



基于SolidWorks的自動(dòng)裝卸機(jī)械結(jié)構(gòu)設(shè)計(jì) 
摘 要:機(jī)械手是能夠?qū)崿F(xiàn)自動(dòng)化定位控制的多功能機(jī)器,在國(guó)內(nèi)外工業(yè)自動(dòng)化控制領(lǐng)域中占據(jù)主要地位。使用模塊化和優(yōu)化設(shè)計(jì) 理論實(shí)現(xiàn)自動(dòng)裝卸機(jī)械結(jié)構(gòu)的設(shè)計(jì),利用 ANSYS 軟件進(jìn)行校核,使用 SolidWorks 軟件實(shí)現(xiàn)運(yùn)動(dòng)過(guò)程仿真。仿真結(jié)果表明,該設(shè)計(jì)能 夠滿足機(jī)械運(yùn)動(dòng)需求,可降低裝卸成本,提高裝卸工作效率。
4672 5
太極元?dú)?/span> ??? 2年前
基于ANSYS的工程結(jié)構(gòu)抗震分析全過(guò)程(含全部程序+使用教程) 
(4)計(jì)算加速度響應(yīng)對(duì)速度時(shí)程繼續(xù)求導(dǎo),獲得加速度時(shí)程(AX、AY、AZ),用于進(jìn)一步評(píng)估結(jié)構(gòu)的地震響應(yīng)。7 計(jì)算結(jié)果分析圖5展示了結(jié)構(gòu)頂部在地震作用下三個(gè)方向的加速度響應(yīng)時(shí)程曲線。圖 5 結(jié)構(gòu)頂部加速度響應(yīng)自此,基于ANSYS的工程結(jié)構(gòu)抗震分析全過(guò)程結(jié)束,感興趣的小伙伴可以私信聯(lián)系。
4805 2
一只科研汪 ??? 11月前
Ansys攜手臺(tái)積電和微軟加速機(jī)械應(yīng)力仿真,基于云技術(shù)實(shí)現(xiàn)3D-IC可靠性 
Ansys Mechanical 基于Azure的專用HPC基礎(chǔ)架構(gòu)運(yùn)行,有助于在保持預(yù)測(cè)準(zhǔn)確性的同時(shí),擴(kuò)展計(jì)算要求嚴(yán)苛的應(yīng)力仿真。通過(guò)將高度復(fù)雜的熱-機(jī)械應(yīng)力仿真自動(dòng)化,Ansys Mechanical可以憑借高效的混合并行求解器仿真大量模型,利用按需云計(jì)算資源(如Azure),該求解器可實(shí)現(xiàn)經(jīng)濟(jì)高效的計(jì)算。
2788 1
Ansys中國(guó) ??? 2年前
基于Ansys Twin Builder連桿結(jié)構(gòu)數(shù)字孿生體建模關(guān)鍵技術(shù)及應(yīng)用 
圖1 連桿數(shù)字孿生體模型技術(shù)路線圖 二、連桿載荷識(shí)別1、載荷識(shí)別原理 在結(jié)構(gòu)線性響應(yīng)情況下,載荷與變形、變形與應(yīng)變均是線性關(guān)系,故可得載荷與應(yīng)變是線性關(guān)系,如圖2所示。True-Load軟件基于該性質(zhì)對(duì)線性響應(yīng)的結(jié)構(gòu)進(jìn)行載荷識(shí)別,如果整體結(jié)構(gòu)中存在局部非線性行為,如螺栓連接和焊縫區(qū)域局部塑形變形、結(jié)構(gòu)中存在橡膠件等,該載荷識(shí)別方法仍然適用。
2565 2
上海安世亞太 ??? 4年前
基于Ansys的船舶板架結(jié)構(gòu)強(qiáng)度分析 

基于Ansys的船舶板架結(jié)構(gòu)強(qiáng)度分析基于Ansys的船舶板架結(jié)構(gòu)強(qiáng)度分析(免費(fèi)) 【已結(jié)束】 直播時(shí)間:4月29日 19:30適用人群:有限元分析初學(xué)者,結(jié)構(gòu)設(shè)計(jì)工程師課程將以船舶行業(yè)開(kāi)始,引入船舶結(jié)構(gòu)強(qiáng)度的重要性,進(jìn)而闡述結(jié)構(gòu)強(qiáng)度的做法。希望通過(guò)本課程讓大家對(duì)結(jié)構(gòu)強(qiáng)度分析有一個(gè)概念,更好的利用有限元分析來(lái)優(yōu)化結(jié)構(gòu)設(shè)計(jì)。
6965 1
技術(shù)鄰直播 ??? 4年前
用戶作品賞析 | 基于Ansys/LS-DYNA框剪結(jié)構(gòu)爆破倒塌仿真分析 
基于Ansys/LS-DYNA框剪結(jié)構(gòu)爆破倒塌仿真分析 [ 摘 要 ] 不同切口方式與延期時(shí)差對(duì)建筑物拆除爆破倒塌效果有極大影響,尤其是對(duì)大高寬比的框架剪力墻結(jié)構(gòu)。因此,利用數(shù)值模擬對(duì)建筑物倒塌效果進(jìn)行仿真分析,對(duì)于爆破方案的優(yōu)化具有重要的指導(dǎo)意義。
4190 2
CAE聯(lián)盟新聞 ??? 4年前
基于ANSYS Workebench2025R2 凸輪結(jié)構(gòu)旋轉(zhuǎn)運(yùn)動(dòng) 
基于ANSYS Workebench2025R2 凸輪結(jié)構(gòu)旋轉(zhuǎn)運(yùn)動(dòng)結(jié)構(gòu)模型
1193
北緯35 ??? 2月前
基于Ansys Turbosystem的旋轉(zhuǎn)機(jī)械仿真專題培訓(xùn) 
TurboSystem系統(tǒng)介紹Ansys BladeModeler操作介紹Ansys TurboGrid操作介紹上機(jī)案例練習(xí)1Ansys CFX旋轉(zhuǎn)機(jī)械邊界條件設(shè)定Ansys CFX旋轉(zhuǎn)機(jī)械求解器設(shè)定Ansys CFX旋轉(zhuǎn)機(jī)械湍流模型介紹上機(jī)案例練習(xí)2第二天Ansys CFX旋轉(zhuǎn)機(jī)械傳熱模擬介紹Ansys CFX旋轉(zhuǎn)機(jī)械非定常計(jì)算介紹Ansys
1939
上海安世亞太 ??? 2年前
泵殼的穩(wěn)態(tài)熱-結(jié)構(gòu)耦合分析_基于ANSYSWorkbench的熱結(jié)構(gòu)耦合順序分析 
泵殼的穩(wěn)態(tài)熱-結(jié)構(gòu)耦合分析_基于ANSYSWorkbench的熱結(jié)構(gòu)耦合順序分析
北緯35 ??? 6年前
基于ANSYS Workbenhch2024r2 結(jié)構(gòu)變形后的靜力分析 
基于ANSYS Workbenhch2024r2 結(jié)構(gòu)變形后的靜力分析第一步靜力分析,靜力分析后的結(jié)果 靜力變形后模型導(dǎo)入下一步進(jìn)行靜力分析或者其他分析,拖入靜力分析,設(shè)置放大系數(shù),在B6點(diǎn)擊更新 導(dǎo)入后的力模型 插入邊界條件,靜力分析結(jié)果
1571 2
北緯35 ??? 8月前
基于ADAMS的助老起升裝置的運(yùn)動(dòng)學(xué)仿真分析 
董緒斌等研究 了老年人坐、臥姿態(tài),通過(guò) ANSYS 有限元技術(shù)完成了 助老床椅一體化的機(jī)械系統(tǒng)設(shè)計(jì),此設(shè)計(jì)雖然可以滿 足基本功能,但是未對(duì)機(jī)械結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì),設(shè)計(jì) 成本還有降低的可能性[3]。
2598 5
擺渡人張 ??? 2年前
基于ANSYS的汽車轉(zhuǎn)向節(jié)拓?fù)鋬?yōu)化仿真分析 
摘 要:本研究基于ANSYS軟件,針對(duì)汽車轉(zhuǎn)向節(jié)的拓?fù)?em>結(jié)構(gòu)優(yōu)化展開(kāi)了仿真分析。首先,針對(duì)不同的工藝約束,建立了多目標(biāo)拓?fù)鋬?yōu)化目標(biāo)函數(shù),通過(guò)比較不同拓?fù)鋬?yōu)化結(jié)果的區(qū)別和優(yōu)劣勢(shì),選取了最優(yōu)的拓?fù)鋬?yōu)化建模方法。隨后,根據(jù)拓?fù)鋬?yōu)化結(jié)果,建立了工程化結(jié)構(gòu)數(shù)模。
5615 8
汽車-小江 ??? 2年前
基于ANSYS workbench2023R1 熱結(jié)構(gòu)耦合隨機(jī)半橢圓裂紋 
基于ANSYS workbench2023R1 熱結(jié)構(gòu)耦合隨機(jī)半橢圓裂紋,只能支持順序耦合
北緯35 ??? 2年前
基于ANSYS Workbench下平面對(duì)稱結(jié)構(gòu)的求解應(yīng)用 
基于ANSYS Workbench下平面對(duì)稱結(jié)構(gòu)的求解應(yīng)用
263
寧博士CAE團(tuán)隊(duì) ??? 4年前
葉輪機(jī)械專題 | 高精度葉片雙向流固耦合的分析方法 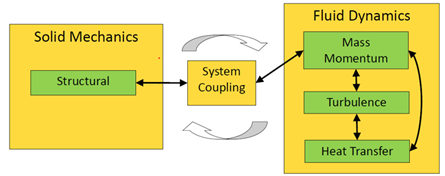
Ansys TurboGrid采用參數(shù)化網(wǎng)格生成模板技術(shù),針對(duì)軸流、離心、徑流等多種葉輪機(jī)械結(jié)構(gòu)自動(dòng)提供多種拓?fù)?em>結(jié)構(gòu),并可根據(jù)葉片扭曲程度自動(dòng)調(diào)整網(wǎng)格質(zhì)量。
4685
我愛(ài)汽輪機(jī)仿真 ??? 2年前
基于ANSYS T形結(jié)構(gòu)的熱應(yīng)力仿真分析計(jì)算 
基于ANSYS T形結(jié)構(gòu)的熱應(yīng)力仿真分析計(jì)算
1584 2
寧博士CAE團(tuán)隊(duì) ??? 4年前
基于ANSYS的承力結(jié)構(gòu)數(shù)字孿生體案例 
基于ANSYS的承力結(jié)構(gòu)數(shù)字孿生體案例
1370 1
仿真客 ??? 3年前
基于ANSYS Workbench Fluent的熱固結(jié)構(gòu)溫度場(chǎng)分布_無(wú)聲版 
基于ANSYS Workbench Fluent的熱固結(jié)構(gòu)溫度場(chǎng)分布
48 1
北緯35 ??? 6年前
ANSYS Workbench模擬齒輪箱變速器齒輪嚙合 
</p><p>ANSYS Workbench作為一個(gè)先進(jìn)的仿真平臺(tái),具備分析和模擬復(fù)雜機(jī)械系統(tǒng)的能力。它涵蓋了結(jié)構(gòu)靜力學(xué)、結(jié)構(gòu)動(dòng)力學(xué)、剛體動(dòng)力學(xué)、流體動(dòng)力學(xué)、結(jié)構(gòu)熱力學(xué)、電磁場(chǎng)分析以及多物理場(chǎng)耦合分析等多個(gè)領(lǐng)域。這些功能使得工程師能夠?qū)?em>機(jī)械系統(tǒng)進(jìn)行全面的性能評(píng)估,從而優(yōu)化設(shè)計(jì),提高產(chǎn)品的可靠性和性能。
4676 3
力學(xué)AI有限元 ??? 12月前
Amesim電磁鐵仿真:電磁鐵結(jié)構(gòu)參數(shù)設(shè)計(jì)優(yōu)化的新方法 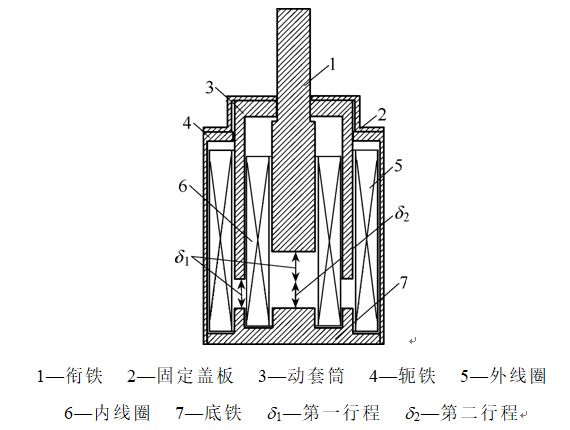
2)利用Ansys Maxwell軟件分別對(duì)雙行程電磁鐵第一、二行程的靜態(tài)吸力特性進(jìn)行仿真,通過(guò)求解電壓平衡方程和達(dá)朗貝爾運(yùn)動(dòng)方程得到動(dòng)態(tài)吸力特性,并在ADAMS軟件中實(shí)現(xiàn)了機(jī)械運(yùn)動(dòng)模型仿真,得到了位移時(shí)間曲線,描述了電磁鐵的動(dòng)態(tài)過(guò)程,為電磁鐵結(jié)構(gòu)參數(shù)優(yōu)化提供了有效的手段。
2812 1
技術(shù)哥 ??? 3年前
20條/頁(yè) 
 113
113 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
