



考慮多因素影響的光伏發電功率智能預測研究 
根據式(2)計算光伏發電功率與影響因素之間的相關系數,根據相關系數得到影響因素權重值,如表1所示。
4292 1 1
能源阿陽 ??? 2年前
自動駕駛4WS車輛路徑跟蹤最優控制算法仿真 
根據這兩個區域的線性特性分別建立兩個不同參數的二自由度車輛方程,并基于這兩個方程設計權系數后輪最優控制算法。
2484
駕駛哥 ??? 4年前
流體有限元求解器開發-SUPG迎風格式與SA湍流模型 
Hughes T J RSUPG的核心思想我們前面文章介紹的伽遼金法,在推導過程中,令權函數=插值函數。在對流主導情況下,這種對稱處理無法捕捉流動的方向性特征,因此迭代過程中,速度場逐漸發散。SUPG的核心思想,是修改權函數,引入迎風效應。增加的項一個只在流線方向上起作用的項。我的理解是人工給一個收斂的方向。
839
靜界有限元 ??? 18天前
瞬態熱傳導有限元求解器開發 
(2) 已知邊界對流換熱系數和接觸環境溫度,也屬于第二類邊界條件。這個邊界條件在處理的時候,需要進行拆分,一部分放到左側單元矩陣,一部分作為右側的載荷。有限元思路這部分在結構有限元教材中介紹的比較多,流程:(1) 根據單元類型,確定插值函數。此時單元溫度用權函數表達。(2) 采用伽遼金方法,權函數=插值函數,控制方程與權函數相乘,積分取0。
2537 1
靜界有限元 ??? 3月前
OCAD應用:三組元連續變焦系統 
圖13.自動換根及線性運動選擇功能界面 ② 初級像差系數自動平衡 完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖14。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。參加優化設計的初級像差項目可選,選擇時使用工具條上插入和刪除按鈕進行操作。
2072
追光ing ??? 3年前
OCAD:三組元連續變焦系統 
圖14.自動換根及線性運動選擇功能界面(2)初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖14。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。參加優化設計的初級像差項目可選,選擇時使用工具條上插入和刪除按鈕進行操作。
2024
追光ing ??? 11月前
Ansys Zemax | 內窺鏡物鏡系統初始結構的優化提升(下) 
隨后,在鏡頭數據編輯器中將系統所有透鏡的曲率半徑、第7、8面之間的厚度、第8面的圓錐系數設為變量,點擊執行優化。設置的變量也可以根據實際情況而修改,本例為了使得系統的總長度不發生太大的變化,沒有把所有的厚度都設為變量。 在優化過程中,可能還會有一些小的改動,比如修改不同操作數的權重值,或者根據優化后的系統變化添入新的操作數,這些都可以根據實際情況來定。
2364 1
宇熠科技 ??? 2年前
OCAD應用:凸輪曲線優化設計 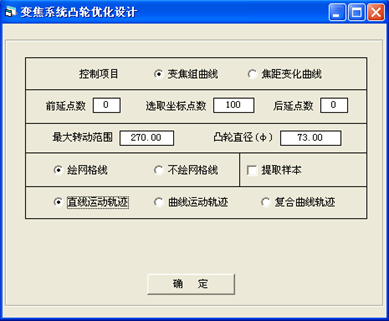
當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。圖11.選擇曲線運動軌跡的凸輪優化設計窗體以上選擇確定或數據填寫完畢之后,只要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖12。
1721
信光嗎 ??? 2月前
OCAD應用:凸輪曲線優化設計 
當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。 圖11.選擇曲線運動軌跡的凸輪優化設計窗體 以上選擇確定或數據填寫完畢之后,只要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖12。
2268
畫屏 ??? 1年前
OCAD應用:五組元連續變焦系統 
圖3.變焦系統變焦運動動畫圖4.填寫初級像差系數② 初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖5。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。
764
信光嗎 ??? 1月前
OCAD應用:五組元連續變焦系統 
圖3.變焦系統變焦運動動畫 圖4.填寫初級像差系數 ② 初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖5。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。
2047
追光ing ??? 3年前
OCAD應用:凸輪曲線優化設計 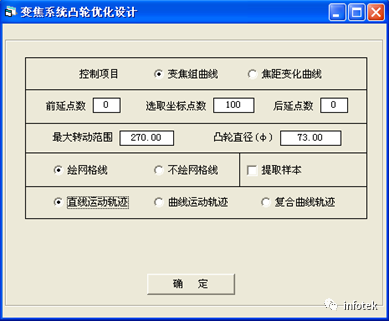
當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。圖11.選擇曲線運動軌跡的凸輪優化設計窗體以上選擇確定或數據填寫完畢之后,只要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖12。
1758
追光ing ??? 11月前
OCAD應用:凸輪曲線優化設計
當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。圖11.選擇曲線運動軌跡的凸輪優化設計窗體以上選擇確定或數據填寫完畢之后,只要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖12。
2785
追光ing ??? 10月前
OCAD應用:五組元連續變焦系統 
圖3.變焦系統變焦運動動畫圖4.填寫初級像差系數 ② 初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖5。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。
2188
追光ing ??? 1年前
OCAD應用:凸輪曲線優化設計
當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。圖11.選擇曲線運動軌跡的凸輪優化設計窗體以上選擇確定或數據填寫完畢之后,只要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖12。
1740
追光ing ??? 1年前
OCAD:五組元連續變焦系統 
圖3.變焦系統變焦運動動畫圖4.填寫初級像差系數(2)初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖5。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。
1211
追光ing ??? 11月前
OCAD應用:四組元連續變焦系統 
圖3.變焦系統變焦運動動畫② 初級像差系數自動平衡完成外形尺寸計算后就可以接著進行系統初級像差的平衡優化設計。此時按“下一步”命令鈕,窗體立即出現下一個畫面如圖4。其中列出兩個表格,一個是要求輸入各初級像差系數的目標值,另一個要求輸入系統各組元的PW參數的初始參考值及其權系數。
909
信光嗎 ??? 1月前
干貨分享--響度感知 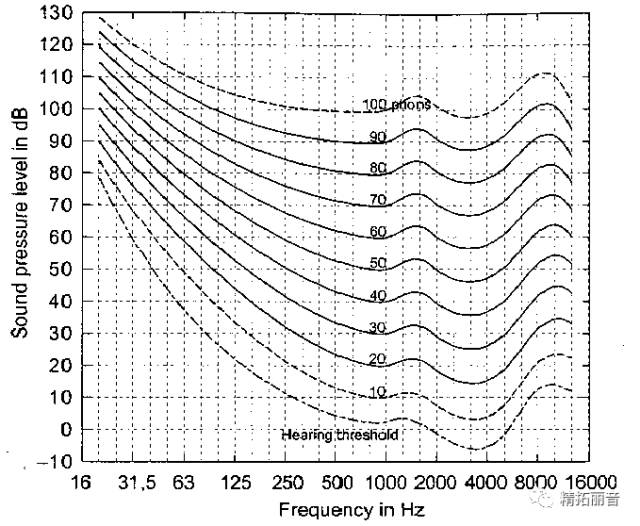
為了更準確的評估復雜聲音的強度,聲級計里面都加入了計權網絡,對各頻段聲音加權后求和。使用等響曲線近似形狀,比如“A”計權就是使用40方等響曲線的近似形狀,低頻聲對總體響度貢獻度小,計權系數較低。“B”計權則是使用70方的等響曲線,“C”計權則是使用100方的等響曲線來來加權計算。目前B計權幾乎不用,使用最多的是A計權方式的測量,單位為dBA或dB(A)。下圖是A,C計權曲線。圖2.
3407
聲學工程師小吳 ??? 3年前
混凝土塑性損傷模型 
image_process=/format,webp" data-initial-src="https://img.jishulink.com/202407/attachment/015e07b340eb47c4b00d544f68c33e12.png">
</figure>
</div><p><em>ωt</em>、<em>ωc</em>為材料性質的權,控制往復荷載作用下材料<span
3378 2
Suhence ??? 1年前
汽車消聲器連結法蘭盤沖壓成形工藝參數優化 
圖3 BP 網絡的預測 3 結合遺傳算法的工藝參數優化使用遺傳算法優化BP神經網絡的權值和閾值[8],種群中的每個個體都包含了一個網絡所有權值和閾值,個體通過適應度函數計算個體適應度值,遺傳算法通過選擇、交叉和變異操作找到最優適應度值對應個體[9]。本次遺傳算法尋優屬于無目標函數條件下的尋優計算,不需要利用BP神經網絡擬合得到目標函數的表達式。
4618 6 1
金屬加工前沿 ??? 2年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
