



六軸機(jī)械臂(帶抓手)運(yùn)動(dòng)學(xué)分析+軌跡規(guī)劃 
驗(yàn)證了正運(yùn)動(dòng)學(xué)方程的正確性。
5217 1
余俊煒 ??? 2年前
【有趣的abaqus后處理】巧用annotation之運(yùn)動(dòng)軌跡及動(dòng)態(tài)注釋 
;當(dāng)然如果想在不同的分析步顯示不同點(diǎn),或同一個(gè)分析步顯示多個(gè)點(diǎn)的運(yùn)動(dòng)軌跡,只需<strong>多次運(yùn)行腳本</strong>即可。
3768 10 5
靜默本無緣 ??? 5年前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 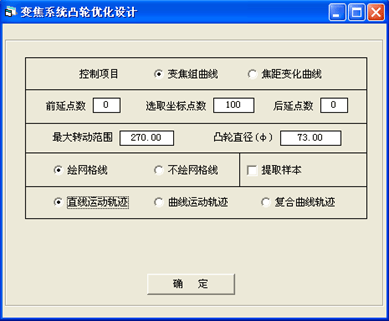
如果選擇“復(fù)合曲線軌跡”,界面上除顯示運(yùn)動(dòng)曲線方程系數(shù)的表格框外,還顯示“結(jié)合點(diǎn)位置”系數(shù),以便根據(jù)需要選擇合適直線與曲線結(jié)合點(diǎn)的位置,無論選擇以上哪種,都還可以利用拉桿條之間控制凸輪運(yùn)動(dòng)曲線或運(yùn)動(dòng)速率軌跡曲線。也可以先預(yù)設(shè)初步曲線方程系數(shù),然后通過拉桿條調(diào)整。在選擇“曲線運(yùn)動(dòng)軌跡”后,按“確定”鍵出現(xiàn)圖3界面。
1863
信光嗎 ??? 3月前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 
如果選擇“復(fù)合曲線軌跡”,界面上除顯示運(yùn)動(dòng)曲線方程系數(shù)的表格框外,還顯示“結(jié)合點(diǎn)位置”系數(shù),以便根據(jù)需要選擇合適直線與曲線結(jié)合點(diǎn)的位置,無論選擇以上哪種,都還可以利用拉桿條之間控制凸輪運(yùn)動(dòng)曲線或運(yùn)動(dòng)速率軌跡曲線。也可以先預(yù)設(shè)初步曲線方程系數(shù),然后通過拉桿條調(diào)整。在選擇“曲線運(yùn)動(dòng)軌跡”后,按“確定”鍵出現(xiàn)圖3界面。
1183
追光ing ??? 3月前
OCAD應(yīng)用:凸輪曲線的優(yōu)化設(shè)計(jì) 
如果選擇“復(fù)合曲線軌跡”,界面上除顯示運(yùn)動(dòng)曲線方程系數(shù)的表格框外,還顯示“結(jié)合點(diǎn)位置”系數(shù),以便根據(jù)需要選擇合適直線與曲線結(jié)合點(diǎn)的位置,無論選擇以上哪種,都還可以利用拉桿條之間控制凸輪運(yùn)動(dòng)曲線或運(yùn)動(dòng)速率軌跡曲線。也可以先預(yù)設(shè)初步曲線方程系數(shù),然后通過拉桿條調(diào)整。在選擇“曲線運(yùn)動(dòng)軌跡”后,按“確定”鍵出現(xiàn)圖3界面。
1986
追光ing ??? 12月前
大型混流式水輪機(jī)轉(zhuǎn)輪用鑄鋼件夾雜缺陷預(yù)測(cè)與工藝優(yōu)化 
圖10是下環(huán)鑄鋼件工藝優(yōu)化后的夾雜結(jié)果驗(yàn)證,圖10a)中的實(shí)際鑄件明顯不存在夾雜缺陷;而圖 10b)中的夾雜運(yùn)動(dòng)軌跡顯示雜最后大部分集中于冒口區(qū)域中,鑄件中基本沒有夾雜缺陷,與實(shí)際結(jié)果合。 4結(jié)論以水輪機(jī)轉(zhuǎn)輪用下環(huán)鑄鋼件為對(duì)象分析了其主要鑄造缺陷為夾雜。
4282 1
雙螺桿泵 ??? 2年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
axes=gca;axes.CameraViewAngleMode='manual';axes.CameraViewAngle=7.5;gf=gcf;gf.Position=[400,300,720,420];saveas(gf,'B樣條末端運(yùn)動(dòng)軌跡','svg')figure('Color',[1,1,1],'Position',[485,180,536,325]);
2121
余俊煒 ??? 3年前
用Abaqus復(fù)現(xiàn)最強(qiáng)大腦的腦王決賽項(xiàng)目《傅立葉殘影》 
可見效果還是很不錯(cuò)的,和節(jié)目給出的軌跡圖是一致的。 另外,我們還可以在代碼上加上一點(diǎn),使得可以顯示結(jié)點(diǎn)在軌跡上游走的過程。
2263
涼魚pro max ??? 2年前
渦旋壓縮機(jī)的虛擬建模與運(yùn)動(dòng)仿真
文獻(xiàn)[6]指出,動(dòng)渦旋盤的絕對(duì)運(yùn)動(dòng)就是十字滑環(huán)相對(duì)于支架體的牽連運(yùn)動(dòng)和動(dòng)渦盤相對(duì)于十字滑環(huán)的相對(duì)運(yùn)動(dòng)的合成,其中心 b 的運(yùn)動(dòng)軌跡是以支架體中心 a 為圓心,以 r 為半徑的圓在 ADAMS 軟件中,依次取動(dòng)渦旋盤和曲軸上任意一點(diǎn),即可得到動(dòng)渦旋盤的運(yùn)動(dòng)軌跡。如圖 12 所示,動(dòng)渦旋盤運(yùn)動(dòng)軌跡是以曲軸偏心距 r為半徑的圓。從而驗(yàn)證了動(dòng)渦旋盤公轉(zhuǎn)平動(dòng)的規(guī)律。為動(dòng)渦盤運(yùn)動(dòng)規(guī)律。
2662
我愛汽輪機(jī)仿真 ??? 2年前
電場(chǎng)可以控制中性粒子的運(yùn)動(dòng)嗎? 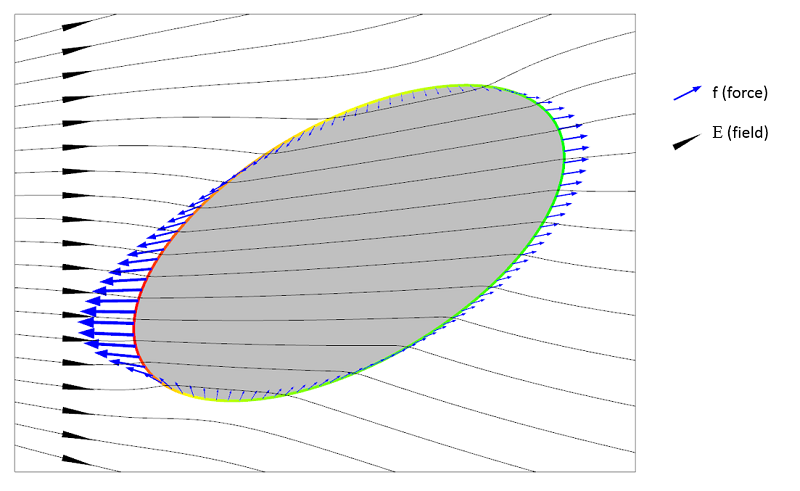
流體流動(dòng)顆粒追蹤(粒子追蹤模塊),用于計(jì)算紅細(xì)胞和血小板在阻力和介電泳力的影響下以及布朗運(yùn)動(dòng)下的軌跡。 底層模型中使用了三個(gè)研究: 研究 1 求解了頻率為 100kHz 的穩(wěn)態(tài)流體動(dòng)力學(xué)和頻域(AC)電勢(shì)。 研究 2 使用瞬態(tài)研究步驟,該步驟利用研究 1 中的解并在沒有介電泳力的情況下計(jì)算粒子軌跡。
2687 6 1
我是小能 ??? 3年前
OCAD應(yīng)用:凸輪曲線優(yōu)化設(shè)計(jì) 
其中凸輪運(yùn)動(dòng)曲線直接顯示了系統(tǒng)變焦組和補(bǔ)償組的運(yùn)動(dòng)曲線形狀,還可從圖上讀出曲線各點(diǎn)的坐標(biāo)值;凸輪升角曲線是根據(jù)設(shè)計(jì)出的凸輪運(yùn)動(dòng)曲線計(jì)算出的曲線上各點(diǎn)的斜率只值,從中分析凸輪曲線運(yùn)動(dòng)陡度,陡度過大就容易造成運(yùn)動(dòng)的卡滯,影響使用效果;焦距變化曲線顯示了系統(tǒng)焦距隨凸輪轉(zhuǎn)動(dòng)的變化關(guān)系,因?yàn)橛行?duì)系統(tǒng)焦距變化要求嚴(yán)格控制幷需要便于讀取的系統(tǒng),就必須在凸輪設(shè)計(jì)時(shí)控制焦距變化曲線。
2268
畫屏 ??? 1年前
OCAD應(yīng)用:凸輪曲線優(yōu)化設(shè)計(jì) 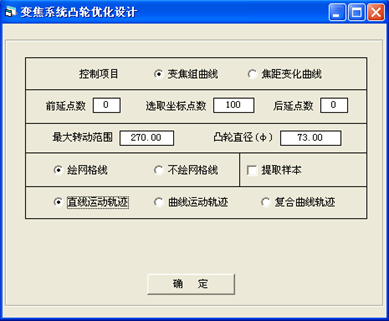
其中凸輪運(yùn)動(dòng)曲線直接顯示了系統(tǒng)變焦組和補(bǔ)償組的運(yùn)動(dòng)曲線形狀,還可從圖上讀出曲線各點(diǎn)的坐標(biāo)值;凸輪升角曲線是根據(jù)設(shè)計(jì)出的凸輪運(yùn)動(dòng)曲線計(jì)算出的曲線上各點(diǎn)的斜率只值,從中分析凸輪曲線運(yùn)動(dòng)陡度,陡度過大就容易造成運(yùn)動(dòng)的卡滯,影響使用效果;焦距變化曲線顯示了系統(tǒng)焦距隨凸輪轉(zhuǎn)動(dòng)的變化關(guān)系,因?yàn)橛行?duì)系統(tǒng)焦距變化要求嚴(yán)格控制幷需要便于讀取的系統(tǒng),就必須在凸輪設(shè)計(jì)時(shí)控制焦距變化曲線。
1722
信光嗎 ??? 2月前
一種基于目標(biāo)的可解釋的自動(dòng)駕駛預(yù)測(cè)和規(guī)劃策略 
如何定義可解釋的駕駛行為 在某種程度上,預(yù)測(cè)需要圍繞在高階自動(dòng)駕駛系統(tǒng)中觀察到的軌跡是否具備可解釋性而構(gòu)建的,目標(biāo)識(shí)別過程有助于直觀解釋其軌跡預(yù)測(cè)的合理性,從而有助于進(jìn)行系統(tǒng)分析和調(diào)試。這樣將朝著使我們的自動(dòng)駕駛系統(tǒng)將向更值得信賴的方向發(fā)展,也是證明系統(tǒng)決策的能力的關(guān)鍵。自車以藍(lán)色顯示,條形圖顯示非自車的目標(biāo)概率。
4346 7 2
駕駛哥 ??? 2年前
用 Mathematica 中的阿基米德螺線和復(fù)雜代數(shù)分析太空中雜耍的模式 
更有趣的是觀察旋轉(zhuǎn)坐標(biāo)系中的軌跡。上面的右圖顯示了雜耍者在旋轉(zhuǎn)框架中看到的東西。您注意到這些球是如何以弧線運(yùn)動(dòng)的嗎? 要在旋轉(zhuǎn)坐標(biāo)系中生成繪圖,如上圖右側(cè)所示,只需將線函數(shù) TL 乘以一個(gè)以相同角速度向相反方向旋轉(zhuǎn)的指數(shù)函數(shù)。
2041
墨光科技 ??? 2年前
OCAD應(yīng)用:凸輪曲線優(yōu)化設(shè)計(jì) 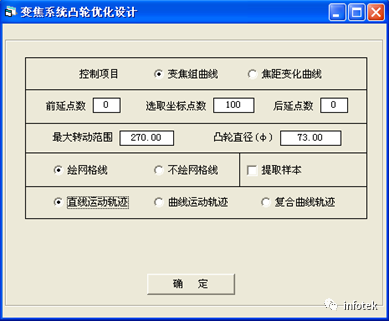
其中凸輪運(yùn)動(dòng)曲線直接顯示了系統(tǒng)變焦組和補(bǔ)償組的運(yùn)動(dòng)曲線形狀,還可從圖上讀出曲線各點(diǎn)的坐標(biāo)值;凸輪升角曲線是根據(jù)設(shè)計(jì)出的凸輪運(yùn)動(dòng)曲線計(jì)算出的曲線上各點(diǎn)的斜率只值,從中分析凸輪曲線運(yùn)動(dòng)陡度,陡度過大就容易造成運(yùn)動(dòng)的卡滯,影響使用效果;焦距變化曲線顯示了系統(tǒng)焦距隨凸輪轉(zhuǎn)動(dòng)的變化關(guān)系,因?yàn)橛行?duì)系統(tǒng)焦距變化要求嚴(yán)格控制幷需要便于讀取的系統(tǒng),就必須在凸輪設(shè)計(jì)時(shí)控制焦距變化曲線。
1740
追光ing ??? 1年前
OCAD應(yīng)用:凸輪曲線優(yōu)化設(shè)計(jì)
其中凸輪運(yùn)動(dòng)曲線直接顯示了系統(tǒng)變焦組和補(bǔ)償組的運(yùn)動(dòng)曲線形狀,還可從圖上讀出曲線各點(diǎn)的坐標(biāo)值;凸輪升角曲線是根據(jù)設(shè)計(jì)出的凸輪運(yùn)動(dòng)曲線計(jì)算出的曲線上各點(diǎn)的斜率只值,從中分析凸輪曲線運(yùn)動(dòng)陡度,陡度過大就容易造成運(yùn)動(dòng)的卡滯,影響使用效果;焦距變化曲線顯示了系統(tǒng)焦距隨凸輪轉(zhuǎn)動(dòng)的變化關(guān)系,因?yàn)橛行?duì)系統(tǒng)焦距變化要求嚴(yán)格控制幷需要便于讀取的系統(tǒng),就必須在凸輪設(shè)計(jì)時(shí)控制焦距變化曲線。
1759
追光ing ??? 11月前
OCAD應(yīng)用:凸輪曲線優(yōu)化設(shè)計(jì)
其中凸輪運(yùn)動(dòng)曲線直接顯示了系統(tǒng)變焦組和補(bǔ)償組的運(yùn)動(dòng)曲線形狀,還可從圖上讀出曲線各點(diǎn)的坐標(biāo)值;凸輪升角曲線是根據(jù)設(shè)計(jì)出的凸輪運(yùn)動(dòng)曲線計(jì)算出的曲線上各點(diǎn)的斜率只值,從中分析凸輪曲線運(yùn)動(dòng)陡度,陡度過大就容易造成運(yùn)動(dòng)的卡滯,影響使用效果;焦距變化曲線顯示了系統(tǒng)焦距隨凸輪轉(zhuǎn)動(dòng)的變化關(guān)系,因?yàn)橛行?duì)系統(tǒng)焦距變化要求嚴(yán)格控制幷需要便于讀取的系統(tǒng),就必須在凸輪設(shè)計(jì)時(shí)控制焦距變化曲線。
2785
追光ing ??? 10月前
模擬流體中的粒子運(yùn)動(dòng)時(shí),選擇合適的公式以提升計(jì)算效率 
例如,假設(shè)我們要在 1s 的總仿真時(shí)間內(nèi)追蹤水中直徑約 20μm 的石英玻璃顆粒的運(yùn)動(dòng)。從上述表格我們可知,水中這樣的小粒子的拉格朗日響應(yīng)時(shí)間約為 5×10^-5 s,所以總仿真時(shí)間約為 2000τ_p。如果我們想在幾分鐘或幾小時(shí)的跨度內(nèi)追蹤更小的粒子,那么我們的總仿真時(shí)間可能比 τp 大幾百萬倍。 下面的截圖顯示了瞬態(tài)求解器在跟蹤這些 20μm 粒子時(shí)所采取的時(shí)間步日志。
3660 7
學(xué)時(shí)習(xí) ??? 2年前
神筆馬良——Abaqus萬能熱源插件 
Abaqus2016及更早版本中漢字顯示亂碼,可切換為英文界面,將lang.txt文件中的“zh_CN = 1”更改為“zh_CN = 0”即可; 本插件采用高斯面熱源進(jìn)行熱源定義,如需其他形式的熱源,可自行修改; 延申本插件,可用于DLOAD、VDLOAD子程序,生成指定路徑的移動(dòng)載荷。有意購(gòu)買或存疑,歡迎私信咨詢。
5424 18 17
潤(rùn)杰 ??? 5年前

20條/頁(yè) 
 8
8 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
