



設計仿真 | Marc 后處理中的單位制應用 
全局后處理變量單位顯示此外,距離、角度、顯示節點、顯示點、顯示曲線、最小接觸體單元邊長、結果→特殊→工具→顯示節點命令,以及工具→計算菜單下的所有命令,如今都會在對話框區域顯示單位信息。小結新版本的Marc軟件實現了前處理和后處理的全單位顯示,這位用戶提供了極大的便利。從前處理建模時的參數定義,到后處理云圖、曲線、表格的數據輸出,單位信息全程精準跟隨、實時呈現。
2206
海克斯康設計與仿真 ??? 3月前
案例 | 使用Adams-Marc聯合仿真模擬車輛的極端負載工況 
測量柱樁物理測試后的底部刮痕 結果與驗證 總體而言,通過與物理測試的測量結果做比較,Adams-Marc 聯合仿真結果令人印象深刻。下圖中,紅色曲線表示接觸力在 Z 方向上的物理測量值。淺藍色曲線由沒有做任何模型調整的首次聯合仿真得出,仿真和測試之間峰值載荷的較大差異是由于仿真工程師提供了錯誤的 Y 坐標。
2733
Cruise ??? 3年前
巧用千尋位置GNSS軟件|點測量采集技巧 
點測量是測量中重要的節點,在測量工作的信息處理分析中發揮著重要作用。本期將給各位帶來使用千尋位置GNSS軟件采集地形點、控制點、快速點、連續點、房角點和傾斜點的操作技巧。 地形點地形點的設置如圖 5.1-9所 示,每次采集一個點,該點需要滿足存儲條件。
2411
千尋位置行業應用 ??? 3年前
工程測量—建筑物施工放樣的方法 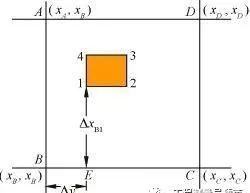
側方交會前方交會法:從已知點上求待定點的坐標,已知A、B兩點坐標,測夾角α和β就可以求得P 點坐標。前方交會后方交會:在未知點 P 設站,測定至少兩個夾角(即至少已知三點) 。后方交會六、 自由設站:類似后方交會與邊長交會,在未知點測定角度和距離定位的方法,自由設站的數據處理一般需要多余觀測,采用最小二乘法處理。文章來源:測繪人的筆記
3223
繪夢流光 ??? 3年前
全站儀測量道路工程橫斷面 
測站點到該橫斷面線上最近的特征點的距離要大于全站儀測距要求的最小有效距離(一般約為3米),小于這個距離儀器將不能測距。 放樣后將A、B點對應的樁號、偏距和實測高程記錄下來,如下圖: 步驟2,將儀器的視線鎖定在橫斷面線上 在A、B兩點中選取合適的點架設全站儀,另一個點就作為后視點。
4496 1 1
繪夢流光 ??? 3年前
OptiSystem 應用:激光雷達系統設計 
圖2測距儀(TofF)布局2)應用案例?下面的示例中,一個高斯脈沖(峰值脈沖時間= 1 us) 傳輸過后從虛擬目標反射(由自由空間信道模型 (擴展目標)定義)) 。經過衰減和延遲后,通過Cpp組件恒比定時測量法檢測和后處理接收到的信號。?接收到的脈沖是在抽樣時間6.02e-06秒觸發的,進而發現該范圍為751.27 m(與全局參數范圍設置為750 m相比較)。
2266
追光ing ??? 8月前
[Optiwave] OptiSystem應用:激光雷達系統設計 ![[Optiwave] OptiSystem應用:激光雷達系統設計](https://img.jishulink.com/msimage/202509/d1f6261cd27efd5a2ea6acf7c034df32.png?image_process=resize,fw_294,fh_172,)
圖2.測距儀(TofF)布局 2)應用案例 □ 下面的示例中,一個高斯脈沖(峰值脈沖時間= 1 us) 傳輸過后從虛擬目標反射(由自由空間信道模型 (擴展目標)定義) ) 。經過衰減和延遲后,通過Cpp組件恒比定時測量法檢測和后處理接收到的信號。
2378
信光嗎 ??? 8月前
基于點云的球銑加工動態仿真 
如圖1所示,將兩刃的6 mm球頭銑刀建模為一個半徑為3 mm的半球,在每個仿真步進后距離球心小于半徑R的點P將被切削,同時銑刀球面上生成新的P',即將點云模型中P點重置為P'位置,同時P'的法線設置為指向銑刀球面球心。
4054 5
數控編程網 ??? 2年前
OptiSystem應用:激光雷達系統設計 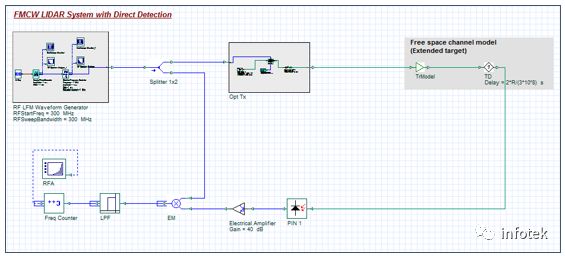
圖2.測距儀(TofF)布局應用案例 下面的示例中,一個高斯脈沖(峰值脈沖時間= 1 us) 傳輸過后從虛擬目標反射(由自由空間信道模型 (擴展目標)定義) ) 。經過衰減和延遲后,通過Cpp組件恒比定時測量法檢測和后處理接收到的信號。 接收到的脈沖是在抽樣時間6.02e-06秒觸發的,進而發現該范圍為751.27 m(與全局參數范圍設置為750 m相比較)。
2264
追光ing ??? 1年前
OptiSystem應用:激光雷達系統設計 
圖2.測距儀(TofF)布局 應用案例 下面的示例中,一個高斯脈沖(峰值脈沖時間= 1 us) 傳輸過后從虛擬目標反射(由自由空間信道模型 (擴展目標)定義) ) 。經過衰減和延遲后,通過Cpp組件恒比定時測量法檢測和后處理接收到的信號。 接收到的脈沖是在抽樣時間6.02e-06秒觸發的,進而發現該范圍為751.27 m(與全局參數范圍設置為750 m相比較)。
2337
追光ing ??? 2年前
案例 | Adams-Marc聯合仿真幫助三星獲得設計見解 
Adams-Marc聯合仿真 我們運用Adams-Marc聯合仿真功能,將幾何和材料非線性結構行為包括在多體動力學(MBD)仿真中。任何Adams模型和Marc模型都可以與該工具一起使用。后處理是分開進行的,Adams結果在Adams的后處理器中完成,Marc結果在Marc的后處理器中完成。MBD解決方案(如Adams)和非線性FEA模型(如Marc)之間的聯合仿真提供了許多優勢。
2379
Cruise ??? 3年前
基于ADAMS的點按手法運動仿真 
利用ADAMS中“measure”功能測量第3個關節角的變化。如圖6所示。圖6中,縱坐標是由初始位置轉過的角度。將圖6所示的曲線導入ADAMS后處理模塊中,得到曲線上的關節角的具體值。由于仿真42 s,步長為0.2 s,那么總共得到210個點。鑒于篇幅所限,在這里隨機選擇其中的幾個點的值列于表2中。
3010 2
擺渡人張 ??? 2年前
視覺測量中的折光問題 
本文將詳細闡述視覺測量中折光現象。2. 大氣折光現象基于視覺的測量方法都需要利用感光傳感器獲取物體反射或輻射出來的光,然后利用圖像處理方法獲得測量對象的位移。物體反射或輻射出來的光在均勻介質中的傳播是一條直線,但是當介質不均勻的時候,光的傳播路線不再是一條直線。在太陽高度角的變化過程中,地面和空氣中的溫度會呈現大致周期的變化,且空氣的溫度與距離地面的高度具有一定相關性。
2444 2 1
文化人不大聰明 ??? 4年前
激光跟蹤儀SpatialMaster測量軟件 
開放測量接口:以提供更好的服務SMT軟件開放測量接口和軟件服務,任何第三方都可以通過SMT提供的測量通信接口來接入SMT軟件,進行測量后的分析處理。SMT作為大尺寸測量分析軟件,與中圖儀器自主研發的激光跟蹤儀配套使用,堪稱黃金搭檔。
2548
深圳市中圖儀器股份有限公司 ??? 3年前
數字兩機丨中國航發長春控制:淺談航空發動機零部件數字化檢測技術 
在檢測路徑符合相關標準后,就可以發布檢測路徑。 2.2 代碼編譯和后處理 在創建完檢測路徑后,需要把路徑代碼編譯成通用的測量機編程語言,以增強測量的適用性,以防測量機編程語言與測量機出現不匹配的問題。 2.3 三維檢測報告發布 為增強檢測結果的可讀性,需要發布檢測三維報告。
4184 4 1
Space ONE ??? 2年前
【干貨】水利工程中的大壩施工測量 
通常情況下,中小型大壩的壩軸線由工程設計人員根據地形和地質情況,經過多方比較,直接在現場選定軸線兩端點的位置。而大型土壩則需要經過嚴格的現場勘測與規劃、多方比較與研究后才能進行壩軸線定位。最重要的是軸線兩端點定位后必須用永久性標志標明,并且需要沿軸線方向設立軸線控制樁,以便檢查。
3377
水中的魚 ??? 3年前
設計仿真 | Adams-Marc聯合仿真助力萊頓汽車集團提升仿真計算效率 
在扭矩調制器的殼體和彈簧之間建立了六個接觸點,Adams使用這些接觸點向Marc提供位移數據,Marc使用這些接觸點將力提供給Adams。在這個仿真流程中,使用Adams-Marc聯合仿真分析扭矩調制器僅花費了兩個小時,這是Marc單獨仿真所需時間的1/15。
2301 1
海克斯康設計與仿真 ??? 2年前
Ansys Workbench 估計圓柱面受力變形后的圓柱度 
matlab評估圓柱度大致過程為,根據圓柱面節點,確定中心軸線,測量每個節點到中心軸線的距離,獲得最大、最小距離差,即為圓柱度。
2923 12 6
cae_lizh ??? 1年前
UWB測距的遮蔽區界址點空地組網定位研究 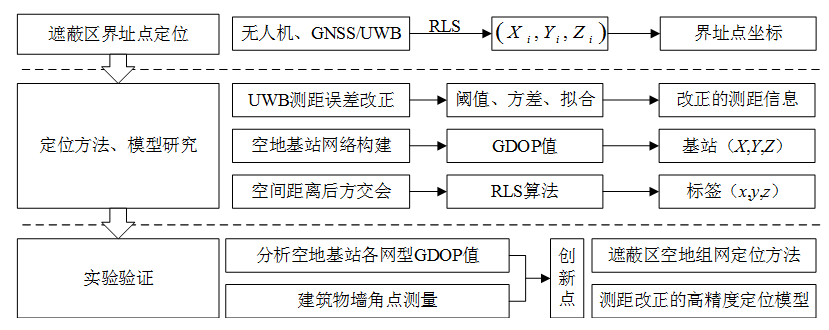
與全站儀測量位置相比,經過UWB測距誤差擬合改正后,A點定位精度提高了49%,B點定位精度提高了55%,C點定位精度提高了54%,D點定位精度提高了52%。此外,A、D兩點的定位精度較高,C點的定位精度最低,這與測試點所處的半遮蔽、遮蔽環境相關。因此,在無人機網型確定后,提高UWB測距精度,可以提高半遮蔽區界址點定位精度。
3884
繪夢流光 ??? 3年前
巧用千尋位置GNSS軟件| 電力線勘測如何實現? 
(實物兩端測量順序任意,軟 件會按線路方向自動判斷實物的前后中斷面點,需要注意的是,必須先存儲 1 點,再存儲 2 點,軟件也自動處理,不用自己選擇。 E、3 點測房測量房屋時,有 1 點、2 點、3 點三種方法。
2122
千尋位置行業應用 ??? 3年前
20條/頁 
 204
204 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
