銅鋁過渡接頭銅線和鋁線連接時為什么用銅鋁過渡線夾?1. 在銅線和鋁線連接處所生成的灰白色物質(zhì)系三氧化二鋁時間稍長,連接處接觸電阻會增大、發(fā)熱,造成電路時通時斷極易引發(fā)建筑物火災(zāi)。所以要用專用的銅鋁過渡線夾。避免產(chǎn)生不必要的麻煩!銅鋁線連接器件(俗稱“銅鋁鼻子”)2. 如果直接將銅線和鋁線鉸到一起,接頭很容易氧化,導(dǎo)致電阻增大,從而更容易燒壞。
2033
電力講壇 ??? 3年前
為什么銅線和鋁線不能接在一起,非要接怎么辦? 
問題:銅線和鋁線連接時為什么用銅鋁過渡線夾?1.在銅線和鋁線連接處所生成的灰白色物質(zhì)系三氧化二鋁時間稍長,連接處接觸電阻會增大、發(fā)熱,造成電路時通時斷極易引發(fā)建筑物火災(zāi)。所以要用專用的銅鋁過渡線夾。避免產(chǎn)生不必要的麻煩!銅鋁線連接器件(俗稱“銅鋁鼻子”)2.如果直接將銅線和鋁線鉸到一起,接頭很容易氧化,導(dǎo)致電阻增大,從而更容易燒壞。
2585
機(jī)械發(fā)明愛好者 ??? 4年前
電機(jī)銘牌Y、△星三角接法的說明,搞清楚后不再燒電機(jī) 
我們不考慮功率因數(shù)和效率,三相電機(jī)的額功率就等于: 功率、電壓、電流關(guān)系我們分析下電機(jī)正常工作時和剛啟動的繞組電流對比,電機(jī)還是如上圖的參數(shù),假設(shè)△啟動電流為I△,那么Y型啟動電流為1/3 I△,當(dāng)轉(zhuǎn)速起來后,對于同功率P下的繞組電流:380V電壓對于Y型接法,采用三相380V的工業(yè)用電,啟動電流1/3I△,正常電流就等于P/(3*220)對于△型接法,采用三相380V
2987
電力講壇 ??? 4年前
喵星人嘔心瀝血總結(jié)ABAQUS易出錯的邊界條件 
并對參考點設(shè)置固定鉸接邊界條件。</p><p>需要注意的是,參考點具有轉(zhuǎn)動自由度,為實現(xiàn)支座鉸接,必須釋放UR1自由度,同時約束UR2和UR3自由度。
3081 27 14
會CAE的喵星人 ??? 9月前
為什么銅線和鋁線不能接在一起,非要接怎么辦? 
要想接在一起,必須用銅鋁過度線夾或過度線管。
1954
電工電氣一網(wǎng)通 ??? 4年前
beam188怎么添加初應(yīng)變?
至于為什么不用link單元,因為我這個拉索兩端有固結(jié)和鉸接的情況,link單元貌似只能鉸接
2171 1 2
用戶_34549 ??? 2年前
基于workbench鉸鏈連接運(yùn)動副鉸接疲勞操作教程 
第一講:模型介紹第二講:網(wǎng)格劃分第三講:Joint鉸接接觸設(shè)置第四講;Joint load載荷加載第五講;Fatigue疲勞工具添加與使用第六講:后處理附件包括本案例源文件和視頻講解
5
憶森 ??? 5年前
案例42-用通用接觸建模的導(dǎo)線壓接 
重點介紹了以下特性和功能: ? 自動生成通用接觸單元 ? 觸點特性定義 ? 通過通用接觸建模的剛-柔接觸和柔-柔接觸,包括面-面和邊-面接觸配置 介紹 在此示例中,多股導(dǎo)線通過稱為壓接的機(jī)械變形過程連接到電氣端子(連接器)。連接器的U形部分(把手)通過剛性沖頭圍繞電線折疊,形成B形壓接,該壓接提供電線和電端子之間的連接。
2713 1
龍飛宇 ??? 3年前
基于Simpack轉(zhuǎn)K3型轉(zhuǎn)向架斜楔減振的建模方法 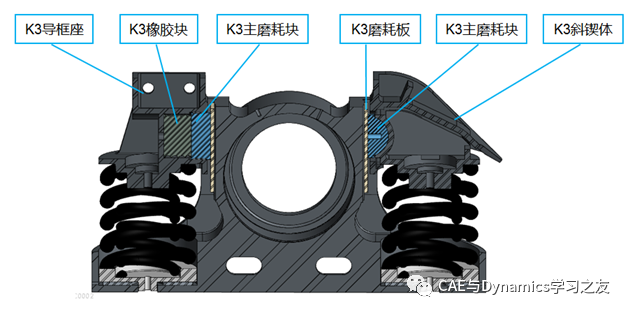
斜楔的鉸接。 鉸接在軸箱上,使用25號鉸,只放開三個平動自由度,約束轉(zhuǎn)動自由度。 2. 斜楔的約束 (1)主摩擦面(斜楔與軸箱之間的接觸面)處的約束。由于在重力分量的作用下,斜楔與軸箱始終是接觸的,因此主摩擦面只限制x方向平動,其余放開(其實也只放開了y、z方向,在定義鉸接時,就沒考慮轉(zhuǎn)動自由度)。
2822 4 3
泡沫oO ??? 2年前
ABAQUS柔性支撐裝配式鋼框架結(jié)構(gòu)推覆/pushover計算 
建模全過程演示兩節(jié)課程:①部件創(chuàng)立、材料性能、裝配;②網(wǎng)格、相互作用、邊界同條件裝配式結(jié)構(gòu)的柔性支撐,單邊螺栓節(jié)點:柔性支撐的簡化建模方式以及準(zhǔn)確性驗證方法,單邊螺栓節(jié)點的簡化建模方式
框架結(jié)構(gòu)的邊界條件:剛接、鉸接、實際邊界條件的模擬方式收斂性:結(jié)構(gòu)模型不收斂怎么辦?調(diào)整方法有哪些?后處理結(jié)果:教你怎么出圖好看,以及出圖的技巧
3865
一個甜甜圈 ??? 2年前
20條/頁 
 13
13 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
