



脈沖雷達應(yīng)用說明--HK-PG1000 
初級脈沖雷達以下應(yīng)用說明是關(guān)于脈沖發(fā)生器 HK-PG-1000在雷達應(yīng)用中的用途。初級雷達產(chǎn)生照亮目標的信號并接收其回波。根據(jù)調(diào)制(模擬或數(shù)字)和生成信號的不連續(xù)性,可以區(qū)分不同類型的雷達。最簡單的雷達是脈沖雷達,它不使用任何類型的調(diào)制,但它在短時間內(nèi)產(chǎn)生信號并接收目標產(chǎn)生的反射信號的回波響應(yīng)。
2101 1
虹科-馬穎 ??? 3年前
激光雷達超遠距離測距技術(shù) 
在我國北斗三號衛(wèi)星激光通信終端及其他編隊飛行器設(shè)計中采用了雙向單程的星間測距方案。傳統(tǒng)激光交會對接雷達工作原理是雷達通過計算發(fā)射脈沖與從合作目標反射的回波脈沖之間時間差反算距離,由于信號反射與空間傳輸損耗較大,所以當前交會對接激光雷達的最遠距離約20km。若要在更遠的距離上實現(xiàn)交會對接功能,則必須借鑒雙向單程的星間測距原理,在目標航天器上安裝合作目標雷達,完成雙向測距。
1077
威睛光學 ??? 2月前
CFD學習:低雷達截面如何影響空氣動力性能 
可以使用單基地 雷達方程估計沿特定方向的接收功率: 雷達系統(tǒng)接收到的功率(以雷達參數(shù)和目標雷達橫截面表示)。 在長距離限制下,目標與雷達之間的距離遠大于目標的尺寸,RCS 接近下面列出的值。出現(xiàn)以下近似值是因為,在長距離的限制下,反射入射雷達脈沖的目標物體就像點源一樣。 RCS在遠距離限制。 從這對方程我們可以看出,如果RCS值較低,那么接收功率也會較低。
2255
Cadence CFD學習 ??? 2年前
從原理到應(yīng)用教你了解毫米波雷達 
視頻1 TI公司工程師在ROS中使用毫米波雷達實現(xiàn)機器人的障礙物避障與導航效果[3] 移動平臺下的多目標跟蹤 多目標跟蹤算法能夠根據(jù)傳感器的數(shù)據(jù)對多個目標進行跟蹤和識別,這類傳感器可以是攝像頭、激光雷達和毫米波雷達等,也可以是幾種傳感器的組合。
4544 1
無人機圈 ??? 2年前
知語云:低慢小無人機管制反制監(jiān)測 探測偵測方式方法? 
雷達探測“低慢小”無人機則有以下突破口(1)設(shè)計合適的雷達體制、信號頻率等;(2)開發(fā)更高效的雜波抑制、自適應(yīng)恒虛警檢測、點跡聚集、脈沖壓縮和單脈沖測角等關(guān)鍵算法。具體可考慮以下內(nèi)容 1)脈沖雷達信號處理簡便成熟,探測的距離長,但就是價格昂貴,存在中近距盲區(qū),發(fā)射的源功率高、體積大,距離分辨力低。
4646 8 2
用戶_34138 ??? 2年前
干貨|自動駕駛系統(tǒng)中感知傳感器實物仿真測試環(huán)境構(gòu)建 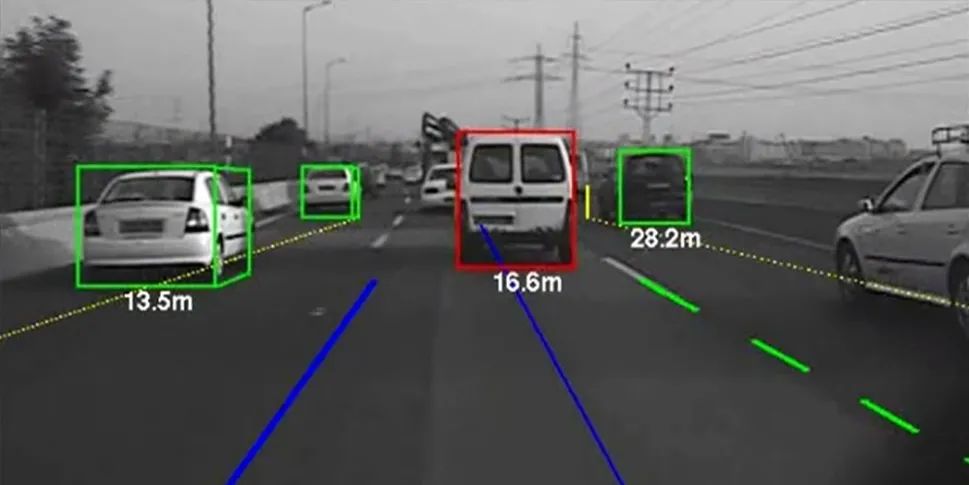
圖3 視覺攝像頭黑箱結(jié)構(gòu)示意圖 目前自動駕駛系統(tǒng)中應(yīng)用的攝像頭有兩種類型,單目攝像頭和雙目攝像頭,后者因為提供了復(fù)數(shù)的攝像頭視點,虛擬目標需能夠模擬出視角偏差效果,所以目前上述兩者方案暫不能支持雙目攝像頭的目標模擬。■ 核心傳感器①:毫米波雷達的功能?構(gòu)造?應(yīng)用 自動駕駛技術(shù)中另一個廣泛使用的傳感器就是毫米波雷達。
4046
EDC電驅(qū)未來 ??? 2年前
陣風-C雷達散射模擬——Rafale-C radar scattering simulation 
模擬目標:我們的模擬目的是評估陣風-C(空軍版)在4個頻率下的平均和中值雷達橫截面以及雷達散射模式: 甚高頻 – 150 兆赫 L 波段 – 1150 MHz S 波段 – 3150 MHz X 波段 – 8150 MHz我們模擬中的陣風-C將以3種武器配置進行模擬。
3732 3
萬有引力LYQ ??? 2年前
潛艇目標模擬器未來技術(shù)展望
03其他創(chuàng)新舉措可明顯擴展任務(wù)能力(區(qū)域檢查,無線電通信時AUV無需浮出水面等等)的一項創(chuàng)新舉措是:為AUV裝備自己的專用水下航行器,主要可安裝在大型AUV上,如俄羅斯的Cephalopod、美國的Manta和Proteus AUV(圖2、3、4)。另一種方法是在AUV上安裝雷達對抗裝置和假雷達目標,以增加模擬潛艇的逼真度。
3037 2 2
海工 ??? 3年前
SAR雷達的工作原理
與其它大多數(shù)雷達一樣,合成孔徑雷達通過發(fā)射電磁脈沖和接收目標回波之間的時間差測定距離,其分辨率與脈沖寬度或脈沖持續(xù)時間有關(guān),脈寬越窄分辨率越高。合成孔徑雷達通常裝在飛機或衛(wèi)星上,分為機載和星載兩種。合成孔徑雷達按平臺的運動航跡來測距和二維成像,其兩維坐標信息分別為距離信息和垂直于距離上的方位信息。
2509
正弦波王莊 ??? 2年前
一文讀懂汽車芯片--激光雷達及車規(guī)AEC-Q102認證 
激光雷達主流分類方式及優(yōu)劣性 2.產(chǎn)業(yè)鏈激光雷達產(chǎn)業(yè)鏈上游為激光器、光源、光學部件、振鏡、模擬芯片、FPGA芯片等;產(chǎn)業(yè)鏈中游為激光雷達硬件廠商;下游產(chǎn)業(yè)鏈按照應(yīng)用領(lǐng)域主要分為自動駕駛、高級輔助駕駛、服務(wù)機器人和車聯(lián)網(wǎng)行業(yè)。整體而言,激光雷達全產(chǎn)業(yè)鏈表現(xiàn)出發(fā)展速度快、科技水平高、創(chuàng)新能力強、市場前景廣闊的突出特點。
2319
falab ??? 2年前
一文了解面向無人駕駛感知系統(tǒng)的仿真驗證技術(shù) 
基于物理的激光雷達模型包含有旋轉(zhuǎn)式和固態(tài)掃描式兩種模式,通過對環(huán)境、脈沖發(fā)射器、脈沖接收器光學組件、脈沖接收器電學組件、處理器模型等三十多個物理參數(shù)的設(shè)置,可以表現(xiàn)出激光雷達探測中出現(xiàn)的回波損失、光譜吸收、運動畸變等一系列物理現(xiàn)象,實現(xiàn)激光脈沖原始點云數(shù)據(jù)、回波強度數(shù)據(jù)和波形數(shù)據(jù)等信息輸出。
2606 2 1
Ansys中國 ??? 4年前
汽車自動駕駛輔助系統(tǒng)電磁安全性研究 
a.將雷達目標模擬器放置在被測車輛毫米波雷達前方1m左右,并將路徑距離輸入雷達目標模擬器以補償傳輸路徑損耗。 b.被測車輛與雷達目標模擬器中間放置中空的吸波暗箱,確保試驗環(huán)境中無偽目標存在。
2446
順風起飛 ??? 4年前
關(guān)注:量子探測技術(shù)進展 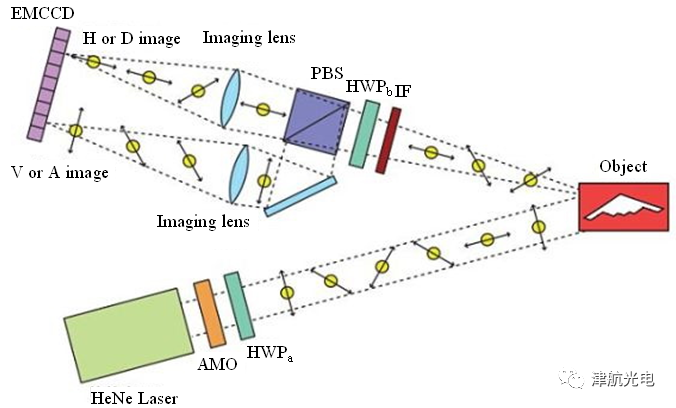
其工作過程如圖1所示,He-Ne激光器發(fā)出波長為0.6328μm的激光,經(jīng)過聲光調(diào)制裝置產(chǎn)生0度、45度、90度和135度四種偏振態(tài),照射目標,模擬遠距離傳輸進一步衰減為平均每脈沖含有一個光子的脈沖序列。這些單光子脈沖信號經(jīng)過極化分束器分束,再經(jīng)過透鏡匯聚然后由EMCCD探測四種不同偏振態(tài)的回波光子,最后給出目標的成像結(jié)果,通過錯誤率分析判斷信號是否受到干擾。
2282
光與影 ??? 3年前
[Optiwave] OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計 ![[Optiwave] OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計](https://img.jishulink.com/msimage/202509/d1f6261cd27efd5a2ea6acf7c034df32.png?image_process=resize,fw_294,fh_172,)
) 1)原理簡介 使用激光脈沖,飛行時間測距法測量發(fā)射脈沖從發(fā)射裝置行進到目標并返回接收器所花費的時間。
2378
信光嗎 ??? 8月前
復(fù)雜工況和惡劣天氣,檢驗自動駕駛能力的“試金石” 
相關(guān)人員通過對不同大小雨滴進行測試后發(fā)現(xiàn),中、小雨滴造成的激光脈沖功率衰減不足以影響雨滴后面物體的測量,通過多次回波算法可以過濾掉雨滴散射后的回波脈沖。 但是當雨足夠大,足夠密,足夠亂時,雨滴之間相互撞擊會形成團狀霧。激光脈沖打到團狀霧后,相比中、小雨天氣,反射的回波脈沖能量會變強,穿過雨滴的脈沖能量會變小,這極易導致激光雷達將其識別為虛假障礙物。
2137 1 1
駕駛哥 ??? 4年前
OptiSystem 應(yīng)用:激光雷達系統(tǒng)設(shè)計 
簡介:激光探測和測距系統(tǒng)(LIDAR)以下四個示例設(shè)計演示了如何使用OptiSystem模擬光檢測和測距系統(tǒng)(LIDAR),具體如下:?激光脈沖飛行時間測量?相移測距?調(diào)頻連續(xù)波(FMCW)直接檢測測距和調(diào)頻連續(xù)波相干測距圖1使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖1.測距(飛行時間)1)原理簡介?使用激光脈沖,飛行時間測距法測量發(fā)射脈沖從發(fā)射裝置行進到目標并返回接收器所花費的時間
2266
追光ing ??? 8月前
Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統(tǒng)建模(中) 
點擊圖片查看培訓詳情 相關(guān)閱讀 Ansys Zemax | 模擬 AR 系統(tǒng)中的全息光波導:第一部分 Ansys Zemax | 如何設(shè)計單透鏡 第一部分:設(shè)置 Ansys Zemax | 如何使用漸暈系數(shù) Ansys Zemax | 抬頭顯示器設(shè)計:從 OpticStudio 至 SPEOS
2036 1
宇熠科技 ??? 3年前
智能汽車中毫米波雷達的應(yīng)用 
智能汽車中毫米波雷達的作用 半導體公司基于CMOS的單芯片解決方案的量產(chǎn)正在加速毫米波雷達的部署,單芯片一方面降低了整個77Ghz雷達的研發(fā)難度,另一方面使得產(chǎn)品的合格率與成本都發(fā)生很大變化。 單芯片的高度集成使得目標位置,速度等信息都能進行多傳感器的融合判斷,這也加速了毫米波雷達在汽車和工業(yè)領(lǐng)域的使用。
2728
芝能汽車 ??? 4年前
自動駕駛關(guān)鍵技術(shù)淺析 
毫米波雷達應(yīng)用于自動駕駛車的防撞系統(tǒng),其基本原理:車載毫米波雷達利用電磁波發(fā)射后遇到障礙物反射的回波對其不斷檢測,計算出與前方或后方障礙物的相對速度和距離。 激光雷達是一種不可替代的傳感器 激光雷達,即利用激光來進行探測和測量。其原理是向周圍發(fā)射脈沖激光,遇到物體后反射回來,通過來回的時間差,計算出距離,從而對周圍環(huán)境建立起三維模型。
2356 1
洋娃娃和小熊 ??? 4年前
Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統(tǒng)建模(上) 
點擊圖片查看培訓詳情 相關(guān)閱讀 Ansys Zemax | 模擬 AR 系統(tǒng)中的全息光波導:第一部分 Ansys Zemax | 如何設(shè)計單透鏡 第一部分:設(shè)置 Ansys Zemax | 如何使用漸暈系數(shù) Ansys Zemax | 抬頭顯示器設(shè)計:從 OpticStudio 至 SPEOS
2130
宇熠科技 ??? 3年前
20條/頁 
 29
29 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
