



基于點(diǎn)云的球銑加工動(dòng)態(tài)仿真 
1 相關(guān)研究點(diǎn)云用于描述三維空間物體表面信息,每個(gè)點(diǎn)都包含三維坐標(biāo),也可能包含深度、密度、顏色信息等,相比于二維圖像數(shù)據(jù),特征準(zhǔn)確,更接近人類的視覺,更容易理解三維場(chǎng)景,但存在無序性、密度不一致、信息不完整等特點(diǎn),對(duì)點(diǎn)云數(shù)據(jù)處理比較復(fù)雜和困難[10]。
4054 5
數(shù)控編程網(wǎng) ??? 2年前
如何獲得CAD點(diǎn)云對(duì)象的截面和輪廓?
加載點(diǎn)云并創(chuàng)建截面(5 分鐘 / 個(gè)截面) 步驟: ① 輸入 POINTCLOUD 加載點(diǎn)云文件(.rcp/.rcs) ② 輸入 SECTIONPLANE → 選擇點(diǎn)云 → 繪制剖切平面(如 XY 平面 Z=100) ③ 右鍵截面平面 → 選擇「生成二維 / 三維截面」→ 勾選「點(diǎn)云截面」 關(guān)鍵設(shè)置: 采樣距離:0.1m(根據(jù)點(diǎn)云密度調(diào)整,越小輪廓越精細(xì))
3464
自學(xué)土木網(wǎng) ??? 1年前
CAD怎樣調(diào)整點(diǎn)云的顯示樣式 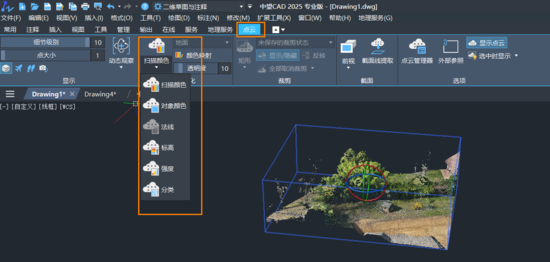
在CAD繪圖工作中,點(diǎn)云數(shù)據(jù)的顯示樣式設(shè)置對(duì)于提高工作效率和圖形的可讀性至關(guān)重要。合適的顯示樣式不僅能夠讓用戶更清晰地觀察點(diǎn)云的細(xì)節(jié)特征,還能減輕視覺疲勞,提升整體工作體驗(yàn)。下面將為大家詳細(xì)介紹CAD中設(shè)置點(diǎn)云顯示樣式的具體方法和相關(guān)技巧。問題描述:針對(duì)輸入的點(diǎn)云數(shù)據(jù),如何更改其顯示樣式?步驟指引:1.CAD2025及以上版本具有該功能。
2318
自學(xué)土木網(wǎng) ??? 10月前
3D目標(biāo)檢測(cè)/點(diǎn)云/遙感數(shù)據(jù)集匯總 
鏈接: 點(diǎn)云分類: https://graphics.cs.msu.ru/en/node/922 2. Semantic3D 大規(guī)模點(diǎn)云分類基準(zhǔn),它提供了一個(gè)帶有大標(biāo)簽的自然場(chǎng)景的3D點(diǎn)云數(shù)據(jù)集,總計(jì)超過40億個(gè)點(diǎn),8個(gè)類別標(biāo)簽。并且還涵蓋了多種多樣的城市場(chǎng)景。
4321 1 1
駕駛哥 ??? 4年前
激光雷達(dá):點(diǎn)云語義分割算法 
2.2 基于網(wǎng)格的方法在3D物體檢測(cè)領(lǐng)域的經(jīng)典方法VoxelNet中,點(diǎn)云被量化為均勻的3D網(wǎng)格(voxel)。配合上3D卷積,圖像語義分割中的全卷積網(wǎng)絡(luò)結(jié)構(gòu)就可以用來處理3D的voxel數(shù)據(jù)。FCPN[6]在三維空間進(jìn)行均勻采樣,每個(gè)采樣的位置收集鄰域內(nèi)固定數(shù)量的點(diǎn)用來提取點(diǎn)特征。
2798
駕駛哥 ??? 4年前
國產(chǎn)首款云三維CAD-CrownCAD 

4月15號(hào),國內(nèi)首款、完全自主可控的新一代基于云架構(gòu)的三維CAD產(chǎn)品CrownCAD正式上線公測(cè)。CrownCAD云CAD將原來基于龐大的三維CAD系統(tǒng)開展的產(chǎn)品設(shè)計(jì)工作搬到云端,打開網(wǎng)頁就能進(jìn)行產(chǎn)品三維設(shè)計(jì),這一技術(shù)目前在國際上也屬于領(lǐng)先水平。云CAD產(chǎn)品CrownCAD的上線有望顛覆傳統(tǒng)基于PC的三維CAD市場(chǎng),實(shí)現(xiàn)國產(chǎn)工業(yè)軟件的彎道超車。
1732 4
蝰蛇設(shè)計(jì) ??? 6年前
點(diǎn)云文件要怎么處理才能便于可視化輸出?
求助大家,有一個(gè)2-3g的點(diǎn)云文件(.pcd),想要用matlab進(jìn)行可視化輸出,但是一波查閱下來還是不知道要做些什么才能便于matlab處理和輸出,請(qǐng)問大家我需要對(duì)這個(gè)大的點(diǎn)云文件進(jìn)行什么操作呢?
2158 1
FEM在路上 ??? 2年前
衛(wèi)星/航拍影像/雷達(dá)點(diǎn)云實(shí)景建模完美配置方案23v1 
時(shí)間真快,進(jìn)入2023年第1季度,計(jì)算硬件又開始升級(jí)換代,本方案--衛(wèi)星/無人機(jī)影像/LiDAR點(diǎn)云處理應(yīng)用硬件配置,我們采用intel第13代超頻處理器和nvidia RTX40系列架構(gòu),提供最新最快衛(wèi)星影像3D建模的計(jì)算處理硬件方案,從臺(tái)式工作站、便攜現(xiàn)場(chǎng)處理工作站、超頻多機(jī)集群處理方案。。。
2483
UltraLAB ??? 3年前
超表面賦能結(jié)構(gòu)光三維重建 | 實(shí)現(xiàn)超大視場(chǎng)高精度實(shí)時(shí)重建 
</strong>結(jié)合雙目視覺技術(shù)與立體匹配算法,實(shí)時(shí)計(jì)算動(dòng)態(tài)圖像的深度信息,生成三維點(diǎn)云;</p><p><strong>3.場(chǎng)景重建執(zhí)行:</strong>通過連續(xù)幀的點(diǎn)云拼接完成增量點(diǎn)云重建,兩臺(tái)相機(jī)同步掃描捕獲空間場(chǎng)景,再利用實(shí)時(shí)映射算法構(gòu)建對(duì)應(yīng)的三維點(diǎn)云與表面模型。
2382
武漢二元 ??? 8月前
三維重建與自動(dòng)駕駛的契合點(diǎn)在哪里?盤一盤近幾年SOTA方法! 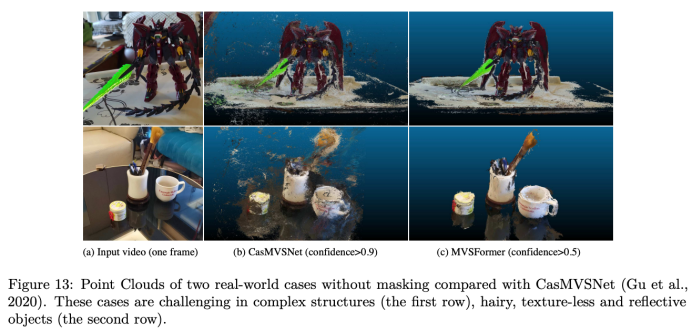
網(wǎng)絡(luò)結(jié)構(gòu)如下: MVSNet的概述如上圖所示,網(wǎng)絡(luò)的輸入是一張參考圖像(reference image)和一系列的源圖像(source image),每次計(jì)算一個(gè)參考圖像的深度圖,而不是立即計(jì)算整個(gè)三維場(chǎng)景,這樣的思路保證了大規(guī)模三維重建的可行性。
4289
駕駛哥 ??? 3年前
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)(2025-10-01) 
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)(2025-10-01)
206
吳永童 ??? 7月前
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)(2025-09-24) 
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)(2025-09-24)
221
吳永童 ??? 8月前
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)生成粗糙表面(2025-11-06) 
abaqus腳本插件104-基于空間點(diǎn)云坐標(biāo)重構(gòu)六面體網(wǎng)格節(jié)點(diǎn)生成粗糙表面(2025-11-06)
544
吳永童 ??? 6月前
基于CATIA的汽車零部件逆向設(shè)計(jì) 
當(dāng)下以三維激光掃描儀使用最為廣泛,逐漸取代了其他測(cè)量方式,它有著采集速度快,易操作,點(diǎn)云數(shù)據(jù)成型快等優(yōu)點(diǎn),通過對(duì)零部件進(jìn)行3D掃描,獲得精度可達(dá)0.02mm的完整三維點(diǎn)云數(shù)據(jù),如圖1。圖1 點(diǎn)云數(shù)據(jù) 測(cè)量完成的數(shù)據(jù)一般為asc碼或者stl碼等格式的數(shù)據(jù)文件,里面包含掃描部件的三維點(diǎn)云數(shù)據(jù)。
3329 2 1
CATIA助手 ??? 2年前
如何使用無人機(jī)進(jìn)行三維建模 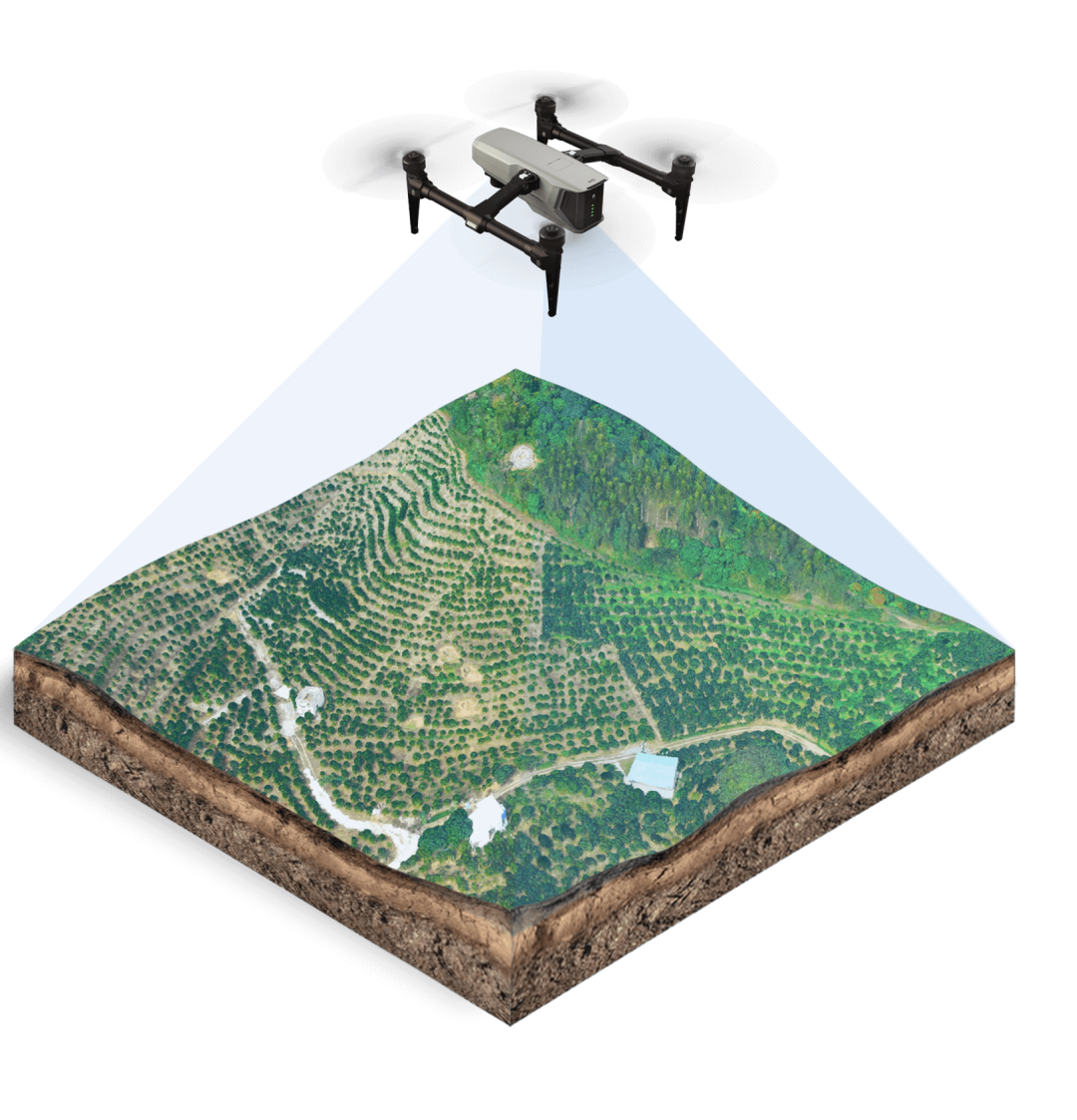
該方法的建模效率比傳統(tǒng)方法高效,且三維激光點(diǎn)云數(shù)據(jù)和無人機(jī)傾斜攝影數(shù)據(jù)的直觀性可降低建模過程中內(nèi)外業(yè)的出錯(cuò)率,避免了傳統(tǒng)方法對(duì)于建筑部件的局部數(shù)據(jù)缺失而返回現(xiàn)場(chǎng)補(bǔ)充量測(cè)數(shù)據(jù)的成本。同時(shí),三維激光點(diǎn)云數(shù)據(jù)與無人機(jī)傾斜攝影測(cè)量獲取的古建筑數(shù)據(jù)更加豐富且完整,是可存檔的原始三維空間模型數(shù)據(jù),可為科研人員進(jìn)行后續(xù)研究提供最原始的數(shù)據(jù)支撐。曲林等利用無人機(jī)影像建立實(shí)景三維模型。
7347 2 1
無人機(jī)圈 ??? 2年前
中國有完全自主的三維幾何建模引擎和幾何約束求解器嗎? 
DGM除了在國內(nèi)幾個(gè)重點(diǎn)CAE/BIM項(xiàng)目得到應(yīng)用驗(yàn)證外,主要用于構(gòu)建山東華云三維科技有限公司(華天軟件的全資子公司)的國內(nèi)首款、完全自主、基于云架構(gòu)的三維CAD平臺(tái)CrownCAD。DCS也是CrownCAD的草圖、裝配、運(yùn)動(dòng)仿真的基礎(chǔ)。官網(wǎng):華云三維 CrownCAD | 三維云CAD協(xié)同設(shè)計(jì)平臺(tái) 基于云架構(gòu)的三維CAD——CrownCAD。
3204 1
Jianhongwei810 ??? 3年前
cohesive單元模擬三維壓裂,裂縫形態(tài)張開為什么不是從我設(shè)置的注入點(diǎn)開始 
"><jsk id="C_Play100081fcd66c71f093e56632b68f0102" videoid="100081fcd66c71f093e56632b68f0102" duration="5秒"><img src="https://img.jishulink.com/static/web/youku-case.png"></jsk></div><p>用cohesive單元法模擬三維水力壓裂過程
1667
用戶_129582 ??? 5月前
實(shí)景三維,值得每一個(gè)測(cè)繪人重視的藍(lán)海 
就測(cè)繪行業(yè)內(nèi)而言,航空攝影測(cè)量、三維激光點(diǎn)云測(cè)量等新技術(shù)往往生產(chǎn)的依然是4D數(shù)據(jù);就社會(huì)層面而言,普通群眾對(duì)實(shí)景三維中國更是缺少概念。對(duì)此,郭仁忠表示,實(shí)景三維中國并不遙遠(yuǎn)。
2225
地質(zhì)GIS帝國 ??? 3年前
【產(chǎn)品發(fā)布】新一代云原生仿真平臺(tái)——格物云CAE強(qiáng)勢(shì)發(fā)布! 
格物云CAE流體力學(xué)模塊,基于有限體積方法求解納維-斯托克斯方程,可以處理二維、三維,穩(wěn)態(tài)或非穩(wěn)態(tài),層流或湍流,不可壓或微可壓流體,等溫或非等溫等多種計(jì)算問題,支持結(jié)構(gòu)化網(wǎng)格、非結(jié)構(gòu)化網(wǎng)格以及混合類型的網(wǎng)格和網(wǎng)格拼接、拉伸、周期性邊界、動(dòng)網(wǎng)格等多種前處理方法,可以涵蓋多種工業(yè)應(yīng)用物理模塊。
2309
CAE璐姐 ??? 2年前
巖體不連續(xù)提取工具---Discontinuity Set Extractor (DSE) 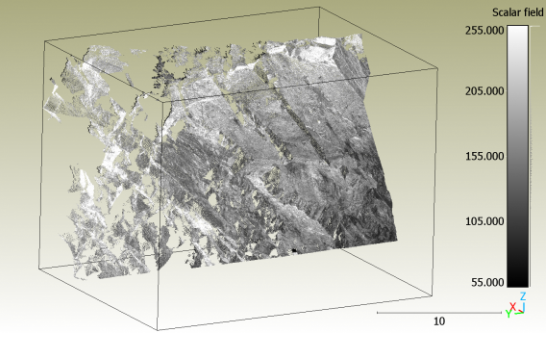
輸入的數(shù)據(jù)是三維點(diǎn)云,三維點(diǎn)云數(shù)據(jù)由三維激光掃描儀如LiDAR或TLS【地面激光掃描儀TLS在巖土工程中的應(yīng)用(2)---節(jié)理粗糙度JRC; 地面激光掃描儀(Terrestrial Laser Scanner)在巖土工程中的應(yīng)用(1)---Rockfall】產(chǎn)生,也可以由數(shù)字?jǐn)z影測(cè)量(digital photogrammetry)技術(shù)【攝影測(cè)量技術(shù)在巖石工程中的應(yīng)用(application of photogrammetry
3737 1 1
計(jì)算巖土力學(xué) ??? 3年前
20條/頁 
 97
97 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
