



典型液壓回路(四):方向控制回路 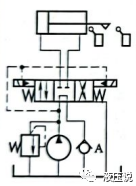
控制執(zhí)行元件的啟動、停止或改變運(yùn)動方向及控制液流通斷或改變方向均需采用方向控制回路。實(shí)現(xiàn)方向控制的基本方法有: 閥控,主要是采用方向控制閥分配液流; 泵控,是采用雙向定量泵或雙向變量泵改變液流的方向和流量; 執(zhí)行元件控制,是采用雙向液壓馬達(dá)來改變液流的方向。
4627 3
液壓那些事 ??? 2年前
典型液壓回路(二):同步控制回路 
02 流量控制同步回路 調(diào)速閥同步回路:圖中采用了四個(gè)單向閥組成的流量調(diào)整板,不管液壓缸的活塞伸出還是縮回,液流始終單方向流經(jīng)調(diào)速閥,下降時(shí)為回油節(jié)流調(diào)速。調(diào)節(jié)調(diào)速閥的開度可使兩液壓缸保持同步,同步精度一般可達(dá)5%~10%。
4265
液壓那些事 ??? 2年前
高壓比例閥的控制回路應(yīng)如何設(shè)計(jì)? 
答案通常不在于閥門本身,而在于控制回路的設(shè)計(jì),作為全球流體控制領(lǐng)域的領(lǐng)軍者,諾冠(IMI Norgren)憑借數(shù)十年的高壓應(yīng)用經(jīng)驗(yàn),為您揭示高壓比例閥控制回路設(shè)計(jì)的關(guān)鍵要素。
1744
埃邁諾冠氣動器材(上海)有限公司 ??? 2月前
電氣控制柜二次回路布線工藝圖解 
二次回路是任何電氣設(shè)備必不可少的重要組成部分,二次回路的電氣性能好壞直接影響到整臺電氣設(shè)備的性能和可靠性、安全性。同時(shí),其二次元件的裝配、標(biāo)號,導(dǎo)線的選擇、敷設(shè)以及排列組合等項(xiàng)目,構(gòu)成二次回路布線工藝的重要內(nèi)容。
1816
機(jī)電安裝 ??? 4年前
機(jī)器人方向控制中應(yīng)用的磁阻角度傳感芯片 
差動驅(qū)動原理:差動驅(qū)動是指左右兩個(gè)驅(qū)動輪分別由一個(gè)電機(jī)驅(qū)動,通過控制兩個(gè)驅(qū)動輪的運(yùn)動速度和方向實(shí)現(xiàn)機(jī)器人的轉(zhuǎn)向。左右輪速度的不同可以使機(jī)器人產(chǎn)生旋轉(zhuǎn)運(yùn)動。舵輪/轉(zhuǎn)向齒輪原理:機(jī)器人通過操控一個(gè)或多個(gè)舵輪(也稱轉(zhuǎn)向齒輪)的方向和轉(zhuǎn)速來實(shí)現(xiàn)轉(zhuǎn)向。舵輪通常位于機(jī)器人的前部或后部,當(dāng)舵輪旋轉(zhuǎn)時(shí),機(jī)器人就會圍繞輪子的軸線旋轉(zhuǎn)。傳感器測量磁鐵磁場方位角時(shí)可以達(dá)到小于0.07度的分辨率。
1970
如果我年少有為 ??? 2年前
48種常用液壓系統(tǒng)回路介紹 
流量閥、整流器雙向同步、變量同步馬達(dá)控制、電液比例方向閥同步控制)、順序回路(壓力順序閥、壓力繼電器電磁閥、機(jī)械換向閥、快-慢-快、優(yōu)先閥)、補(bǔ)油回路、滑閥機(jī)能回路、變量泵系統(tǒng)、壓機(jī)同步控制、彎板機(jī)同步控制。
3917
液壓那些事 ??? 3年前
當(dāng)電梯遇上PLC,一切控制就變的很簡單! 
所以召喚回路與電梯的運(yùn)行方向以及是否直駛密切相關(guān),為此在召喚回路中加入了反映直駛和方向監(jiān)視的繼電器M1和M2。(3)選向回路選向回路的作用,是根據(jù)目前電梯的位置和指令、召喚的情況,決定電梯的運(yùn)行方向,是向上或是向下。電梯方向的選擇,實(shí)際就是將指令和召喚的位置與電梯實(shí)際位置相比較,若前者在上(位置的上下)電梯則選擇向上,相反則選擇向下。
6372
技成電工課堂 ??? 3年前
AMESim液壓系統(tǒng)仿真軟件在液壓鎖緊回路教學(xué)中的應(yīng)用 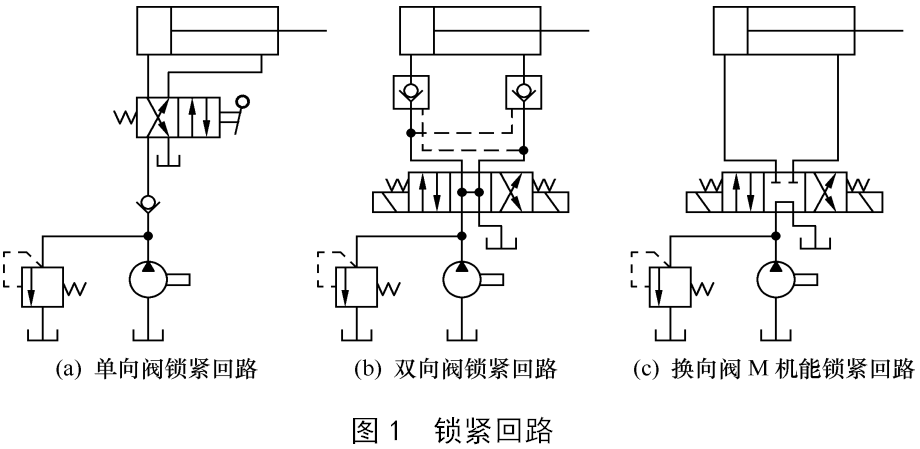
圖1(b)采用兩個(gè)液控單向閥組成聯(lián)鎖回路,可以實(shí)現(xiàn)活塞在任意位置上的鎖緊。此回路鎖緊精度高,設(shè)計(jì)中應(yīng)用本回路時(shí),為了保證可靠鎖緊,其換向閥一般采用H型或Y型。換向閥在工作過程中的控制信號以及經(jīng)過兩個(gè)液控單向閥的控制液壓缸的有桿腔和無桿腔的流量變化可通過仿真軟件觀察得到。
2885 1
技術(shù)哥 ??? 3年前
變電站典型二次回路圖解 
①在后臺機(jī)上使用監(jiān)控軟件對斷路器進(jìn)行操作時(shí),操作指令通過網(wǎng)絡(luò)觸發(fā)微機(jī)測控里的控制回路,控制回路發(fā)出的對應(yīng)指令通過控制電纜到達(dá)微機(jī)保護(hù)里的操作箱,操作箱對這些指令進(jìn)行處理后通過控制電纜發(fā)送到斷路器機(jī)構(gòu)的控制回路,最終完成操作。動作流程為:微機(jī)測控——操作箱——斷路器。
2794
電工電氣論壇 ??? 3年前
變電站典型二次回路圖解! 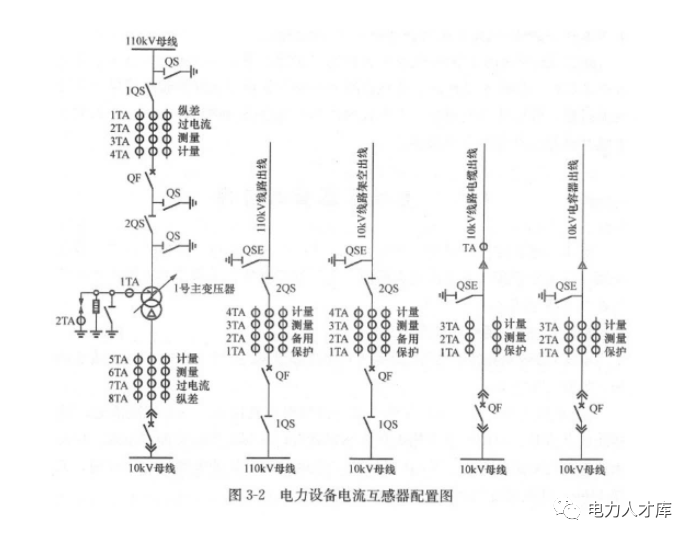
①在后臺機(jī)上使用監(jiān)控軟件對斷路器進(jìn)行操作時(shí),操作指令通過網(wǎng)絡(luò)觸發(fā)微機(jī)測控里的控制回路,控制回路發(fā)出的對應(yīng)指令通過控制電纜到達(dá)微機(jī)保護(hù)里的操作箱,操作箱對這些指令進(jìn)行處理后通過控制電纜發(fā)送到斷路器機(jī)構(gòu)的控制回路,最終完成操作。動作流程為:微機(jī)測控——操作箱——斷路器。
2678 1
電氣分享社區(qū) ??? 3年前
電氣一、二次回路你弄清楚了嗎? 
它主要起著轉(zhuǎn)換電壓、輸送電能、分配電能的作用,相對于二次回路來講,它的電壓高、電流大。二次回路,又稱控制電路、二次接線、二次系統(tǒng)等。它主要由二次設(shè)備組成,包括各種繼電器、測量儀表、計(jì)量表計(jì)、控制開關(guān)、操作電源、控制電纜及控制小母線等。它主要起著監(jiān)視、測量、控制、保護(hù)及發(fā)出各種信號的作用。如果一次系統(tǒng)為低壓 (如交流380V),這種二次設(shè)備又稱為輔助設(shè)備。
3317
電工電力論壇 ??? 4年前
干貨|控制閥“死區(qū)”的分析 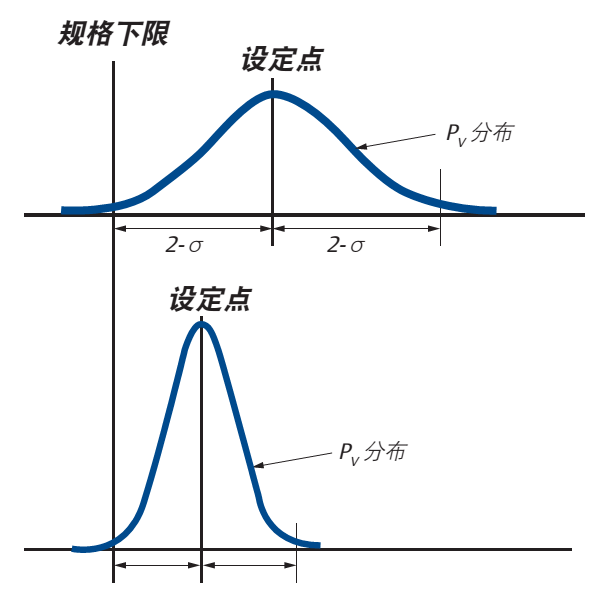
由于各種各樣的原因,如摩擦力、空程、閥軸扭轉(zhuǎn)、放大器或滑閥的死區(qū)等,控制閥是一個(gè)儀表回路里死區(qū)的主要來源。死區(qū)是一種常見現(xiàn)象,指的是當(dāng)輸入信號改變方向時(shí),不能使得被測過程變量產(chǎn)生變化的控制器輸出值的范圍或?qū)挾取.?dāng)一個(gè)負(fù)載擾動發(fā)生時(shí),過程變量會偏離設(shè)定點(diǎn)。這個(gè)偏差會通過控制器產(chǎn)生一個(gè)糾正性動作,并回復(fù)到過程中。然而,控制器輸出的一個(gè)初始變化可能不會產(chǎn)生一個(gè)相應(yīng)的過程變量的糾正性的改變。
2643
全球閥門網(wǎng) ??? 3年前
液壓比例閥的選用原則 
電液比例壓力控制閥可用于:帶鋼熱連軋機(jī)卷取機(jī)液壓輔助系統(tǒng)的電液比例壓力控制回路,板帶軋機(jī)輥縫控制的液壓推上系統(tǒng)電液比例壓力控制回路,帶材卷取設(shè)備恒張力的閉環(huán)電液比例壓力控制回路。電液比例流量控制回路可用于:帶鋼熱連軋機(jī)精軋機(jī)平衡液壓系統(tǒng)的電液比例壓力控制回路,機(jī)床微進(jìn)給的電液比例控制回路,用于旋壓機(jī)、折板機(jī)同步的電液比例控制回路,電梯的電液比例控制回路等。
3003 2
液壓那些事 ??? 3年前
講一講什么是電氣抱閘,如何控制? 
現(xiàn)在在一些關(guān)鍵場合,例如抱閘不參與控制設(shè)備運(yùn)行,而是起安全保障作用的時(shí)候,嘗試著將抱閘脫離變頻器甚至PLC的控制直接做獨(dú)立繼電器控制回路來控制。但一般場合,如起重等行業(yè)用變頻器本身的邏輯控制功能還是挺實(shí)用的。實(shí)際項(xiàng)目中,抱閘分為常閉和常開兩種,除了向吊車,起重機(jī)等特殊場合是常閉的(不工作時(shí)抱閘處于抱緊狀態(tài)),一般我們的應(yīng)用的都是常開的,即抱閘回路接通時(shí)抱緊。
2556
電力講壇 ??? 4年前
【電氣知識】60個(gè)知識點(diǎn)讓你秒懂電機(jī)與電氣控制技術(shù)! 
57、起動、自保控制電路的工作原理 按下SB2,KM1線圈得電,KM吸合,主觸電接通電機(jī)電源,電機(jī)運(yùn)行;同時(shí)輔助觸點(diǎn)閉合,接通控制回路,并保持。松開SB2,由于輔助觸點(diǎn)已經(jīng)閉合了控制回路,靠輔助觸點(diǎn)繼續(xù)接通控制回路,電機(jī)繼續(xù)運(yùn)行。
2468
機(jī)械工程師 ??? 4年前
講一講什么是電氣抱閘,如何控制? 
現(xiàn)在在一些關(guān)鍵場合,例如抱閘不參與控制設(shè)備運(yùn)行,而是起安全保障作用的時(shí)候,嘗試著將抱閘脫離變頻器甚至PLC的控制直接做獨(dú)立繼電器控制回路來控制。但一般場合,如起重等行業(yè)用變頻器本身的邏輯控制功能還是挺實(shí)用的。實(shí)際項(xiàng)目中,抱閘分為常閉和常開兩種,除了向吊車,起重機(jī)等特殊場合是常閉的(不工作時(shí)抱閘處于抱緊狀態(tài)),一般我們的應(yīng)用的都是常開的,即抱閘回路接通時(shí)抱緊。
2379
電氣圈 ??? 4年前
電氣自鎖互鎖電路原理圖解釋_看自鎖和互鎖的控制線接法 
有很多地方需要電機(jī)的正轉(zhuǎn)和反轉(zhuǎn)運(yùn)行,比如大門的開啟和關(guān)閉就是電動機(jī)的下轉(zhuǎn)和反轉(zhuǎn)控制的,電機(jī)的正轉(zhuǎn)和反轉(zhuǎn)是靠對電源的相序進(jìn)行倒相實(shí)現(xiàn)的,正轉(zhuǎn)運(yùn)行的時(shí)候,反轉(zhuǎn)投入運(yùn)行就會造成相間的短路,燒壞電氣設(shè)備,這了避免這種情況的發(fā)生,在正轉(zhuǎn)的時(shí)候?qū)⒔涣鹘佑|器的輔助常閉觸點(diǎn)串連在電機(jī)反轉(zhuǎn)的控制回路中,將反轉(zhuǎn)交流接觸器的輔助觸點(diǎn)串連在電機(jī)下轉(zhuǎn)的控制回路里面,當(dāng)電機(jī)正轉(zhuǎn)的時(shí)候用交流接觸器的常閉輔助觸點(diǎn)切斷反轉(zhuǎn)電機(jī)的控制回路
3462
電工學(xué)習(xí)一點(diǎn)通 ??? 3年前
AMEsim液壓鎖:幾種液壓鎖緊回路動態(tài)特性仿真分析 
控制液壓泵的電機(jī)轉(zhuǎn)速為 1 500 r / min,液壓缸活塞桿長度設(shè)為 1 m,所連接質(zhì)量塊的質(zhì)量為 100 kg, 控制換向閥開啟的分段線性信號分別設(shè)置為: 換向閥鎖緊回路中, 在 t=0~3s 內(nèi)為常量 1, 換向閥處于左位, 液壓缸活塞桿推動質(zhì)量塊運(yùn)動,在t=3~5 s 內(nèi)為常量0, 換向閥處于中位, 活塞桿停止運(yùn)動并保持原位; 單向順序閥和液控單向閥鎖緊回路, 在t=0~3s 內(nèi)為常量-1
2709 1
技術(shù)哥 ??? 3年前
60個(gè)知識點(diǎn)讓你秒懂電機(jī)與電氣控制技術(shù)! 
松開SB2,由于輔助觸點(diǎn)已經(jīng)閉合了控制回路,靠輔助觸點(diǎn)繼續(xù)接通控制回路,電機(jī)繼續(xù)運(yùn)行。按下SB1,KM1斷電,輔助觸點(diǎn)斷開,主觸點(diǎn)斷開電機(jī)電源,電機(jī)慢慢停止轉(zhuǎn)動。
2141
電力講壇 ??? 4年前
電氣二次回路看圖口訣,值得收藏! 
二次回路主要是指對一次設(shè)備的工況進(jìn)行監(jiān)測、控制、調(diào)節(jié)、保護(hù)的二次設(shè)備,按照一定的要求連接在一起構(gòu)成電路,稱之為二次回路。描述二次回路的圖紙稱為二次回路圖。二次回路一般包括:控制回路、信號回路、測量回路、自動裝置回路等。由于二次回路圖的邏輯性很強(qiáng),并且是按一定規(guī)律繪制,故看圖時(shí)要抓住此規(guī)律才能比較容易看懂。
2123
電力講壇 ??? 3年前
20條/頁 
 192
192 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
