



米思米大寰機器人代理店-末端執行器工業采購平臺推薦 
國內電動末端執行器銷量第一,累計交付超20萬套,客戶包括800多家企業,覆蓋50多個行業。更多大寰機器人的產品歡迎進入米思米官網搜索“品牌代理店”或點擊大寰機器人代理店頁面進行了解。
2340
自動化工業零件 ??? 3月前
Ansys Zemax光學設計軟件技術教程:如何使用ZPL創建用戶自定義求解 
發生這種情況時,應用于物體2的“Z位置”ZPL求解將自動更改,以根據對應操作將此物體始終放置在CPC物體末端的10毫米后。技巧和陷阱宏求解非常普遍,幾乎可以使用任何計算來確定求解值。ZPL支持的所有函數和關鍵字均可用。從宏菜單執行或作為求解執行的ZPL宏之間沒有區別。但是,編寫ZPL求解時應認真仔細: 許多ZPL關鍵字和某些函數不應在宏求解中使用。
3093 3
w**elab86_Swsp ??? 3年前
Ansys Zemax | 如何使用 ZPL 創建用戶自定義求解 
發生這種情況時,應用于物體2的 “Z 位置” ZPL 求解將自動更改,以根據對應操作將此物體始終放置在 CPC 物體末端的10毫米后。 技巧和陷阱宏求解非常普遍,幾乎可以使用任何計算來確定求解值。ZPL 支持的所有函數和關鍵字均可用。從宏菜單執行或作為求解執行的 ZPL 宏之間沒有區別。
2495
宇熠科技 ??? 6月前
傳統測試設備的局限與協作機械臂的破局 
它本質上是一個可自由編程、具備感知能力的“萬能操作手”,通過更換末端執行器(EOAT)和集成不同的測控儀器,它可以執行多種多樣的測試任務,將測試設備從“固定工裝”升級為“柔性工作站”。二、 協作機械臂構成的核心測試單元與能力一個以協作機械臂為核心的智能測試系統,通常由以下幾部分構成:1.協作機械臂本體:作為執行機構,負責移動、定位和操作。
2819 1 1
德基西瓜 ??? 7月前
ZEMAX | 如何創建簡單的非序列系統 
偏心的原因是因為源細絲的旋轉軸不在對象的中心,而是在末端。要使源在 X 軸居中居中,請在“X 位置”列中輸入 -10。更新布局,它現在將顯示所需的燈絲位置和方向。放置探測器下一步是將探測器物體放置在距光源一定距離處的位置,以研究該位置的輻照度分布。將對象 3 更改為檢測器矩形,然后輸入以下參數。
3372
宇熠科技 ??? 3年前
漏電保護器知識大全 值得收藏 
漏電保護器主要由三部分組成:檢測元件、中間放大環節、操作執行機構。①檢測元件。由零序互感器組成, 檢測漏電電流,并發出信號。②放大環節。將微弱的漏電信號放大,按裝置不同(放大部件可采用機械裝置或電子裝 置),構成電磁式保護器相電子式保護器。③執行機構。收到信號后,主開關由閉合位置轉換到斷開位置,從而切斷電 源,是被保護電路脫離電網的跳閘部件。3.漏電保護器的工作原理是什么?
2292
電力講壇 ??? 3年前
RecurDyn機器人仿真應用及核心技術路線詳解 
評估系統的振動特性,對比剛體模型與柔體模型末端執行器的加速度曲線。
2381 1
杭州擬創(RecurDyn原廠) ??? 4月前
提升閥是否支持軟件更新?如何操作? 
執行升級:如果檢測到新版本,點擊“固件更新”或“下載”按鈕,系統會自動擦除舊數據并寫入新固件,此過程通常需要幾十秒,期間嚴禁斷電。復位與驗證:更新完成后,重啟閥門電源,再次讀取版本號以確認升級成功。
974
埃邁諾冠氣動器材(上海)有限公司 ??? 1月前
番木瓜摘取的接觸力學模型構建與試驗 附接觸力學文檔下載 
目前國內外尚無番木瓜自動化采收裝備,國內小型果園主要借助梯子或長柄簡易采收器采收,國外大型果園主要利用拖拉機驅動升降平臺及輸送裝置,以提高人工摘取高度和效率。研制開發番木瓜自動化摘取裝備有利于減輕人工勞動量,緩解當前中國農村勞動力不足問題。番木瓜體積和質量大、硬度低,相對振動采收,采用機器人摘取方案更為適宜。末端執行機構直接與果實接觸,是采摘機器人將果實與果梗分離獲取果實的關鍵執行部件。
2282
小小酥1 ??? 3年前
大寰機器人代理店-米思米精選直線運動零件-模組/單軸機器人 
提供直線運動零件,機器人部件,模組/單軸機器人,末端執行器等多種高端產品,商品源頭可溯,質量放心,服務全程保障.更多大寰機器人的產品歡迎進入米思米官網搜索“品牌代理店”了解或者直接訪問大寰機器人代理店頁面。大寰機器人是國內電動末端執行器領域的絕對領軍者,技術實力和市場地位都相當硬核。
2140
自動化工業零件 ??? 3月前
Moldex3D模流分析之黏彈性分析模組 
在執行黏彈性分析前,請確認是否選擇適合的材料。2.在計算參數的充填/保壓 (Flow/Pack) 標簽中,求解器類型須選擇為Enhanced-P。3.在計算參數的黏彈性/光學 (VE/Optics) 標簽中,應選擇殘留應力的選項以執行殘留應力分析 (下圖)。
2194
Moldex3D 中國 ??? 2年前
MBSE建模學習之五:交互和序列圖 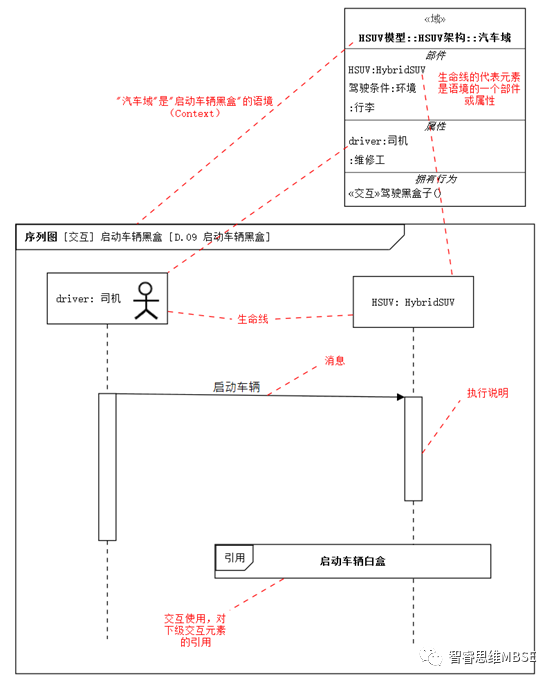
“ps:推進子系統”執行“點火”的執行說明有一個時間范圍約束,規定點火的持續時間(從開始到結束)應滿足“2~5分鐘”。這時候衛星經過加速后進入一個橢圓的軌道。此時,最外層并行組合片段的上半部分過程一直在重新計算和更新當前軌道半徑。
2454
一起學MBSE ??? 2年前
Ansys Lumerical | FDTD 應用:設計光柵耦合器 
CML 編譯器的參數提取 本節介紹如何使用腳本文件自動提取和保存光柵耦合器的 S 參數。我們假設光柵耦合器已經優化,因此僅執行原始工作流程的第3步概述部分是必要的。此步驟中生成的 S 參數文件可以直接在 CML 編譯器中使用,為光柵耦合器創建緊湊模型。
2492 2
宇熠科技 ??? 3年前
RP Fiber Power V8 版本功能更新說明 
下面是其中一個表格的開頭,你可以定義多達10個不同能量、時間形狀、波長等的輸入脈沖: 表格的下一部分用于定義最多五個放大器級: 同一表單的末尾提供了許多可配置的圖表: RP Fiber Power 現已更新至 V8 最新版本,我們已經更新了更多的 Power Forms!歡迎評論留言聯系工作人員,了解更多詳情。
1853 3
墨光科技 ??? 2年前
ZEMAX軟件技術應用教程專題:如何創建復雜的非序列物體 
在導光管末端放置光闌為了在導光管末端放置一個圓形光闌,我們需要將兩個面嵌套在一起,一個是矩形體的表面(作為阻擋光闌)以及一個圓形孔徑(設置為空氣)。
2437
w**elab86_Swsp ??? 3年前
如何在 Python PyCharm 中執行調試? 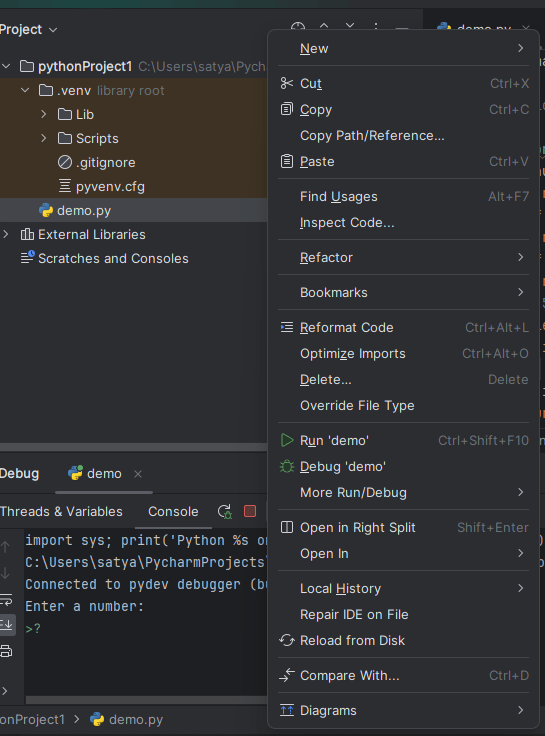
Step Over (F8):執行當前代碼行并移動到下一行。如果當前行包含函數調用,它將執行整個函數,并在函數調用后的下一行暫停。 Step Into (F7):將調試器移動到函數調用中,允許您逐行單步執行函數的代碼。 跳出 (Shift+F8):執行當前函數的剩余行并返回到被調用的函數。
4141 29 19
仿真資料吧 ??? 1年前
版本更新 | 2022 OrCAD 17.4 版本更新——十大亮點 
設置電源網絡(Set power nets.) 7?CM規則管理器的集成在Orcad 中設置基礎規則,可以同步到設計工具中 8?原理圖DRC更新 增強的設計檢查功能添加新的選項-“在線DRC(Onine DRC)”,如果用戶選擇檢查某一項檢查項目,可以將對應項設置為“ON”。
4024
圖元TOPBRAIN ??? 3年前
MoldFlow 2023已發布-附更新說明 
同樣,在新版本中執行的分析也無法在早期版本中進行查看。此限制不適用于3D 微芯片封裝分析。CAD 支持的平臺更新還支持以下 CAD 文件格式。
4529
王毅 ??? 3年前
《基于 ABAQUS 的桁架機器人模態分析》 
觀察圖 6 可知,在大多數固有頻率作用下,桁 架機器人的末端執行器振動都比較明顯,而末端執 行器正是桁架機器人在整個運輸碼垛工作過程中 最為關鍵的部件。若是桁架機器人出現了共振的現 象,末端執行器的變化會非常大。
3087 2
CAEer吳皓 ??? 2年前
matlab robotic toolbox工具坐標系下的雅可比矩陣 
*U(1,4); U(3,1); U(3,2); U(3,3)]; U = T{i}*U;end%Jn 關節速度映射到世界坐標系下末端執行器空間速度,幾何雅可比Jn=subs(Jn,[cos(alp1),sin(alp1),cos(alp4),sin(alp4),cos(alp5
2648
余俊煒 ??? 3年前
20條/頁 
 31
31 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
