



三坐標誤差補償技術:陶瓷橫梁如何讓三坐標少修正,更精準? 
2、2角秒角穩誤差,十倍精度重構補償邏輯 Mizar Gold將陶瓷橫梁與Z軸的平面精度嚴格控制在2微米以內,角度誤差鎖定在2角秒(約0.00056°)以下。這種級別的精度意味著當測量一個1米長的零件時,2角秒的角度誤差轉化為線性偏差僅約0.5微米,遠低于傳統設備5-10微米的偏差值。這樣微小的原始誤差,軟件補償只需要輕微調整,避免了過度補償。
2382
深圳市中圖儀器股份有限公司 ??? 8月前
氣體質量流量控制器是否能夠實現自動補償? 
在工業自動化、半導體制造、生物制藥、新能源研發等高精尖領域,對氣體流量的精確控制十分重要,而氣體質量流量控制器(Mass Flow Controller, MFC)作為核心控制元件,性能直接關系到整個工藝過程的穩定性與重復性,那么一個關鍵問題隨之而來:氣體質量流量控制器是否能夠實現自動補償?
2155
曾澤明-前端 ??? 2月前
鑄鐵裝配平臺操作指南:調平與夾緊三大核心技術
在機械裝配、汽車零部件加工等領域,鑄鐵裝配平臺是保障作業精度的核心基準裝備,而調平、科學夾緊及誤差控制是其操作的三大核心技術。多數裝配誤差源于操作不規范 
</div><div contenteditable="false" width="100%"> 三、誤差控制技術:規避操作型精度偏差 </div><div contenteditable="false" width="100%"> 細節把控是減少誤差的關鍵,核心關注三點: </div><div contenteditable="false" width="100%"> 1.環境適配
2574
河北威岳 ??? 4月前
數控測量|一文讀懂中圖儀器在機檢測與機床校準補償系統 
在制造業領域,為了確保產品質量和工藝精確度,在機檢測與機床校準補償系統被廣泛應用于機床領域。 原理解析 在機檢測與機床校準補償系統由精密測量儀器、信息處理設備和控制系統組成。 機床校準補償基于有限元分析和反饋控制理論。對機床進行檢測和測量,從而獲取機床在工作過程中的誤差和變形信息。然后通過與預設標準進行比較和分析,計算出校準補償量。
2184
深圳市中圖儀器股份有限公司 ??? 2年前
高壓比例閥的控制回路應如何設計? 
高壓比例閥(通常指工作壓力超過100 bar,甚至高達400 bar以上的應用場景)與普通低壓閥有著本質區別,在高壓環境下,流體的可壓縮性變化、液動力(Flow Force)的劇烈波動以及密封件的摩擦非線性,都會對控制回路提出嚴苛要求,若沿用低壓系統的簡單PID控制策略,極易導致系統振蕩、響應滯后或穩態誤差過大,因此設計之初必須充分評估壓力等級、介質特性及動態響應需求。
1744
埃邁諾冠氣動器材(上海)有限公司 ??? 2月前
集成式電子液壓制動系統的復合制動協調控制 
對制動力切換的過渡工況問題,Numasato等對液壓制動系統與電機的響應特性進行校正,解決兩者響應特性上的差異,但同時導致了系統整體的響應滯后.TERUO通過搭建濾波器,讓電機額外響應制動力需求的高頻信號,但由于高頻信號所占原信號的比例不大,導致該策略控制效果不理想.朱智婷等提出了一種包含制動力分配修正和電機力補償模塊的協調控制策略,制動減速度跟蹤誤差明顯減小,但該策略僅停留在仿真階段.清華大學呂辰基于所開發的具有協調式能量回饋功能的制動防抱死系統
2463 1
機械設計師 ??? 4年前
均勻性以及波前誤差 
為了將相位轉換成波前誤差,我們將其除以360°。 圖1.計算非均勻前表面膜層(上)和后表面膜層(下)所需的相移。 一般來說,較薄的干涉膜層會增加反射相移。對于前表面反射鏡,添加補償入射介質材料會減少相移,與膜層變化相反。如圖2所示,從純幾何的角度來看,這種補償行為實際上減少了波前誤差。
2092
張藝凡 ??? 2年前
[Macleod] 均勻性以及波前誤差 ![[Macleod] 均勻性以及波前誤差](https://img.jishulink.com/202512/attachment/9ea5c43932b84b43b4b9546c7495e766.png?image_process=resize,fw_294,fh_172,)
為了將相位轉換成波前誤差,我們將其除以360°。 圖1.計算非均勻前表面膜層(上)和后表面膜層(下)所需的相移。 一般來說,較薄的干涉膜層會增加反射相移。對于前表面反射鏡,添加補償入射介質材料會減少相移,與膜層變化相反。如圖2所示,從純幾何的角度來看,這種補償行為實際上減少了波前誤差。
1305
信光嗎 ??? 5月前
Macleod:均勻性以及波前誤差 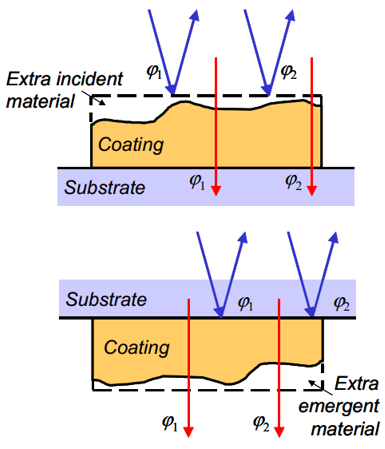
圖2.在21層四分之一堆棧中,由-1%的均勻性誤差引起的波前誤差。Theoretical Figure是純幾何誤差 不幸的是,在反射鏡中,膜層相位可能極大地過度補償幾何誤差,導致相反意義上的大尺寸誤差。這在圖3中得到說明。 圖3.由一個四分之一波長堆棧組成的擴展區域反射鏡顯示了這種設計中固有的過度補償。
3188
追光ing ??? 2年前
風干擾下傾轉旋翼飛行器直升機模態預設性能跟蹤控制 
然后,以反步法為基礎,采用神經網絡和干擾觀測器對不確定性和干擾進行前饋補償,并引入性能函數對跟蹤誤差進行約束,完成了跟蹤控制器設計。最后,利用仿真結果表明了外部干擾和不確定性能夠被準確估計,并且跟蹤誤差不會出現越界行為。因此,本文的控制方法能夠使系統狀態快速有效地跟蹤期望信號。 來源 :《無人系統技術》
2695 1
我愛飛機 ??? 2年前
神經網絡芯片的未來發展,路在何方? 
近似計算:沒人能拒絕免費的午餐標題意譯:低硬件成本的近似乘法器誤差補償技術一句話總結:作者分析了一種常用的近似乘法器設計所導致的誤差,引入了可控制變量的概念對該誤差進行補償,并給出了關于該變量的取值與補償效果間的關系的數學證明,能夠在不引入大量額外電路開銷的前提下,有效彌補近似乘法器帶來的神經網絡模型精度下降。
2962 1
平頭叔 ??? 3年前
數控機床加工精度受哪些因素的影響? 
3、在零件加工過程中做誤差補償。 方式①: 如果數控銑床的操作系統有反向偏差問題,就需要進行誤差補償。機床操作者在加工開始時應用數控編程對其中的某些單位進行定位,進而實現誤差補償,消除反向偏差。 方式②:數控編程既可以實現銑削加工時的準確定位,還可以在不改變數控銑床本體的情況下,實現數控銑床插補。
4262
2103707493 ??? 2年前
干貨|5個步驟詳細講解控制環路設計的解決思路 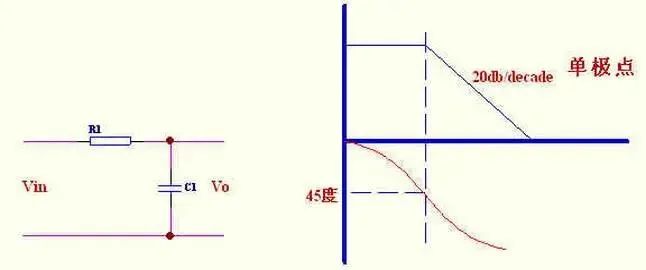
在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率。04如何設計控制環路?經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計。我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計。
2438
電子工程世界EEWorld ??? 3年前
質量流量計是否具備自動流量補償功能? 
,影響生產控制的精確性。
1462
曾澤明-前端 ??? 6月前
機床精度突然降低?4大診斷原則,5大診斷方法 
用百分表對X軸進行仔細檢查,發現機械位置實際誤差同數字顯示出來的誤差基本一致,從而認為故障原因為X軸重復定位誤差過大。對X軸的反向間隙及定位精度進行檢查,重新補償其誤差值,結果起不到任何作用。因此懷疑光柵尺及系統參數等有問題。但為什么產生如此大的誤差,卻又未出現相應的報警信息進一步檢查發現,此軸為垂直方向的軸,當X軸松開時主軸箱向下掉,造成了誤差。
2230
機械學霸 ??? 4年前
微型蝸輪減速機精密傳動回程間隙怎么減小? 
也可對蝸輪實施偏心套調整,旋轉套筒改變蝸輪中心距,將側隙控制在0.03-0.08mm,高精度要求時≤0.05mm。還可采用雙螺母預緊結構,通過調整鎖緊螺母扭矩(建議為標準扭矩的1.2-1.5倍),消除蝸桿軸向移動。 2.提高加工精度:控制蝸桿導程誤差≤0.005mm/100mm,蝸輪齒形誤差≤0.02mm,確保初始裝配間隙均勻。
2337
博揚智能 ??? 2月前
Zemax案例 | 一種低波前差變倍擴束系統的設計 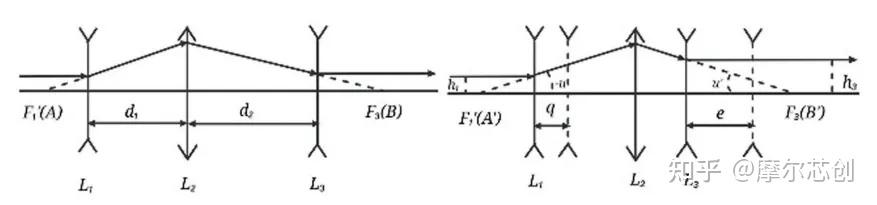
該系統采用機械補償式三組元結構,以BK7與F2玻璃雙膠合透鏡組為核心,通過Zemax軟件仿真優化,實現了2~6.4×的連續變倍擴束,系統總長控制在250mm內,光程差僅0.1波長左右,各項性能指標達到行業先進水平,為激光技術高精度應用提供了全新解決方案。
2334
摩爾芯創 ??? 4月前
Zemax案例 | 基于Zemax相機多自由度主動對準技術研究 
該方法流程繁瑣、耗時較長,無法實時補償裝配誤差,面對高像素、大視場、復雜結構的現代相機模組,誤差累積效應被急劇放大,難以滿足高端成像需求。(2)現有主動對準:設備依賴與復雜度居高不下主動對準(AA)通過實時監測光學特性、動態調整組件位姿實現精度補償,是行業主流升級方向。
978
摩爾芯創 ??? 15天前
Amesim控制模塊之PID控制 
PID控制器就是根據系統的誤差,利用比例、積分、微分計算出控制量進行控制的。比例P控制比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關系。當僅有比例控制時系統輸出存在穩態誤差。積分I控制在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關系。對一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個控制系統是有穩態誤差的或簡稱有差系統。
3253 1
技術哥 ??? 3年前
閥門、自動化儀表、DCS控制系統專業術語 
5.補償器 compensator,補償元件compensation element為抵消由于規定工作條件變化所造成的誤差源而設計的裝置。6.計(表) meter, gauge測量和指示被測值的裝置。注:計(表)只能加修飾語使用,如:流量計、壓力表。7.指示儀 indicator提供被測變量直觀示值的裝置。
2446
閥門圈 ??? 3年前
20條/頁 
 88
88 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
