



農(nóng)業(yè)機(jī)械清選仿真-Fluent-RockyDEM單向耦合 
點(diǎn)擊View按鈕在圖形界面查看顆粒形狀。
3125 9 5
臨淮散仙 ??? 3年前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
(2) 打開ADAMS/View,將保存好的“Parasolid(x_t)”類型的文件依次導(dǎo)入,如圖5-11所示為“部件”打開,其目的是保證每個(gè)部件內(nèi)的零件都相對(duì)固定為一個(gè)整體。 導(dǎo)入后的ADAMS模型如圖5-12。
2373
余俊煒 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn) 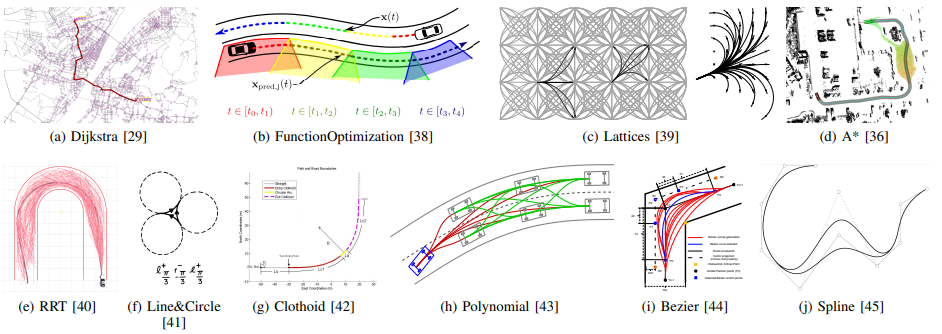
由于感知的不確定性會(huì)造成Motion Planning結(jié)果的不安全性。一種簡單的處理方式是加buffer,但是粗暴的處理方式會(huì)減小Motion Planning的可行域,可能造成過于激進(jìn)或者過于保守的行駛策略。論文[7]以裝備了Around View Monitoring(AVM)的泊車應(yīng)用為例,由于感知誤差會(huì)使路徑規(guī)劃在實(shí)際超車位置停車,可能會(huì)發(fā)生碰撞,如下左圖所示。
2210
駕駛哥 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn)
由于感知的不確定性會(huì)造成Motion Planning結(jié)果的不安全性。一種簡單的處理方式是加buffer,但是粗暴的處理方式會(huì)減小Motion Planning的可行域,可能造成過于激進(jìn)或者過于保守的行駛策略。論文[7]以裝備了Around View Monitoring(AVM)的泊車應(yīng)用為例,由于感知誤差會(huì)使路徑規(guī)劃在實(shí)際超車位置停車,可能會(huì)發(fā)生碰撞,如下左圖所示。
1993
芝能汽車 ??? 3年前
設(shè)計(jì)仿真 | Adams Car中定制試驗(yàn)臺(tái) 
包含部件base(屬于大地)及post(包含幾何post及pad),post與大地之間是移動(dòng)副,并建立joint_motion(后續(xù)對(duì)motion進(jìn)行修改,并提交計(jì)算),位置通過wheel_center通訊器進(jìn)行設(shè)置(裝配后會(huì)根據(jù)此通訊器進(jìn)行調(diào)整)。
2846 1
海克斯康設(shè)計(jì)與仿真 ??? 2年前
Particleworks和RecurDyn聯(lián)合仿真案例-入門案例液箱晃蕩 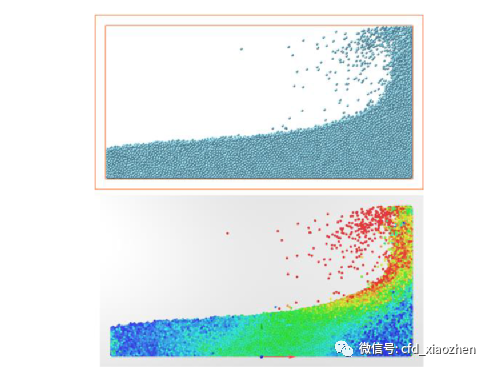
選定Include Motion,點(diǎn)擊Motion按鈕。 6. 設(shè)置Type為Displacement,點(diǎn)擊EL按鈕。 7.
3284 2 2
CAE仿真學(xué)習(xí)菌 ??? 2年前
基于Adams的六足直立式步行機(jī)器人運(yùn)動(dòng)仿真分析 
[6] MSC.Software.MSC.ADAMS∕View高級(jí)培訓(xùn)教程[M].邢俊文,陶永忠,譯.北京:清華大學(xué)出版社,2004:7-10.MSC.Software.MSC.ADAMS∕View Advanced training course[M].XING Junwen,TAO Yongzhong,Jr.Beijing:Tsinghua University Press,2004:7-10
4176 7 8
仿真客 ??? 3年前
Adams Car中定制試驗(yàn)臺(tái) 
包含部件base(屬于大地)及post(包含幾何post及pad),post與大地之間是移動(dòng)副,并建立joint_motion(后續(xù)對(duì)motion進(jìn)行修改,并提交計(jì)算),位置通過wheel_center通訊器進(jìn)行設(shè)置(裝配后會(huì)根據(jù)此通訊器進(jìn)行調(diào)整)。臺(tái)架的加載客戶定制的功能,原則上需要與軟件的安裝目錄分隔,防止使用過程中破壞原來的產(chǎn)品結(jié)構(gòu),從而影響軟件的使用。
2652
Cruise ??? 2年前
案例教程|創(chuàng)建周期性網(wǎng)格 
rame Motion,設(shè)定正確的旋轉(zhuǎn)軸"Rotation-Axis Direction"。 模型的旋轉(zhuǎn)軸為X,在X方向上設(shè)定1,Y軸Z軸為0。 果存在多個(gè)區(qū)域,且區(qū)域內(nèi)包括周期性邊界,則該區(qū)域也要按此設(shè)置,只不過將旋轉(zhuǎn)速度設(shè)置為0)。
3795 9 7
BB學(xué)長 ??? 4年前
基于STAR-CCM+機(jī)艙熱管理分析報(bào)告 
2.瞬態(tài)計(jì)算 采用motion進(jìn)行計(jì)算。
3304 4
仿真客 ??? 3年前
自動(dòng)駕駛系統(tǒng)的傳感器標(biāo)定方法 
這里通過東京大學(xué)的論文“LiDAR and Camera Calibration using Motion Estimated by Sensor Fusion Odometry”來看看激光雷達(dá)和攝像頭的標(biāo)定算法。顯然它是求解一個(gè)手-眼標(biāo)定的擴(kuò)展問題-,即2D-3D標(biāo)定,如圖所示:求解激光雷達(dá)的姿態(tài)變化采用ICP,而攝像頭的運(yùn)動(dòng)采用特征匹配。
2297
駕駛哥 ??? 3年前
激光雷達(dá):點(diǎn)云語義分割算法 
Multi-view(左)和Range-View(右)此外,我們還可以將3D點(diǎn)云投影到RangeView。對(duì)于采用水平和垂直掃描的LiDAR來說,點(diǎn)云中的每個(gè)掃描點(diǎn)自然的就有水平和垂直兩個(gè)角度,而且這些角度都是離散的,其個(gè)數(shù)取決于相應(yīng)的分辨率。比如128線的LiDAR,其垂直角度個(gè)數(shù)就是128。假設(shè)其水平角度分辨率為0.5度,那么其掃描一周就產(chǎn)生了720個(gè)角度。
2796
駕駛哥 ??? 4年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
