



常用參數(shù)自動(dòng)標(biāo)定算法總結(jié)(單純形,遺傳算法,貝葉斯優(yōu)化算法,粒子群算法等) 
在本推文中介紹四類常用參數(shù)自動(dòng)標(biāo)定方案,分別是單純形方案,粒子群方案,遺傳算法方案,以及貝葉斯優(yōu)化ego方案。單純形方案實(shí)現(xiàn)最簡(jiǎn)單,適用于少參數(shù),更窄的初始區(qū)間粒子群方案,遺傳算法方案適用于多參數(shù)更大的空間適合全局搜索ego方案相比于其余三類方案的優(yōu)勢(shì)體現(xiàn)為EGO使用代理模型(如高斯過程回歸)來預(yù)測(cè)目標(biāo)函數(shù),極大減少了實(shí)際函數(shù)評(píng)估次數(shù)。
2570 1
晶體塑性有限元 ??? 1年前
251 基于matlab的動(dòng)態(tài)粒子群算法 
基于matlab的動(dòng)態(tài)粒子群算法。普通粒子群算法無(wú)法感知外界環(huán)境的變化,在外界環(huán)境發(fā)生改變時(shí)無(wú)法實(shí)時(shí)進(jìn)行響應(yīng),因而缺乏動(dòng)態(tài)環(huán)境尋優(yōu)能力。在普通粒子群算法基本上通過增加敏感粒子得到一種動(dòng)態(tài)粒子群算法,該算法通過實(shí)時(shí)計(jì)算敏感粒子的適應(yīng)度值從而感知外界環(huán)境的變化,當(dāng)外界環(huán)境的變化超過一定的閾值時(shí)算法以按一定比例更新速度和粒子的方式進(jìn)行相應(yīng),從而具有動(dòng)態(tài)環(huán)境尋優(yōu)的功能。
2190
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于粒子群優(yōu)化算法的六自由度機(jī)械臂三維空間避障規(guī)劃 
圖2 三維空間避障路徑規(guī)劃問題描述1.2 粒子群優(yōu)化算法求解粒子群優(yōu)化算法(Particle Swarm Optimization, PSO)是一種基于群體智能的優(yōu)化算法,模擬了鳥群覓食等自然現(xiàn)象,通過個(gè)體間的信息共享來尋找最優(yōu)解。該算法具有簡(jiǎn)單、易實(shí)現(xiàn)和全局搜索能力強(qiáng)等優(yōu)點(diǎn),非常適合用于復(fù)雜環(huán)境下的路徑規(guī)劃問題。
2409
320科技工作室 ??? 1年前
粒子群算法PSO與MATLAB程序視頻教程動(dòng)態(tài)優(yōu)化及多目標(biāo)優(yōu)化 

主要內(nèi)容包括:粒子群算法(PSO)基本概念與算法流程,粒子群算法利用MATLAB程序分析數(shù)模信號(hào),粒子群算法6個(gè)構(gòu)成要素及其選擇經(jīng)驗(yàn),慣性權(quán)重改進(jìn)方法及3個(gè)PSO算法對(duì)比分析,測(cè)試函數(shù)分析粒子群算法的搜索性能,粒子群算法應(yīng)用及存在問題與研究熱點(diǎn),離散粒子群算法與離散二進(jìn)制版粒子群算法,有約束動(dòng)態(tài)慣性權(quán)重的BPSO算法分析背包問題,基于交叉變異的混合粒子群算法分析旅行商問題,基于交換序的粒子群算法再求解旅行商優(yōu)化問題
910 1 10
鄭一 ??? 7年前
粒子群算法原理和matlab程序簡(jiǎn)單講解(粒子群算法入門) 
對(duì)粒子群原理和對(duì)應(yīng)的代碼進(jìn)行了詳細(xì)講解看完基本可以實(shí)現(xiàn)粒子群算法入門
290
活潑可男_matlab教學(xué) ??? 3年前
1-106基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即PID控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo)) 
基于matlab的粒子群算法與 Simulink 模型之間連接的橋梁是粒子(即 PID 控制器參數(shù))和該粒子對(duì)應(yīng)的適應(yīng)值(即控制系統(tǒng)的性能指標(biāo))。
401
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
粒子群優(yōu)化 (PSO)
這些算法可以應(yīng)用由所有實(shí)體共享的簡(jiǎn)單規(guī)則,并能夠利用個(gè)人之間的交互(稱為代理)在相互合作的基礎(chǔ)上解決優(yōu)化問題。
</div><div contenteditable="false" width="100%">
在眾多的群體智能算法中,最常用的兩種算法是粒子群優(yōu)化器 (PSO) 和蟻群優(yōu)化器 (ACO)。
2157
仿真資料吧 ??? 1年前
11基于matlab的多目標(biāo)粒子群算法,MOPSO,引導(dǎo)種群逼近真實(shí)Pareto前沿,算法運(yùn)行結(jié)束后 
基于matlab的多目標(biāo)粒子群算法,MOPSO,引導(dǎo)種群逼近真實(shí)Pareto前沿,算法運(yùn)行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運(yùn)行。
2388 1
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于pytorch的多目標(biāo)粒子群算法 
基于pytorch的多目標(biāo)粒子群算法,MOPSO,引導(dǎo)種群逼近真實(shí)Pareto前沿,算法運(yùn)行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運(yùn)行,標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1808
explicit ??? 2年前
粒子群優(yōu)化 (PSO)
在眾多的群體智能算法中,最常用的兩種算法是粒子群優(yōu)化器 (PSO) 和蟻群優(yōu)化器 (ACO)。在這里,我們將詳細(xì)解釋這兩者: 粒子群優(yōu)化 (PSO) 粒子群優(yōu)化 (PSO) 是一種優(yōu)化技術(shù),其中一組潛在解決方案使用鳥類成群或魚群的社會(huì)行為來解決問題。在集群內(nèi)部,每個(gè)片段都被稱為一個(gè)粒子,它有可能提供解決方案。
2315
仿真資料吧 ??? 1年前
1-05基于pytorch的多目標(biāo)粒子群算法 
基于pytorch的多目標(biāo)粒子群算法,MOPSO,引導(dǎo)種群逼近真實(shí)Pareto前沿,算法運(yùn)行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
209
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-11 基于matlab的多目標(biāo)粒子群算法 
基于matlab的多目標(biāo)粒子群算法,MOPSO,引導(dǎo)種群逼近真實(shí)Pareto前沿,算法運(yùn)行結(jié)束后將外部存檔中粒子作為獲得的Pareto最優(yōu)解近似。程序已調(diào)通,可以直接運(yùn)行。PS:程序運(yùn)行視頻見https://gf.bilibili.com/item/detail/1103082078 購(gòu)買后可下載視頻中的源程序文件。
257
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
Lumerical案例 | 基于粒子群優(yōu)化的雙波段MIM濾波器引領(lǐng)高靈敏度檢測(cè)革新 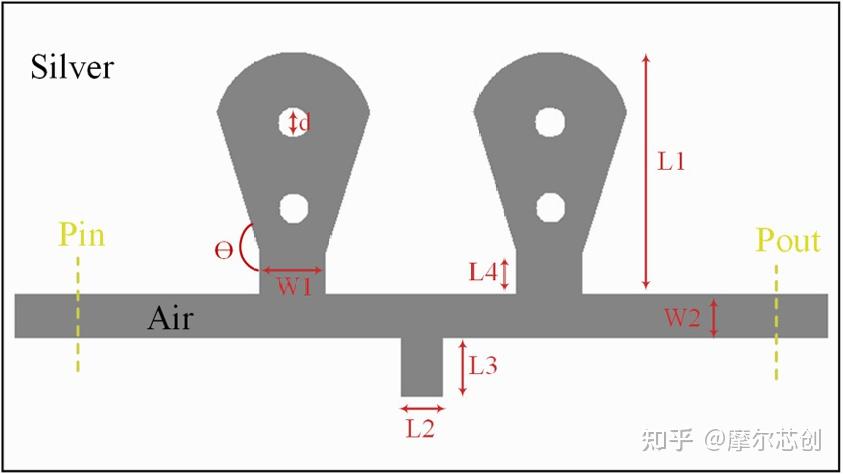
粒子群優(yōu)化算法的精準(zhǔn)調(diào)控為突破傳統(tǒng)優(yōu)化方法的瓶頸,本研究引入粒子群優(yōu)化(PSO)算法對(duì)濾波器尺寸進(jìn)行全局優(yōu)化。在優(yōu)化過程中,PSO算法的目標(biāo)函數(shù)被設(shè)計(jì)為優(yōu)化MIM濾波器的傳輸特性。該算法尋求最大化通帶中的傳輸速率,并最小化截止帶中的傳輸速率(接近于零),以確保有效的濾波性能:其中T(λ)為波長(zhǎng)λ處的傳輸率, 和 分別代表通帶和截止帶波長(zhǎng)。
2489
摩爾芯創(chuàng) ??? 4月前
粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL) 
粒子群優(yōu)化(PSO)、蟻群優(yōu)化(ACO)、遺傳算法(GA)、進(jìn)化策略(ES)和基于概率的增量學(xué)習(xí)(PBIL)。計(jì)算了BBO-MLP、PSO、ACO、ES、GA和PBIL的分類精度并相互比較。輸出每種算法的收斂曲線和分類精度。程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
259
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-89基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法 
基于matlab的人工蜂群和粒子群混合優(yōu)化的路徑規(guī)劃算法,起點(diǎn)和終點(diǎn)確定的前提下,在障礙物中尋找最佳路徑。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
241
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
239 基于matlab的EKF(擴(kuò)展卡爾曼濾波)_UKF(無(wú)跡卡爾曼濾波)_PF(粒子濾波)三種算法的估計(jì)結(jié)果比較 
基于matlab的EKF(擴(kuò)展卡爾曼濾波)_UKF(無(wú)跡卡爾曼濾波)_PF(粒子濾波)三種算法的估計(jì)結(jié)果比較,輸出估計(jì)誤差,并單獨(dú)對(duì)粒子濾波進(jìn)行估計(jì)及其置信區(qū)間可視化。程序已調(diào)通,可直接運(yùn)行。
2199
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
Wolfram 語(yǔ)言|由靜止粒子群產(chǎn)生的子粒子群中粒子的平均速度研究 
模型:在無(wú)窮大的三維空間中放入無(wú)數(shù)多點(diǎn)粒子。這些粒子的速度大小都是 c、方向在三維空間均勻分布,并且它們之間沒有相互作用。本文的研究對(duì)象是這些粒子及它的一個(gè)子集,這個(gè)子集相對(duì)于總體粒子具有速度 u。
1971
墨光科技 ??? 3年前
265 基于matlab的粒子群優(yōu)化分?jǐn)?shù)階灰色預(yù)測(cè)模型 
基于matlab的粒子群優(yōu)化分?jǐn)?shù)階灰色預(yù)測(cè)模型,以誤差結(jié)果為目標(biāo)進(jìn)行預(yù)測(cè),輸出多個(gè)預(yù)測(cè)結(jié)果。并輸出迭代曲線。程序已調(diào)通,可直接運(yùn)行。
2098 1
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
259 基于matlab的知識(shí)遷移的蟻群參數(shù)選擇算法 
基于matlab的知識(shí)遷移的蟻群參數(shù)選擇算法。通過構(gòu)建圖實(shí)現(xiàn)參數(shù)的自主映射。通過設(shè)置二維障礙物,隨機(jī)生成目標(biāo)任務(wù)參數(shù),通過蟻群算法進(jìn)行路徑尋優(yōu)。輸出路徑尋優(yōu)結(jié)果。可自由設(shè)置路徑起始位置。程序已調(diào)通,可直接運(yùn)行。
2142
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
模擬流體中的粒子運(yùn)動(dòng)時(shí),選擇合適的公式以提升計(jì)算效率 
如這里所顯示的,求解器先從采取 1ms 或更小的時(shí)間步開始,然后在粒子接近其最終速度時(shí)逐漸采取更大的時(shí)間步。 如下面的步驟24 所示,在 COMSOL Multiphysics 中,粒子追蹤物理場(chǎng)接口通常使用嚴(yán)格的時(shí)間步算法,該算法至少要求求解器所采取的某些步長(zhǎng)與輸出時(shí)間一致。
3659 7
學(xué)時(shí)習(xí) ??? 2年前
20條/頁(yè) 
 23
23 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
