



DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
DTAS 3D兩種建模思路可以解決以下懸架形式,麥弗遜、雙叉臂、三連桿、四連桿、五連桿、H臂等。麥弗遜前懸是經(jīng)典的前懸形式,由于麥弗遜前懸的一些弊端,在麥弗遜的基礎(chǔ)上逐步衍生出了雙叉臂前懸等。將麥弗遜前懸的結(jié)構(gòu)應(yīng)用在后懸上為三連桿后懸,俗稱筷子懸架,其結(jié)構(gòu)布置簡(jiǎn)單,成本低廉。隨著對(duì)操控的要求越來(lái)越高,在三連桿的懸架形式上逐步發(fā)展出了四連桿(拖曳式刀臂懸架)、五連桿、H臂等懸架。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
Adams&Workbench&Matlab四連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析 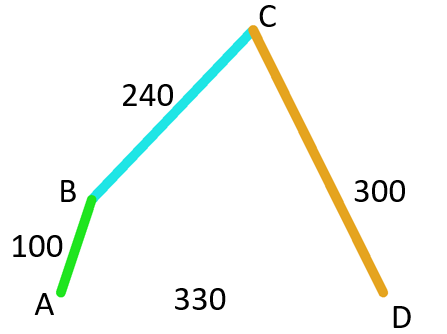
圖1為四連桿機(jī)構(gòu)的基本尺寸長(zhǎng)度,其中曲柄長(zhǎng)度為100mm,連桿的長(zhǎng)度為240mm,搖桿的長(zhǎng)度為300mm。
2809
擺渡人張 ??? 2年前
Matlab機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)仿真:包含三桿滑塊機(jī)構(gòu)\四桿\六桿 

詳細(xì)介紹了三桿滑塊機(jī)構(gòu)和四桿機(jī)構(gòu)運(yùn)動(dòng)方程的推導(dǎo)及matlab對(duì)上述機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)仿真,并實(shí)現(xiàn)機(jī)械連桿機(jī)構(gòu)運(yùn)動(dòng)動(dòng)畫的繪制,注:六桿機(jī)構(gòu)無(wú)公式推導(dǎo)文本,只有代碼。如需模型推導(dǎo)說(shuō)明文本及matlab源碼,請(qǐng)附件下載。
16
SimPC ??? 3年前
269 基于matlab的四連桿機(jī)構(gòu)動(dòng)力學(xué)參數(shù)計(jì)算 
基于matlab的四連桿機(jī)構(gòu)動(dòng)力學(xué)參數(shù)計(jì)算。將抽油機(jī)簡(jiǎn)化為4連桿機(jī)構(gòu),仿真出懸點(diǎn)的位移、速度、加速度、扭矩因數(shù)、游梁轉(zhuǎn)角等參數(shù),并繪出圖形。程序已調(diào)通,可直接運(yùn)行。
2210 1
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
Abaqus中發(fā)動(dòng)機(jī)曲柄連桿機(jī)構(gòu)動(dòng)力學(xué)模擬 
講解了發(fā)動(dòng)機(jī)曲柄連桿機(jī)構(gòu)(缸體+活塞+連桿+曲軸)動(dòng)力學(xué)模擬的建模流程及方法,曲軸轉(zhuǎn)動(dòng)720度,各活塞往復(fù)運(yùn)動(dòng)兩次。
395 3
楊紅波 ??? 2年前
ANSYS-WorkBench教程 曲柄連桿機(jī)構(gòu)剛?cè)狁詈稀⑽佪單仐U瞬態(tài)動(dòng)力學(xué)有限元仿真 
本課程結(jié)合工程實(shí)際,使用workbench軟件對(duì)曲柄連桿機(jī)構(gòu)與蝸輪蝸桿的工作過(guò)程進(jìn)行仿真,課程包含:曲柄連桿機(jī)構(gòu)及曲柄滑塊(除運(yùn)動(dòng)副的設(shè)置外、還設(shè)置了摩擦副)。運(yùn)用瞬態(tài)分析模塊,介紹了分析子步與計(jì)算收斂性的設(shè)置。詳細(xì)展示瞬態(tài)分析的建模流程與參數(shù)設(shè)置的過(guò)程,并配有詳盡的仿真案例。
452 3
伍欣然 ??? 5年前
210基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運(yùn)動(dòng)代碼 
基于matlab的仿真機(jī)械四連桿機(jī)構(gòu)運(yùn)動(dòng)代碼,包括運(yùn)動(dòng)仿真和變量變化分析圖的生成,包括角速度、速度、加速度等曲線。程序已調(diào)通,可直接運(yùn)行。
2296
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
ANSYS Workbench曲柄連桿齒輪機(jī)構(gòu)剛體動(dòng)力學(xué)分析 
該項(xiàng)目是關(guān)于使用 ANSYS Workbench(機(jī)械)對(duì)連桿曲柄滑動(dòng)機(jī)構(gòu)進(jìn)行 RBD 分析。 ANSYS Mechanical 仿真文件供下載文件file.wbpz
2201
仿真資料吧 ??? 1年前
三自由度機(jī)械臂運(yùn)動(dòng)學(xué)分析+仿真 
建立坐標(biāo)系 1正運(yùn)動(dòng)學(xué)分析 采用標(biāo)準(zhǔn)的D-h法進(jìn)行機(jī)械腿模型分析: 將連桿坐標(biāo)系的原點(diǎn)建立在連桿的關(guān)節(jié)連桿末端。 一、建立D-H連桿坐標(biāo)系的原則 1.Z,軸沿關(guān)節(jié)軸i+1的軸向。 2.原點(diǎn)O為Zi.,與Zi軸的交點(diǎn)或其公垂線與關(guān)節(jié)軸Zi的交點(diǎn)。3.Xi軸沿Zi與Zi軸的公垂線方向,由關(guān)節(jié)軸i指向關(guān)節(jié)軸i+1。
3991
余俊煒 ??? 2年前
常見(jiàn)的幾種90°翻轉(zhuǎn)機(jī)構(gòu) 
首先,還是來(lái)看一下要分析的有哪些機(jī)構(gòu): 1、齒輪齒條式±90°翻轉(zhuǎn)機(jī)構(gòu); 2、連桿式±90°翻轉(zhuǎn)機(jī)構(gòu)-1; 3、連桿式±90°翻轉(zhuǎn)機(jī)構(gòu)-2; 4、連桿式±90°翻轉(zhuǎn)機(jī)構(gòu)-3; 5、四方向90°翻轉(zhuǎn)機(jī)構(gòu)-1。
4792 2 1
工廠物流自動(dòng)化 ??? 4年前
ANSYS workbench 四連桿運(yùn)動(dòng)學(xué)分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對(duì)有限元分析感興趣的工程師你會(huì)得到什么:1、學(xué)習(xí)四連桿機(jī)構(gòu)的三維模型處理2、學(xué)習(xí)四連桿機(jī)構(gòu)接觸相關(guān)的接觸設(shè)置3、學(xué)習(xí)多體動(dòng)力學(xué)分析步的建立4、學(xué)習(xí)四連桿機(jī)構(gòu)多體動(dòng)力學(xué)分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
2311
天空紀(jì)年xh ??? 1年前
五自由度機(jī)械臂運(yùn)動(dòng)學(xué)分析(三轉(zhuǎn)動(dòng)+兩移動(dòng)自由度) 
, a*sin(theta); 0, sin(alpha), cos(alpha), d; 0, 0, 0, 1 ];end 3機(jī)器人模型建立所設(shè)計(jì)的機(jī)器人由多個(gè)連桿機(jī)構(gòu)組成
3035
余俊煒 ??? 3年前

倒扣較大,汽車模的斜頂機(jī)構(gòu)如何設(shè)計(jì) 
3)單桿類斜頂機(jī)構(gòu),汽車模用得最普片的一種,由斜頂頭、斜頂桿、導(dǎo)向套、斜頂滑腳組成,此類斜頂常用角度范圍3o-12o,角度不能超過(guò)15°,超過(guò)15°的使用雙連桿式斜頂機(jī)構(gòu)。斜頂桿常用Φ16、Φ20、Φ25,如圖所示。
2777 1 1
UG模具設(shè)計(jì)材料 ??? 4年前
【汽車知識(shí)】汽車懸掛系統(tǒng)竟然有這么多種,都是經(jīng)典的機(jī)構(gòu)設(shè)計(jì) 
7:多連桿懸掛 多連桿懸掛,就是通過(guò)各種連桿配置把車輪與車身相連的一套懸掛機(jī)構(gòu),其連桿數(shù)比普通的懸掛要多一些,一般把連桿數(shù)為三或以上的懸掛稱為多連桿懸掛。目前主流的連桿數(shù)為4或5根連桿。
2360 1
機(jī)械工程師 ??? 4年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
但在選取時(shí),通常盡量使連桿參數(shù)為0。這樣會(huì)使計(jì)算方便。坐標(biāo)系之間的變換矩陣為:可以看到,只要建立好坐標(biāo)系,找對(duì)D-H參數(shù),就很容易得到相鄰兩個(gè)坐標(biāo)系之間的轉(zhuǎn)換矩陣。只要給定了D-H參數(shù),就可以計(jì)算得出機(jī)器人手臂末端在給定坐標(biāo)系下的運(yùn)動(dòng)軌跡。給定一組關(guān)節(jié)角θi向量,就對(duì)應(yīng)末端軌跡上的一點(diǎn)。當(dāng)然這是相對(duì)于非冗余自由度機(jī)器人手臂。反之,當(dāng)給定了機(jī)器人手臂的末端軌跡,反解出關(guān)節(jié)角θi。
3010 2
擺渡人張 ??? 2年前
基于ADAMS的助老起升裝置的運(yùn)動(dòng)學(xué)仿真分析 
( 5) 基于機(jī)械原理確定核心連桿機(jī)構(gòu),如圖 1 所 示; 當(dāng) DF 驅(qū)動(dòng)連桿機(jī)構(gòu)完成起升動(dòng)作且起升板與水 平面夾角 θ 為 16°時(shí),可保證老年人站起時(shí)的平衡。1.2 建立三維模型 利用圖解法確定各桿件長(zhǎng)度,完成核心機(jī)構(gòu)的尺 寸設(shè)計(jì)。
2600 5
擺渡人張 ??? 2年前
6-pss 并聯(lián)六自由度機(jī)構(gòu)軌跡規(guī)劃 
6-pss 并聯(lián)六自由度機(jī)構(gòu)軌跡規(guī)劃 1、 建模 程序如下: % clc % clear all % function []=PSS1(XP,YP,ZP) tic %%%%%鍒濆浣嶇疆鐨勪綅濮?%%%%% % XP = 0; %鍔ㄥ鉤鍙扮浉瀵歸潤(rùn)騫沖彴鐨勫垵濮嬩綅緗潗鏍?
2066 1
余俊煒 ??? 2年前
基于精準(zhǔn)碰撞檢測(cè)算法的機(jī)械臂避障軌跡規(guī)劃 
圓柱形障礙物避障實(shí)驗(yàn)保持其他條件不變,設(shè)障礙物兩端點(diǎn)坐標(biāo)分別為 T=[2.5,2.5,2.5]T=[2.5,2.5,2.5] ; H=[?2.5,2.5,2.5]H=[?2.5,2.5,2.5]。圓柱體障礙物半徑 RC=0.7RC=0.7。
3495 6 3
機(jī)械設(shè)計(jì)師 ??? 4年前
三缸發(fā)動(dòng)機(jī)降振技術(shù)研究 
作用在活塞上的氣爆壓力是其主要作用形式,傳遞路徑為活塞-連桿等機(jī)構(gòu)-曲軸,使曲軸產(chǎn)生兩種變形:彎曲和扭轉(zhuǎn),不平衡振動(dòng)也就由此產(chǎn)生。1.4 仿真結(jié)果計(jì)算工況選取1000-5500rpm,間隔500rpm 確定為一種工況進(jìn)行計(jì)算,以四個(gè)工作循環(huán)為一個(gè)完整工期計(jì)算,上述研究表明,發(fā)動(dòng)機(jī)振動(dòng)與輻射噪聲之間的關(guān)系與車身振動(dòng)之間具有獨(dú)特的關(guān)系。
3168 1 1
聲學(xué)工程師小吳 ??? 2年前
20條/頁(yè) 
 21
21 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
