



熱仿真代做,儲(chǔ)能、PCS、變流器、液冷板、管路、散熱器等產(chǎn)品均可 
熱仿真代做,儲(chǔ)能、PCS、變流器、液冷板、管路、散熱器等產(chǎn)品均可,價(jià)格根據(jù)產(chǎn)品復(fù)雜程度而定。
2138
熱設(shè)計(jì)Jason ??? 1年前
2025大賽優(yōu)秀作品 | 基于 Ansys Fluent 的旋流解吸器氣液傳質(zhì)強(qiáng)化與 PBM 仿真研究 
作品名稱:基于 Ansys Fluent 的旋流解吸器氣液傳質(zhì)強(qiáng)化與 PBM 仿真研究作者: 李炎杰 | 華東理工大學(xué) 碩士研究生關(guān)鍵詞:平板旋流解吸器,Ansys Fluent,群體平衡模型(PBM),硫化氫脫除作者說從平板旋流解吸器研發(fā)實(shí)踐看,Ansys Fluent 的多相流與群體平衡模型(PBM)耦合能力,精準(zhǔn)攻克了旋流場中氣泡破碎、聚并及氣液傳質(zhì)耦合等微觀瞬態(tài)過程的觀測難題
2927
Ansys中國 ??? 3月前
設(shè)計(jì)仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟(jì)性和NVH性能 
工程師試圖控制拖拽的主要方法之一是通過液力變矩器,該變矩器利用流體聯(lián)軸器將發(fā)動(dòng)機(jī)的扭矩傳遞并放大到變速器。液力變矩器由泵、渦輪、葉輪和包含在充滿傳動(dòng)液的腔內(nèi)的定子組成,此外還有鎖止離合器和阻尼器組件。 離合器由電子控制,以提供所需的滑移水平。在需要時(shí),離合器會(huì)鎖住,并在發(fā)動(dòng)機(jī)和變速器之間提供直接連接,從而達(dá)到接近100%的效率和最佳的燃油經(jīng)濟(jì)性。
2429
海克斯康設(shè)計(jì)與仿真 ??? 3年前
Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟(jì)性和NVH性能 
工程師試圖控制拖拽的主要方法之一是通過液力變矩器,該變矩器利用流體聯(lián)軸器將發(fā)動(dòng)機(jī)的扭矩傳遞并放大到變速器。液力變矩器由泵、渦輪、葉輪和包含在充滿傳動(dòng)液的腔內(nèi)的定子組成,此外還有鎖止離合器和阻尼器組件。 離合器由電子控制,以提供所需的滑移水平。在需要時(shí),離合器會(huì)鎖住,并 在發(fā)動(dòng)機(jī)和變速器之間提供直接連接,從而達(dá)到接近100%的效率和最佳的燃油經(jīng)濟(jì)性。
2617
Cruise ??? 3年前
設(shè)計(jì)仿真 | Adams FMI聯(lián)合仿真助力福特汽車優(yōu)化燃油經(jīng)濟(jì)性和NVH性能 
工程師試圖控制拖拽的主要方法之一是通過液力變矩器,該變矩器利用流體聯(lián)軸器將發(fā)動(dòng)機(jī)的扭矩傳遞并放大到變速器。液力變矩器由泵、渦輪、葉輪和包含在充滿傳動(dòng)液的腔內(nèi)的定子組成,此外還有鎖止離合器和阻尼器組件。 離合器由電子控制,以提供所需的滑移水平。在需要時(shí),離合器會(huì)鎖住,并在發(fā)動(dòng)機(jī)和變速器之間提供直接連接,從而達(dá)到接近100%的效率和最佳的燃油經(jīng)濟(jì)性。
4198 1
萬有引力LYQ ??? 2年前
419-攪拌器固液(歐拉)兩相流仿真及流固耦合預(yù)應(yīng)力模態(tài)計(jì)算WORKBENCH2020R1 

本課適合哪些人學(xué)習(xí):1、攪拌器仿真人士2、固液(歐拉)兩相攪拌仿真人士3、結(jié)構(gòu)靜力學(xué)、預(yù)應(yīng)力模態(tài)仿真人士4、單向流固耦合研究人士5、Workbench2020R1-SCDM-MESH-FLUENT-POST_TECPLOT2019應(yīng)用人士對(duì)學(xué)員的幫助是什么:1、攪拌器仿真的基本操作方法2、固液(歐拉)兩相攪拌的實(shí)現(xiàn)方式3、結(jié)構(gòu)靜力學(xué)、預(yù)應(yīng)力模態(tài)仿真方法4、
3353 3
仿真助手 ??? 3年前
設(shè)計(jì)仿真 | Adams變拓?fù)浞治鲋畟鞲?em>器 
在多體仿真中,所面臨的工況有很多種,不是簡單的規(guī)定一個(gè)時(shí)間,給定一個(gè)輸出步數(shù)就能滿足所有工況的仿真要求,經(jīng)常面臨仿真過程中對(duì)系統(tǒng)拓?fù)潢P(guān)系的變化、模型參數(shù)的調(diào)整等需求。此時(shí),Adams中的sensor(傳感器)就有了用武之處,通過sensor可以獲得某種狀態(tài),再通過腳本展開后繼的模型修改,從而可以完成絕大多數(shù)變拓?fù)湎嚓P(guān)的任務(wù)要求。
2794
海克斯康設(shè)計(jì)與仿真 ??? 1年前
基于ANSYS變磁阻式傳感器仿真課程 
通過變磁阻式傳感器工作原理及結(jié)構(gòu)、傳感器應(yīng)用、有限元計(jì)算知識(shí)等方面理論與仿真軟件設(shè)計(jì)實(shí)際工程變磁阻式傳感器設(shè)計(jì)仿真相結(jié)合,掌握2022 R1ANSYS Maxwell軟件進(jìn)行變磁阻式傳感器結(jié)構(gòu)方案設(shè)計(jì)及參數(shù)化優(yōu)化工作。? 工程案例:2個(gè)變磁阻式傳感器工程案例。? 經(jīng)典問題點(diǎn):靜磁場仿真、瞬態(tài)場仿真、結(jié)構(gòu)參數(shù)尺寸參數(shù)化、性能優(yōu)化、場結(jié)果計(jì)算等。
710
磁源 ??? 2年前
改良楔形葉片旋轉(zhuǎn)空化器水動(dòng)力學(xué)特性數(shù)值模擬分析 
空化器葉型改良后產(chǎn)生的空泡尺寸大于原始葉型產(chǎn)生的空泡,會(huì)導(dǎo)致空化器阻力矩增大。同時(shí),來流沖擊改良葉型進(jìn)口邊的上、下溝槽會(huì)導(dǎo)致局部高壓(圖 7 和圖 8),這也是改良葉型阻力矩大于原始葉型的原因之一。此外,2 種葉型阻力矩之間的差異將呈現(xiàn)隨轉(zhuǎn)速升高而變大的趨勢。
3176 2
Infiniteelements ??? 2年前
如何選擇合適的電磁場仿真算法 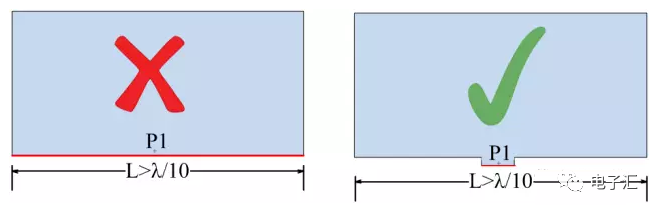
有限元分析的網(wǎng)格圖2)矩量法(Method of Moments, MoM)矩量法對(duì)積分形式的Maxwell方程在頻域求解,需要求解的未知量為金屬的表層電流分布。得到電流分布之后,仿真器根據(jù)格林函數(shù)進(jìn)行數(shù)值積分,即可得到求解空間任何點(diǎn)的場分布。而在有限元分析法中,未知量為空間每個(gè)點(diǎn)的場分布,求解矩陣維度大于矩量法。
3150 10 2
仿真客 ??? 3年前
基于fluent的氣液混合器的多相流仿真,視頻免費(fèi)無聲音,提供附件(需購買)練習(xí)。 
基于fluent的氣液混合器的多相流仿真,視頻免費(fèi)無聲音,提供附件(需購買)練習(xí)。
407
兵荒馬亂 ??? 6年前
基于Adams的磁流變阻尼器虛擬樣機(jī)仿真研究 
用有限元方法研究半主動(dòng)座椅懸架系統(tǒng) 的振動(dòng)磁流變液阻尼器汽車設(shè)計(jì)當(dāng)中,座椅在確保乘客舒適性方面發(fā)揮著重要作用,特別是在長途駕駛時(shí)。如今大多數(shù)制造商更多關(guān)注座椅的靜態(tài)舒適性,而對(duì)動(dòng)態(tài)舒適性關(guān)注有限。韋洛爾大學(xué)的這個(gè)學(xué)生項(xiàng)目幫助我們進(jìn)一步了解動(dòng)態(tài)舒適性的重要性。利用Adams仿真工具,學(xué)生們設(shè)計(jì)了一個(gè)模型,用PID控制 器和新設(shè)計(jì)的磁流變液阻尼器來考察半主動(dòng)座椅懸架系統(tǒng)的性能。
2594 3 2
上海庭田信息科技有限公司 ??? 4年前
9種電磁仿真軟件和方法,你會(huì)幾種? 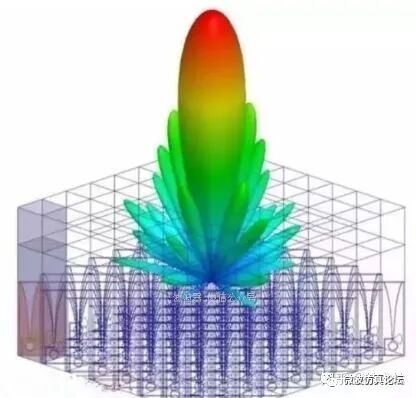
VoltaireXL" 仿真器內(nèi)設(shè)一個(gè)組件庫,在建立電路模型時(shí),可以調(diào)出微波電路所用的組件,其中無源器件有電感、電阻、電容、諧振電路、微帶線、帶狀線、同軸線等等,非線性 器件有雙極晶體管, 場效應(yīng)晶體管,二極管等等。"EMSight"仿真器是一個(gè)三維電磁場模擬程序包,可用于平面高頻電路和天線結(jié)構(gòu)的分析。特點(diǎn)是把修正譜域矩量法與直觀 的窗口圖形用戶接口(GUI)技術(shù)結(jié)合起來,使得計(jì)算速度加快許多。
3683 11 5
仿真客 ??? 3年前
制冷劑霧化的節(jié)流及分液特性探討 附噴霧學(xué)曹建明下載 
、蒸發(fā)器布風(fēng)均勻性(或蒸發(fā)盤管換熱均勻性)[2]等因素的影響,使蒸發(fā)器各并聯(lián)支路氣液兩相工質(zhì)分配不均,造成蒸發(fā)盤管面積未能得到充分利用,嚴(yán)重影響蒸發(fā)器的換熱性能。
2981 1
飛飛麗麗 ??? 4年前
2025大賽優(yōu)秀作品 | 氣液兩相流仿真技術(shù)研究與應(yīng)用實(shí)踐 
本研究梳理了兩相流仿真技術(shù)的情況,基于Ansys Fluent VOF+Lee模型的方法建立了正向設(shè)計(jì)能力,開展重力熱管、蒸發(fā)流道、3D散熱器的仿真實(shí)踐,仿真精度達(dá)到80%以上,指導(dǎo)了散熱器的設(shè)計(jì)優(yōu)化,具有良好的工程價(jià)值。此外,本研究思考并提出未來氣液兩相流仿真的發(fā)展方向,為行業(yè)提供了參考。挑戰(zhàn)/需求 芯片功率密度不斷升高,散熱成為瓶頸。
2319
Ansys中國 ??? 4月前
VirtualFlow | 熱管相變換熱仿真,支持不同尺度的氣液兩相相變計(jì)算 
以某物理研究所的環(huán)路熱管項(xiàng)目為例,在50W功率下2D軸對(duì)稱條件下,蒸發(fā)器內(nèi)的流場最終達(dá)到穩(wěn)態(tài),其液相體積分?jǐn)?shù)、相變速率、液體/氣體總體積、質(zhì)量流量等參數(shù)的計(jì)算結(jié)果與實(shí)驗(yàn)趨勢高度一致。蒸發(fā)器壁溫計(jì)算結(jié)果與測量結(jié)果的偏差基本控制在1.5℃以內(nèi),冷凝器部件仿真結(jié)果同樣表現(xiàn)出色。
2679
積鼎CFD流體仿真模擬 ??? 1年前
積鼎 VirtualFlow 案例 | 環(huán)路熱管相變換熱模擬,實(shí)現(xiàn)微通道氣液兩相、單相及流固耦合仿真計(jì)算 
其可用于模擬吸液芯的毛細(xì)現(xiàn)象、蒸發(fā)管的沸騰、冷凝器的冷凝等復(fù)雜現(xiàn)象,解決熱管試驗(yàn)參數(shù)不易測量和試驗(yàn)成本高等問題。軟件可以對(duì)流體回路的部件及換熱器等進(jìn)行微觀的氣液兩相、單相、流固耦合等模擬仿真計(jì)算,提取所仿真的物理現(xiàn)象及趨勢,并能與理論計(jì)算比較驗(yàn)證。2.
2501
積鼎CFD流體仿真模擬 ??? 1年前
解決氣液兩相流仿真難題,這款國產(chǎn)自主的流體力學(xué)仿真軟件有哪些特色? 
在航空航天領(lǐng)域,飛行器燃油流動(dòng)也是氣液兩相流的典型應(yīng)用場景,其流動(dòng)狀態(tài)直接關(guān)系到發(fā)動(dòng)機(jī)的性能和可靠性。VirtualFlow:氣液兩相流仿真的得力助手1、強(qiáng)大的多相流模型VirtualFlow 軟件針對(duì)氣液兩相流的特點(diǎn),提供了豐富且精準(zhǔn)的多相流模型。對(duì)于界面流問題,它采用了 VOF和 Level Set 方法。
2680
積鼎CFD流體仿真模擬 ??? 1年前
【STAR-CCM+電池冷卻】基于直流道液冷板的動(dòng)力電池冷卻性能仿真 
3.3 冷卻液質(zhì)量流量對(duì)冷卻液壓降的影響保持冷卻液入口溫度為20 ℃,調(diào)節(jié)冷卻液質(zhì)量流量Qin 分別設(shè)為0.25、0.30、0.35、0.40、0.45 kg/s 進(jìn)行仿真模擬,液冷板壓降Δp 隨冷卻液質(zhì)量流量Qin 的變化情況如圖7 所示。 冷卻液質(zhì)量流量增加,液冷板壓降增加幅度逐漸變大,因?yàn)槔鋮s液的沿程水頭損失與流速的二次方呈正比,所以液冷板壓降增加幅度變快。
4795 5
仿真客 ??? 3年前
分享:電磁仿真的3種主要技術(shù)和4種典型應(yīng)用 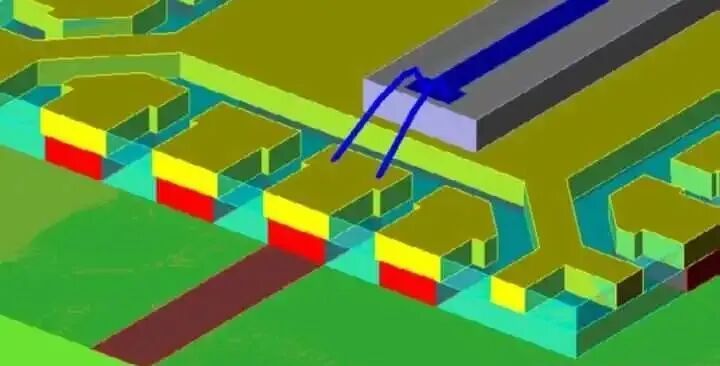
矩量法(MoM)3D 平面電磁仿真器用于無源電路分析高效用于平面和多層應(yīng)用;例如電子和天線有限元法(FEM)3D 全波電磁仿真器測量頻域用于任意 3D 結(jié)構(gòu),例如連接器、焊線和封裝有限差分時(shí)域法(FDTD)3D 電磁仿真器測量時(shí)域用于比感興趣的波長更大的結(jié)構(gòu),例如天線系統(tǒng)電磁仿真應(yīng)用
3128
仿真客 ??? 3年前
20條/頁 
 70
70 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
