



Ansys Zemax | 探究 OpticStudio 偏振分析功能 
也就是說,用戶可以有選擇地獨立跟蹤普通光束或異常光束,或者跟蹤一個同時考慮由于另一個引起的相位旋轉(zhuǎn)。這是由模式標(biāo)志控制的,它允許用戶在如何根據(jù)給定系統(tǒng)的普通光束和非常光束之間的角度偏差對雙折射效應(yīng)進(jìn)行建模方面具有更大的靈活性。 雙折射輸入/輸出表面在模擬雙折射方面的唯一局限是它們不考慮光線分裂的影響。為了考慮光線分裂,系統(tǒng)應(yīng)該轉(zhuǎn)換為非序列模式。
2588 4
宇熠科技 ??? 2年前
探究 Zemax OpticStudio偏振分析功能 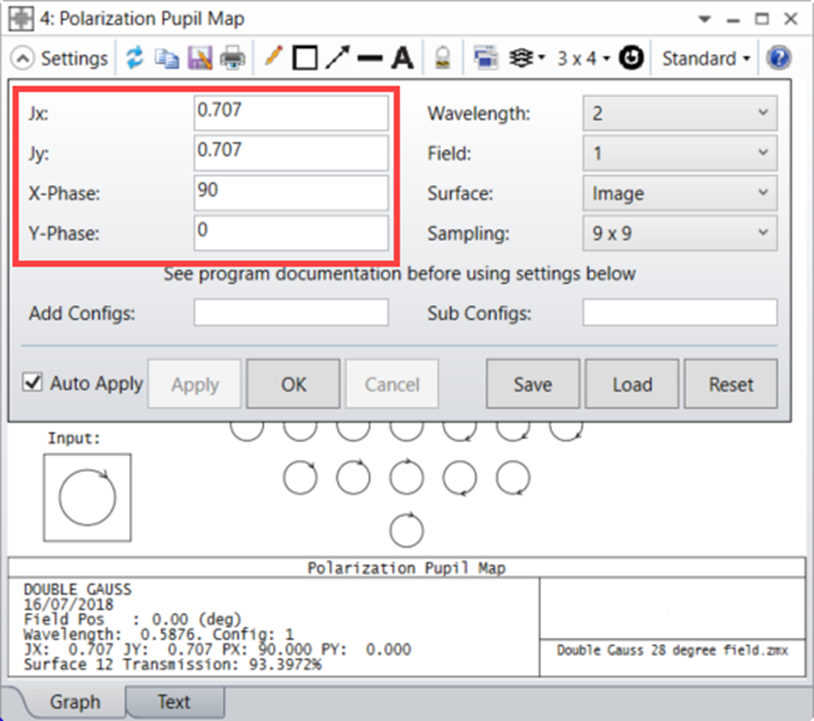
也就是說,用戶可以有選擇地獨立跟蹤普通光束或異常光束,或者跟蹤一個同時考慮由于另一個引起的相位旋轉(zhuǎn)。這是由模式標(biāo)志控制的,它允許用戶在如何根據(jù)給定系統(tǒng)的普通光束和非常光束之間的角度偏差對雙折射效應(yīng)進(jìn)行建模方面具有更大的靈活性。有關(guān)模式標(biāo)志用途的更多信息,請參見“在“雙折射輸入”表面上選擇模式標(biāo)志有什么作用?。
2465
Ansys中國 ??? 3年前
從原理到應(yīng)用教你了解毫米波雷達(dá) 
圖1 FMCW雷達(dá)框圖[1] 混頻器是一個 電子組件能夠?qū)蓚€信號合并在一 起并生成新的頻率的信號,生成的新頻率等于兩個輸入正弦信號頻率差,相位差等于兩個輸入信號的相位差。 圖2所示為毫米波雷達(dá)經(jīng)過以上流程后檢測單個物體獲取的IF信號。
4543 1
無人機(jī)圈 ??? 2年前
激光跟蹤儀基本工作原理及應(yīng)用 
具體來說,對于目標(biāo)的位置測量,主要有基于相位差的激光干涉(IF)測量方法和基于雙頻調(diào)制信號的絕對距離(AD)測量方法。為確保位置測量精度,需要明確兩種測量方法的切換條件和操作模式,其測量精度可達(dá) 6μm/m。 二、結(jié)構(gòu)特點 通過使用標(biāo)準(zhǔn)球反射鏡與萬向節(jié)式回轉(zhuǎn)軸系,可以減小系統(tǒng)誤差對測量精度的影響。
2837
深圳市中圖儀器股份有限公司 ??? 1年前
HFSS仿真寶典 | 陣列天線的波束掃描 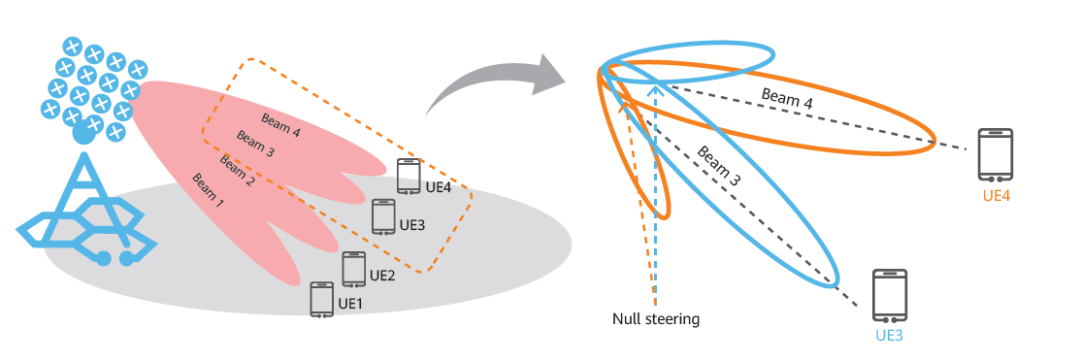
在雷達(dá)、通信和導(dǎo)航等領(lǐng)域,可以實現(xiàn)更高的信號質(zhì)量和更好的目標(biāo)跟蹤效果。在波束掃描中,陣列天線的每個天線單元可以被視為一個發(fā)射機(jī)或接收機(jī),并且可以通過改變它們之間的相位差和振幅來實現(xiàn)對發(fā)射波束的控制。波束掃描技術(shù)可以根據(jù)需要對天線單元進(jìn)行編程,從而實現(xiàn)不同的波束方向和形狀。
2529
萬有引力LYQ ??? 2年前
衛(wèi)星測控系統(tǒng)簡介 
(2)提供地面站跟蹤的信號源,地面衛(wèi)星測控中心通過測量發(fā)射信號和接收信號之 間的相位差,確定地面站與衛(wèi)星之間的距離以及兩者的相對運動速度。 (3)接收地面測控中心根據(jù)遙測和跟蹤數(shù)據(jù)發(fā)現(xiàn)星上分系統(tǒng)參數(shù)出現(xiàn)偏差或故障發(fā) 送的指令,進(jìn)而調(diào)整衛(wèi)星的在軌運行姿態(tài)與運行軌跡。
5455 1
航模無人機(jī)干貨分享 ??? 2年前
HFSS仿真寶典 | 陣列天線的波束掃描
在雷達(dá)、通信和導(dǎo)航等領(lǐng)域,可以實現(xiàn)更高的信號質(zhì)量和更好的目標(biāo)跟蹤效果。在波束掃描中,陣列天線的每個天線單元可以被視為一個發(fā)射機(jī)或接收機(jī),并且可以通過改變它們之間的相位差和振幅來實現(xiàn)對發(fā)射波束的控制。波束掃描技術(shù)可以根據(jù)需要對天線單元進(jìn)行編程,從而實現(xiàn)不同的波束方向和形狀。
2881 2 1
仿真客 ??? 2年前
知語云:低慢小無人機(jī)管制反制監(jiān)測 探測偵測方式方法? 
激光測距根據(jù)測量原理,可以在分為脈沖式和相位式。脈沖式激光測距是利用激光脈沖在系統(tǒng)和目標(biāo)之間來回傳輸一次所使用的時間計算出目標(biāo)的距離。相位式的激光測距是利用調(diào)制的連續(xù)光波在探測系統(tǒng)和目標(biāo)之間來回一次所發(fā)生的相移計算出目標(biāo)的距離。2004年之中,李大社等等人通過計算,驗證了功率10MW,重頻在10pps的激光器在激光探測器的引導(dǎo)下可以跟蹤較大的無人機(jī)中。
4640 8 2
用戶_34138 ??? 2年前
漢航Hunter Pad--基于Linux操作系統(tǒng)的健康狀態(tài)監(jiān)測與故障診斷PHM有力工具 
沖擊測試:計算用戶定義頻帶內(nèi)的頻率響應(yīng)函數(shù)、相干性、自功率譜及相位譜。 實時分析:數(shù)學(xué)運算、積分、微分、FFT、平均、加窗、自功率/互功率譜、FRF函數(shù)、相干、實時濾波器、均方根、倍頻程、階次跟蹤、掃頻正弦波、閾值報警/中止等,具有重采樣、截取、刪除、合并功能,可根據(jù)自定義模板自動生成實驗報告,具有活動圖功能。
2262
漢航 ??? 5月前
泰伯效應(yīng) 
圓錐相位掩模版的泰伯成像 在VirtualLab Fusion中對帶有一層圓錐體的相位掩模板進(jìn)行了嚴(yán)格的建模。檢測到不同的Talbot圖像,其中柱圖案在主圖像平面中再現(xiàn),而孔圖案在次圖像平面中再現(xiàn)。
2284
張藝凡 ??? 2年前
基于CST相控陣天線快速設(shè)計方法 
相控陣?yán)走_(dá)成為近幾年快速發(fā)展的一種新型雷達(dá),主要的優(yōu)點在于其搜索跟蹤目標(biāo)時,陣列天線是固定的,只要改變天線陣元間的相位差,即可達(dá)到使天線方向圖進(jìn)行無慣性掃描的目的,避免了使陣列天線做機(jī)械轉(zhuǎn)動時的一系列問題。并且通過改變天線陣元饋電幅度的 大小,也可以使天線陣方向圖的形狀進(jìn)行一定的改變,以便應(yīng)對不同的需求。目前,相控陣?yán)走_(dá)已經(jīng)成為一個具有多目標(biāo)搜索跟蹤、高自適應(yīng)能力的先進(jìn)檢測系統(tǒng)。
2564
320科技工作室 ??? 3年前
如何設(shè)置PCB跡線角度?最好是45度還是圓弧?90度直角接線可以嗎? 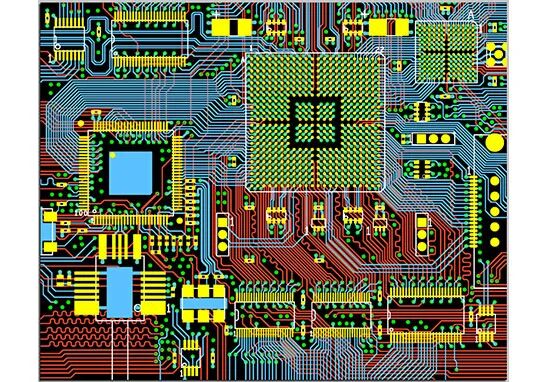
90°角處的阻抗不連續(xù)性和外部的寄生電容將導(dǎo)致高頻信號的相位和振幅誤差、輸入和輸出之間的失配,以及可能存在的寄生耦合,從而導(dǎo)致電路性能惡化,影響PCB電路信號的傳輸特性。 關(guān)于90°信號布線,我們的觀點是盡可能避免90°布線。
2545
電子設(shè)計聯(lián)盟 ??? 3年前
衛(wèi)星測控科普之無線電測控技術(shù)概述 
將地面發(fā)來的穩(wěn)定頻率信號(載波信號)轉(zhuǎn)發(fā)回去,在地面獲得來回雙程多布勒頻率變化從而獲得比單程多布勒頻率變化更為精確的衛(wèi)星速度數(shù)據(jù),將地面發(fā)來的測距信號(調(diào)制在載波上)轉(zhuǎn)發(fā)回地面站,地面根據(jù)發(fā)送和接收到測距信號的相位差獲得衛(wèi)星與地面站的距離,同時應(yīng)答機(jī)本身也具備信標(biāo)功能。 由于衛(wèi)星在非機(jī)動飛行時繞地球的軌道運動遵循著開普勒方程。
7131
地質(zhì)GIS帝國 ??? 3年前
ADAS輔助駕駛之:BSD盲區(qū)監(jiān)測功能 
相位測角法是利用不同接收通道同一時刻的相位差計算出目標(biāo)角度,相位測角法的原理框圖如圖所示。 圖中,θ 為目標(biāo)徑向方向與天線法線方向的夾角,d 為天線間距,λ 為回波信號的波長。
3138
駕駛哥 ??? 4年前
使用類Sagnac產(chǎn)生矢量波束干涉儀 
該裝置包括螺旋相位的SLM、偏振分束器和四分之一波片。
2189
畫屏 ??? 1年前
VirtualLab Fusion中的光學(xué)各向異性介質(zhì) 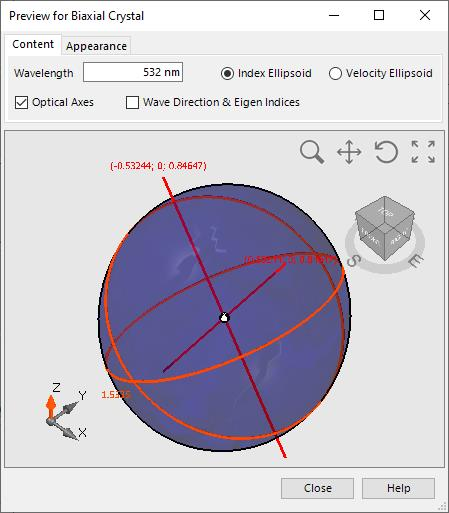
各向異性晶體板 各向異性分層介質(zhì)組件 各向異性表面 波片計算器 晶體板組件(Crystal Plate Component)和主窗口的計算器模塊(Calculators)允許訪問波片計算器,它可用于確定具有給定特性的波片的厚度和相位延遲。
1217
追光ing ??? 9月前
VirtualLab Fusion中的光學(xué)各向異性介質(zhì) 
VirtualLab Fusion提供了一種快速和嚴(yán)格的場跟蹤分析算法,該算法應(yīng)用于S矩陣求解器,并工作在k域。在本應(yīng)用案例中,介紹了各向異性介質(zhì)的基本配置。
1538
信光嗎 ??? 9月前
激光測距傳感器在室內(nèi)無人機(jī)定位追蹤中的應(yīng)用 
基于此無人機(jī)目標(biāo)識別與跟蹤技術(shù)的基本原理通過無人機(jī)搭載的攝像頭或其他傳感器設(shè)備,采集環(huán)境信息,然后通過算法分析這些信息,識別出目標(biāo)物體并將其位置、形狀等信息進(jìn)行精確跟蹤。這一過程涉及到圖像處理、模式識別、計算機(jī)視覺等多個領(lǐng)域的知識。 為了無人機(jī)可以準(zhǔn)確感知周圍環(huán)境的三維結(jié)構(gòu),實現(xiàn)自主避障和精準(zhǔn)定位,大大提升無人機(jī)的安全性和定位精度。可采用激光測距傳感器。
2287
摩天射頻 ??? 1年前
前沿進(jìn)展 | 多焦點光場顯微成像技術(shù) 
這種相位調(diào)制方式使得sLFM技術(shù)更具靈活性。在后續(xù)的工作中,研究人員將探索更復(fù)雜的相位編碼,進(jìn)一步優(yōu)化sLFM的成像性能,推動高質(zhì)量大范圍活體三維成像技術(shù)的發(fā)展。
2773
光與影 ??? 3年前
旋轉(zhuǎn)機(jī)械階次模態(tài)分析技術(shù) 
OBMA方法認(rèn)為轉(zhuǎn)子升速或降速的過程是一個掃頻激勵的過程,將階次跟蹤(Order Tracking,OT)技術(shù)與傳統(tǒng)的運行模態(tài)分析方法相結(jié)合,利用階次跟蹤技術(shù)提取旋轉(zhuǎn)機(jī)械在某一階激勵下的幅值和相位隨轉(zhuǎn)速上升或下降的變化趨勢,進(jìn)行處理后將其作為偽頻響函數(shù),進(jìn)行模態(tài)參數(shù)識別。2006年,Janssens等首次明確提出了基于階次的運行模態(tài)分析方法。
3079
漢航 ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
