



基于optistruct汽車控制臂三種工況、加上1階模態(tài)下的多目標拓撲優(yōu)化案例 
本例以汽車控制臂三種工況、加上1階模態(tài)下的多目標拓撲優(yōu)化為例,講述在optistruct中是如何進行多目標拓撲優(yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學也可以聯(lián)系我,有相關(guān)的資料購買后對于模型中不懂的地方都可以問
2225 1 9
lz1234 ??? 3年前
基于多工況加權(quán)柔度響應的汽車控制臂拓撲優(yōu)化 
“多工況加權(quán)柔度響應”指的是將結(jié)構(gòu)在多種不同載荷工況下的柔度(Compliance) 進行加權(quán)求和,作為拓撲優(yōu)化的目標函數(shù)或約束條件。柔度是剛度的倒數(shù),柔度越小,意味著剛度越大。一、核心概念解析1. 拓撲優(yōu)化(Topology Optimization):· 一種結(jié)構(gòu)優(yōu)化方法,用于確定結(jié)構(gòu)內(nèi)部孔洞的數(shù)量、位置和形狀以及連接方式,從而得到最優(yōu)的材料布局。
598
320科技工作室 ??? 5天前
Optistruct多工況優(yōu)化目標函數(shù)如何進行修正,以控制優(yōu)化結(jié)果 

本課適合哪些人學習:1、optistruct拓撲優(yōu)化設(shè)計人員2、理工科學子和老師3、學習型仿真工程師4、結(jié)構(gòu)優(yōu)化、參數(shù)化優(yōu)化,拓撲優(yōu)化學習者你會得到什么:optistruct 多工況優(yōu)化目標函數(shù)如何進行修正,以控制優(yōu)化結(jié)果。
1161 1
張先 ??? 3年前
基于optistruct汽車控制臂多工況拓撲優(yōu)化 
汽車控制臂三種工況下的多目標拓撲優(yōu)化為例,講述在optistruct中是如何進行多目標拓撲優(yōu)化,從而滿足特定要求下汽車控制臂的概念設(shè)計。對于單目標拓撲優(yōu)化你會發(fā)現(xiàn)每一種工況下拓撲優(yōu)化的結(jié)果不一樣,多目標拓撲優(yōu)化則綜合考慮多種工況下的目標得到一個綜合結(jié)果。 對于多目標優(yōu)化常用的手段:1、將目標轉(zhuǎn)化為約束條件;2、對多目標采用加權(quán)的方法得到一個綜合目標。
1073 9
CAE行路人 ??? 6年前
AMESim電控單體泵高速電磁閥多目標優(yōu)化分析 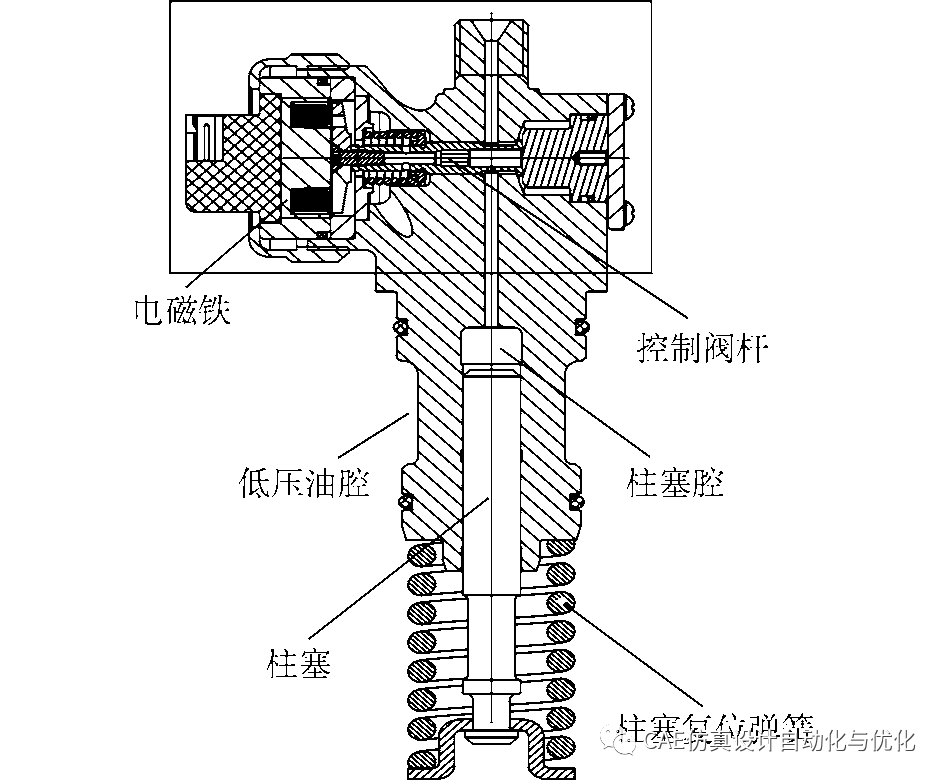
本研究共有5 個輸入變量,電控單體泵在典型工況下進行仿真,將開啟、關(guān)閉延遲時間作為輸出變量,并將開啟、關(guān)閉延遲時間最小作為最終優(yōu)化目標。
2986 1
技術(shù)哥 ??? 3年前
6_APDL基礎(chǔ)及仿真理論-多工況下的拓撲優(yōu)化 
多工況下的拓撲優(yōu)化 !學習重點: !1、 何為拓撲優(yōu)化 !區(qū)分尺寸優(yōu)化、形狀優(yōu)化、拓撲優(yōu)化。拓撲優(yōu)化是形狀優(yōu)化的一種特殊形式。網(wǎng)上資料和ansys help文件都有詳細說明。 !2、單一工況載荷下的拓撲優(yōu)化。單一工況拓撲操作流程很簡單,APDL命令也很簡單。Workbench也可以輕松實現(xiàn)。 !3、多工況下的拓撲優(yōu)化。
2976 1 2
白巧克力學仿真 ??? 4年前
多工況下發(fā)動機振動噪聲研究 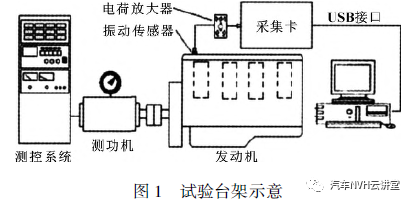
懸置系統(tǒng)優(yōu)化約束設(shè)計在已設(shè)計完成懸置基礎(chǔ)上,可以根據(jù)發(fā)動機的振動進一步優(yōu)化參數(shù),讓傳到車內(nèi)的發(fā)動機激勵最小。通常,會通過優(yōu)化系統(tǒng)約束條件來達到隔振的效果。實驗結(jié)果表明發(fā)動機在780 r /min 時產(chǎn)生了共振,故在設(shè)計懸置系統(tǒng)模態(tài)目標時考慮了轉(zhuǎn)頻13 Hz,避免產(chǎn)生共振。懸置系統(tǒng)固有模態(tài)目標如表5 所示。4.
2609 1
聲學工程師小吳 ??? 2年前
hypermesh多目標優(yōu)化要注意那些問題?
hypermesh多目標優(yōu)化要注意那些問題?
2749 5 1
lz1234 ??? 1年前
Isight集成ADAMS/CAR進行多工況聯(lián)合參數(shù)優(yōu)化實例 
額外,轉(zhuǎn)向特性特性一般耦合前束角變化特性,因此需要多工況耦合尋解。借此幾乎,將“Isight集成ADAMS/CAR進行多工況聯(lián)合參數(shù)DOE或opti”以實例的形式呈現(xiàn)。希望對有需要的朋友,有所幫助。1、 選取DOE參數(shù)試驗的Objective選取參數(shù)過程,需要跟工程實際結(jié)合。這里僅以最大轉(zhuǎn)向角、最大前束角作為Objective。
2323 1
歡樂多??π ??? 9月前
基于SFE全參數(shù)化副車架多學科優(yōu)化設(shè)計 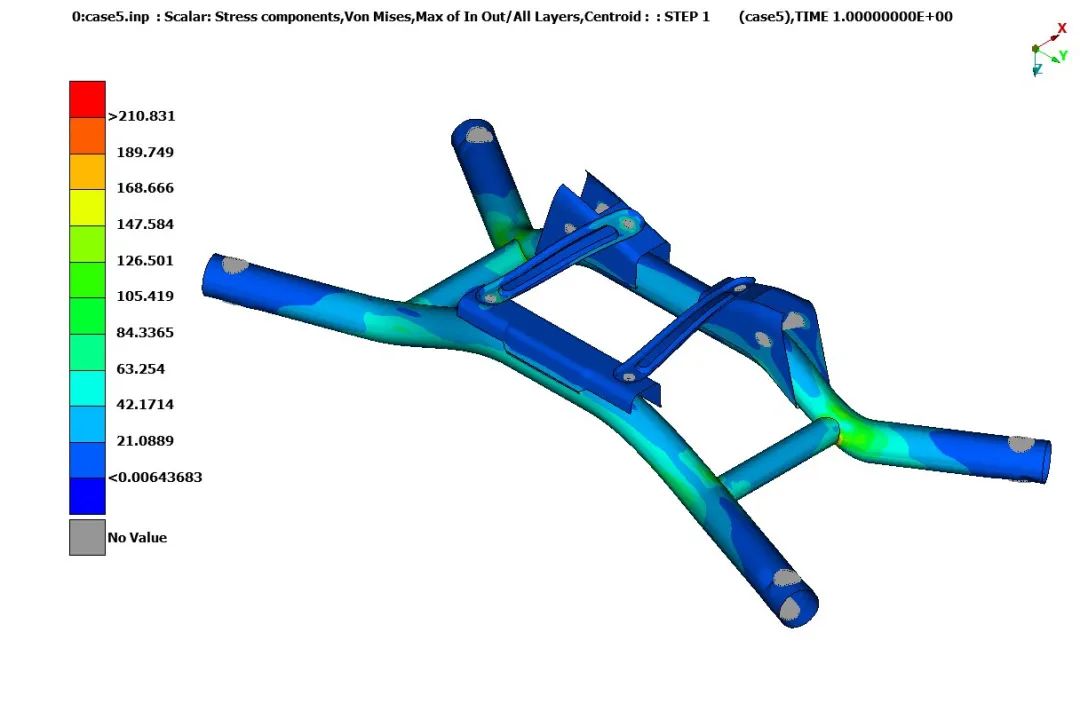
3.1 強度分析 強度分析采用慣性釋放法,考察工況根據(jù)公司內(nèi)部規(guī)范進行,一般包括常規(guī)工況和極限工況。首先進行初始性能分析,然后根據(jù)受力狀態(tài)和分析結(jié)果進行篩選用于多學科優(yōu)化分析中的分析工況(當然不進行工況篩選包絡(luò),用全部工況用于多學科優(yōu)化亦可以)。本例中為工況5、8用于多學科優(yōu)化分析。3.2 模態(tài)分析 副車架采用自由模態(tài)分析,校核第一階模態(tài)。
3735 4 2
仿真客 ??? 3年前
平板受多工況扭轉(zhuǎn)載荷拓撲優(yōu)化(文獻復現(xiàn)) 
本課適合哪些人學習:1、Optistruct拓撲優(yōu)化設(shè)計人員2、理工科學長和老師3、仿真工程師4、結(jié)構(gòu)創(chuàng)新設(shè)計人員5、結(jié)構(gòu)優(yōu)化人員你會得到什么:1、掌握多工況目標函數(shù)的創(chuàng)建2、學會拓撲優(yōu)化流程創(chuàng)建3、利用后處理,獲取拓撲優(yōu)化結(jié)果
1790
張先 ??? 3年前
基于Isight多學科優(yōu)化及輕量化優(yōu)化 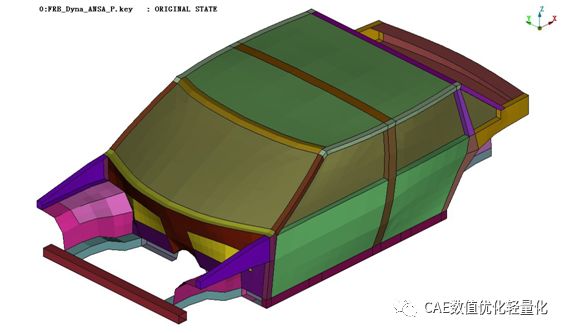
通常的分析優(yōu)化過程都是按不同學科單獨進行的,然后在驗證優(yōu)化方案對其他性能的影響。多學科優(yōu)化可以同時考察各項性能,并可以將整車質(zhì)量作為設(shè)計目標,在滿足各項性能的基礎(chǔ)上進行最優(yōu)化輕量化設(shè)計。關(guān)于整車多學科優(yōu)化有不同的優(yōu)化策略,這涉及到軟硬件資源、性能要求、項目開發(fā)周期等等各方面的影響。
3947 20 9
仿真客 ??? 3年前
一文了解基于Motor-CAD的電機快速多學科設(shè)計與優(yōu)化 
效率和損耗map圖 峰值轉(zhuǎn)矩/轉(zhuǎn)速曲線 連續(xù)轉(zhuǎn)矩/轉(zhuǎn)速曲線 開路和短路試驗 DQ 電感曲線計算 多工況銅損、鐵損、永磁體渦流損耗計算03電機多學科多目標優(yōu)化設(shè)計利用Motor-CAD與optiSLang之間的接口可以方便的實現(xiàn)電機多學科、多工況、多目標優(yōu)化設(shè)計。
3648 1
Ansys中國 ??? 4年前
Comsol在能源行業(yè)仿真中的應用——基于多工況下瓦斯抽采的多物理場耦合 
瓦斯抽采過程中涉及多種工況:不同滲透率工況、不同負壓工況以及不同溫度工況。</p><p><strong>研究多工況下瓦斯抽采具有以下重要意義:</strong></p><ul><li class="ql-align-justify">優(yōu)化瓦斯抽采方案: 通過對多工況下瓦斯抽采多物理場耦合的研究,可以深入了解瓦斯抽采過程中的物理機制和耦合規(guī)律,為優(yōu)化瓦斯抽采方案提供科學依據(jù)。
2804
技術(shù)鄰公告 ??? 1年前
SerDes設(shè)計中高速傳輸線的人工智能驅(qū)動多參數(shù)多目標優(yōu)化流程(7月29日直播) 
7月29日,Ansys官方研討會『SerDes設(shè)計中高速傳輸線的人工智能驅(qū)動多參數(shù)多目標優(yōu)化流程』為您分享如何借助Ansys RaptorAI,通過人工智能技術(shù)實現(xiàn)SerDes(高速傳輸線)的多參數(shù)、多目標協(xié)同優(yōu)化,加速設(shè)計流程、提升設(shè)計質(zhì)量。
2577
技術(shù)鄰公告 ??? 9月前
基于RecurDyn的多工況下的尼龍蝸輪疲勞性能研究 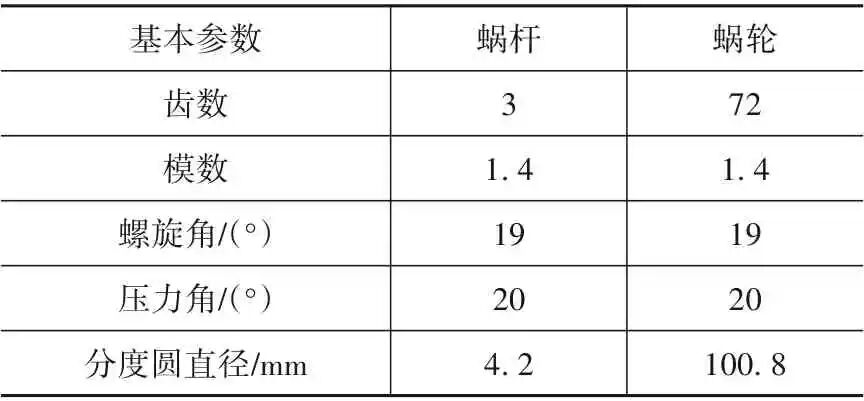
國內(nèi)外學者對蝸輪蝸桿進行了一系列研究,主要針對齒形的優(yōu)化和接觸強度的分析,而蝸輪的疲勞性能研究通常采用臺架試驗的方法[6-8],對蝸輪多工況動態(tài)加載下的疲勞壽命理論研究欠缺。
3019 1 1
仿真客 ??? 3年前
多目標優(yōu)化時量綱歸一化問題?
我有兩個目標函數(shù)分別是力均勻性和形面精度,需將這兩個目標函數(shù)轉(zhuǎn)換成一個目標函數(shù)f。在歸一化過程中,f1max,f1min,這些界限值是怎么選取的?是根據(jù)實際的需求,設(shè)定為固定值;還是說f1max f1min是要隨著迭代過程進行也進行變化?
2652 1 3
劉嫣然 ??? 3年前
ANSYS Mechanical多工況計算結(jié)果組合 附Ansys多工況組合的方法下載 
下載地址:Ansys多工況組合的方法
2916 2 2
裝腔 ??? 3年前
多特征融合的多目標跟蹤網(wǎng)絡(luò) 
以上基于聚類的無監(jiān)督方法可以獲得一定的場景泛化能力來應對光線變化,但僅使用二維圖像對復雜場景分割的精度依舊有限且難以進行場景感知,亦存在較多局限性。 針對室內(nèi)場景目標多種多樣,各目標之間差異較大,比如有靠椅、有凳子等,傳統(tǒng)圖像算法難以完整的分割出目標,且難以獲得類別標簽等更多的信息。
2536
駕駛哥 ??? 4年前
Isight--響應面分析+單目標或多目標優(yōu)化--操作流程 
本節(jié)課主要講解一下如何用Isight讀取已經(jīng)處理好的數(shù)據(jù)進行響應面近似模型建立以及用NLPQL 算法為例進行講解單目標優(yōu)化問題。多目標優(yōu)化問題類似處理。
143 4
東邪不邪 ??? 4年前
20條/頁 
 450
450 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
