



六軸機(jī)械臂(帶抓手)運(yùn)動(dòng)學(xué)分析+軌跡規(guī)劃 
1正運(yùn)動(dòng)學(xué)分析 采用標(biāo)準(zhǔn)的D-h法進(jìn)行機(jī)械腿模型分析: D-h表如下 (2)通過(guò)(1)求解出機(jī)器人各位姿變換矩陣后,求解機(jī)器人手臂變換矩陣。通過(guò)matlab 計(jì)算,寫(xiě)出機(jī)器人末端位置。
5217 1
余俊煒 ??? 2年前
58基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT 
基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中將搜索的起點(diǎn)位置作為根節(jié)點(diǎn),然后通過(guò)隨機(jī)采樣增加葉子節(jié)點(diǎn)的方式,生成一個(gè)隨機(jī)擴(kuò)展樹(shù),當(dāng)隨機(jī)樹(shù)的葉子節(jié)點(diǎn)進(jìn)入目標(biāo)區(qū)域,就得到了從起點(diǎn)位置到目標(biāo)位置的路徑。程序已調(diào)通,可直接運(yùn)行。
2110
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
【案例分享】南通中遠(yuǎn)海運(yùn)川崎船舶運(yùn)動(dòng)軌跡智能分析及預(yù)測(cè) 
之后對(duì)數(shù)據(jù)集進(jìn)行相關(guān)性分析,根據(jù)相關(guān)性分析,輸出變量和輸入變量之間的線性相關(guān)性較弱,表明輸入輸出變量之間的關(guān)系較為復(fù)雜;輸入變量?jī)?nèi)部相關(guān)性相對(duì)較弱,可以反映出輸入變量?jī)?nèi)部不存在冗余變量。3. 建模流程 項(xiàng)目建模流程如圖所示。4. 建模流程 本項(xiàng)目共采用了4種方法對(duì)船舶運(yùn)動(dòng)軌跡進(jìn)行預(yù)測(cè)。
2340
天洑軟件 ??? 1年前
Adams&Workbench&Matlab四連桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析 
已知四連桿機(jī)構(gòu)的相關(guān)參數(shù),通過(guò)數(shù)學(xué)公式便可推導(dǎo)出其運(yùn)動(dòng)學(xué)模型,并將其運(yùn)動(dòng)學(xué)模型利用Matlab語(yǔ)言進(jìn)行編寫(xiě),其代碼如圖6所示。
2810
擺渡人張 ??? 2年前
1-58基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees) 

基于matlab的采樣的運(yùn)動(dòng)規(guī)劃算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中將搜索的起點(diǎn)位置作為根節(jié)點(diǎn),然后通過(guò)隨機(jī)采樣增加葉子節(jié)點(diǎn)的方式,生成一個(gè)隨機(jī)擴(kuò)展樹(shù),當(dāng)隨機(jī)樹(shù)的葉子節(jié)點(diǎn)進(jìn)入目標(biāo)區(qū)域,就得到了從起點(diǎn)位置到目標(biāo)位置的路徑。程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
276
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于精準(zhǔn)碰撞檢測(cè)算法的機(jī)械臂避障軌跡規(guī)劃 
通過(guò)對(duì)障礙物與機(jī)械臂進(jìn)行幾何模型簡(jiǎn)化將6自由度機(jī)械臂的碰撞檢測(cè)問(wèn)題轉(zhuǎn)化為模型之間最小距離計(jì)算問(wèn)題;結(jié)合機(jī)械臂正逆運(yùn)動(dòng)學(xué)與碰撞檢測(cè)結(jié)果,創(chuàng)建遺傳優(yōu)化算法的適應(yīng)度函數(shù),使機(jī)械臂在完成避障的同時(shí)優(yōu)化各關(guān)節(jié)軌跡長(zhǎng)度和轉(zhuǎn)動(dòng)角度,將機(jī)械臂避障軌跡規(guī)劃問(wèn)題轉(zhuǎn)化為約束條件下的多目標(biāo)優(yōu)化問(wèn)題。最后通過(guò)MATLAB對(duì)算法進(jìn)行仿真實(shí)驗(yàn),結(jié)果表明,該算法在多種障礙物的環(huán)境下能夠規(guī)劃出滿足要求的運(yùn)動(dòng)軌跡。1.
3496 6 3
機(jī)械設(shè)計(jì)師 ??? 4年前
158基于matlab的用于分析弧齒錐齒輪嚙合軌跡的程序 
基于matlab的用于分析弧齒錐齒輪嚙合軌跡的程序,輸出齒輪嚙合軌跡及傳遞誤差。程序已調(diào)通,可直接運(yùn)行。
1966
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
203基于matlab的曲柄滑塊機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真分析GUI 
基于matlab的曲柄滑塊機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真分析GUI,包括《系統(tǒng)仿真與matlab》綜合試題文檔。分析滑塊速度、角速度,曲軸投影長(zhǎng)。曲柄滑塊機(jī)構(gòu)的動(dòng)畫(huà)。程序已調(diào)通,可直接運(yùn)行。
2222
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于ADAMS的點(diǎn)按手法運(yùn)動(dòng)仿真 
只要給定了D-H參數(shù),就可以計(jì)算得出機(jī)器人手臂末端在給定坐標(biāo)系下的運(yùn)動(dòng)軌跡。給定一組關(guān)節(jié)角θi向量,就對(duì)應(yīng)末端軌跡上的一點(diǎn)。當(dāng)然這是相對(duì)于非冗余自由度機(jī)器人手臂。反之,當(dāng)給定了機(jī)器人手臂的末端軌跡,反解出關(guān)節(jié)角θi。機(jī)器人手臂的正、逆運(yùn)動(dòng)學(xué)計(jì)算是比較復(fù)雜的,可以借助MATLAB進(jìn)行計(jì)算。
3012 2
擺渡人張 ??? 2年前
202基于matlab的曲柄滑塊機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真分析 
基于matlab的曲柄滑塊機(jī)構(gòu)的運(yùn)動(dòng)學(xué)仿真分析,分析各個(gè)桿的速度、位移、加速度曲線,以及曲柄滑塊機(jī)構(gòu)的動(dòng)畫(huà)。程序已調(diào)通,可直接運(yùn)行。
2152
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于matlab求解二維非穩(wěn)態(tài)對(duì)流擴(kuò)散反應(yīng)問(wèn)題 
旅行商問(wèn)題(TSP)、車輛路徑問(wèn)題(VRP、MVRP、CVRP、VRPTW等)、無(wú)人機(jī)三維路徑規(guī)劃、無(wú)人機(jī)協(xié)同、無(wú)人機(jī)編隊(duì)、機(jī)器人路徑規(guī)劃、柵格地圖路徑規(guī)劃、多式聯(lián)運(yùn)運(yùn)輸問(wèn)題、車輛協(xié)同無(wú)人機(jī)路徑規(guī)劃、天線線性陣列分布優(yōu)化、車間布局優(yōu)化4 無(wú)人機(jī)應(yīng)用方面無(wú)人機(jī)路徑規(guī)劃、無(wú)人機(jī)控制、無(wú)人機(jī)編隊(duì)、無(wú)人機(jī)協(xié)同、無(wú)人機(jī)任務(wù)分配、無(wú)人機(jī)安全通信軌跡在線優(yōu)化5 無(wú)線傳感器定位及布局方面
2287 1 1
Matlab心得交流 ??? 2年前
機(jī)械臂B樣條插補(bǔ)軌跡規(guī)劃 
正逆運(yùn)動(dòng)學(xué)分析與軌跡規(guī)劃服務(wù)需要技術(shù)服務(wù)聯(lián)系qq2386317960
2121
余俊煒 ??? 3年前
一種基于目標(biāo)的可解釋的自動(dòng)駕駛預(yù)測(cè)和規(guī)劃策略 
為此,利用可解釋的基于目標(biāo)行為分析的預(yù)測(cè)和規(guī)劃 (IGP2),利用有限空間下的運(yùn)動(dòng)分析計(jì)算優(yōu)勢(shì),可以很好的擴(kuò)展機(jī)動(dòng)序列的規(guī)劃和預(yù)測(cè)方法。通過(guò)理性逆向規(guī)劃的新穎整合來(lái)實(shí)現(xiàn)這一目標(biāo),以識(shí)別其他車輛目標(biāo),并使用蒙特卡洛樹(shù)搜索 (MCTS)為自車規(guī)劃最佳行動(dòng)軌跡。
4346 7 2
駕駛哥 ??? 2年前
火箭動(dòng)力學(xué)科研利器—最佳計(jì)算設(shè)備硬件配置方案探討 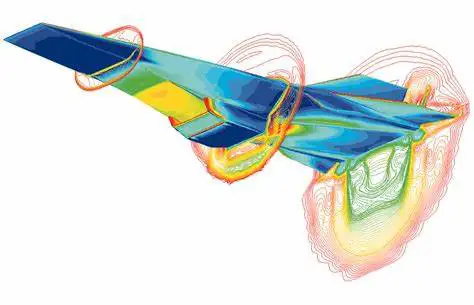
§ 導(dǎo)彈軌跡分析: 用于模擬和分析導(dǎo)彈的飛行軌跡和飛行性能。§ 航天任務(wù)規(guī)劃: 可用于計(jì)劃航天任務(wù)的軌道、時(shí)間和資源分配。CPU核心: STK的計(jì)算通常可以在單核或多核CPU上運(yùn)行,但一些計(jì)算可能會(huì)受益于多核處理器的并行計(jì)算能力。內(nèi)存容量和帶寬: STK涉及大量的計(jì)算和數(shù)據(jù)加載,足夠的內(nèi)存容量和高內(nèi)存帶寬對(duì)于保持良好的性能至關(guān)重要。
2510 1
UltraLAB ??? 2年前
飛行器系統(tǒng)仿真與驗(yàn)證 
下面進(jìn)行說(shuō)明:總體設(shè)計(jì)過(guò)程主要針對(duì)幾何、氣動(dòng)、推進(jìn)、飛行剖面、熱、結(jié)構(gòu)、穩(wěn)定性與控制和費(fèi)用指標(biāo)等來(lái)展開(kāi)設(shè)計(jì)過(guò)程,主要依靠工程計(jì)算程序來(lái)實(shí)現(xiàn),有一定的流程及程序間先用的調(diào)用順序可以遵循,通過(guò)總體設(shè)計(jì)流程建設(shè),定義、規(guī)劃流程動(dòng)作,定義流程動(dòng)作的輸入、輸出,定義、規(guī)劃數(shù)據(jù)模型,定義流程中的數(shù)據(jù)模型,實(shí)現(xiàn)分析流程的標(biāo)準(zhǔn)化、規(guī)范化和自動(dòng)化,提高數(shù)據(jù)流的管理效率。
3814 2 1
航發(fā)設(shè)計(jì) ??? 3年前
小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
為獲得更好的運(yùn)動(dòng)效果,可采用五次多項(xiàng)式軌跡進(jìn)行足端軌跡規(guī)劃,并在機(jī)器人行走前對(duì) 4 條腿的初始位置進(jìn)行調(diào)整,使得在行走過(guò)程中,重心相對(duì)于支撐腳連線的運(yùn)動(dòng)盡量保證前后對(duì)稱,提高行走過(guò)程中機(jī)身穩(wěn)定。最后,根據(jù)仿真結(jié)果對(duì)設(shè)計(jì)方案進(jìn)行優(yōu)化,提高機(jī)器人結(jié)構(gòu)的合理性。理論就說(shuō)到這了,如果想親自體驗(yàn)一番的話,可以掃碼領(lǐng)取北鯤云2000核時(shí)免費(fèi)體驗(yàn)券在北鯤云超算平臺(tái)進(jìn)行仿真模擬計(jì)算。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
圓弧插值算法(有代碼) 
正逆運(yùn)動(dòng)學(xué)分析與軌跡規(guī)劃\]](https://link.zhihu.com/?
2480
余俊煒 ??? 2年前
六軸碼垛機(jī)器人admas正逆運(yùn)動(dòng)學(xué)仿真 
圖5-11 導(dǎo)入ADAMS的部件選擇 圖5-12 導(dǎo)入ADAMS的樣機(jī)模型 5.4 機(jī)器人運(yùn)動(dòng)學(xué)仿真 5.4.1 軌跡規(guī)劃 軌跡規(guī)劃即為求解機(jī)器人運(yùn)動(dòng)學(xué)逆解的過(guò)程。將機(jī)器人模型導(dǎo)入ADAMS后,首先是為機(jī)器人添加材料,本機(jī)器人結(jié)構(gòu)為鋁合金。
2373
余俊煒 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問(wèn)題與挑戰(zhàn) 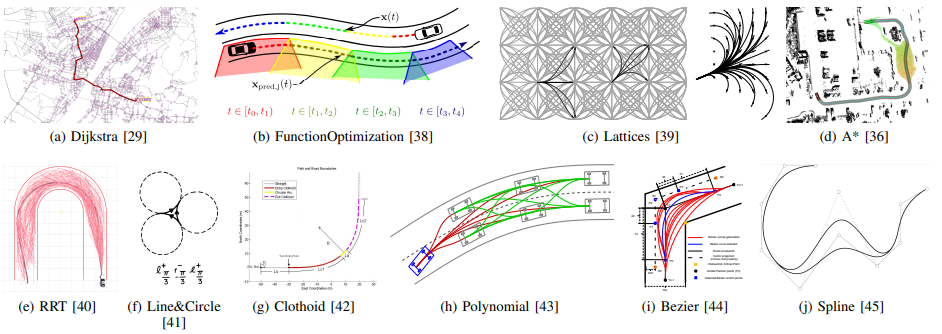
正如人的大腦又分為左腦和右腦一樣,決策規(guī)劃模塊又可以繼續(xù)分為行為決策層(Behavioral Layer)和運(yùn)動(dòng)規(guī)劃層(Motion Planning)。 其中,行為決策層在接收到全局路徑后,結(jié)合感知信息,進(jìn)行具體的行為決策;運(yùn)動(dòng)規(guī)劃層根據(jù)具體的行為決策,規(guī)劃生成一條滿足特定約束條件的軌跡,該軌跡作為控制模塊的輸入決定車輛最終行駛路徑。
2213
駕駛哥 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問(wèn)題與挑戰(zhàn)
正如人的大腦又分為左腦和右腦一樣,決策規(guī)劃模塊又可以繼續(xù)分為行為決策層(Behavioral Layer)和運(yùn)動(dòng)規(guī)劃層(Motion Planning)。 其中,行為決策層在接收到全局路徑后,結(jié)合感知信息,進(jìn)行具體的行為決策;運(yùn)動(dòng)規(guī)劃層根據(jù)具體的行為決策,規(guī)劃生成一條滿足特定約束條件的軌跡,該軌跡作為控制模塊的輸入決定車輛最終行駛路徑。
1994
芝能汽車 ??? 3年前
20條/頁(yè) 
 26
26 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
