



飛行器系統(tǒng)仿真與驗(yàn)證 
2.Simcenter Amesim系統(tǒng)仿真與驗(yàn)證方案 2.1 總體設(shè)計(jì)與仿真從設(shè)計(jì)仿真角度上來說,飛行器總體設(shè)計(jì)分為兩個(gè)大的過程: 設(shè)計(jì)過程:以飛行剖面為核心的總體設(shè)計(jì)過程,主要關(guān)注總體概念參數(shù)(直徑、長度、幾級(jí)等)、氣動(dòng)布局的定義、飛行器在不同階段的姿態(tài)定義(姿態(tài)角、攻角)、軌跡計(jì)算等過程 驗(yàn)證過程:軌跡、氣動(dòng)、控制、動(dòng)力學(xué)、發(fā)動(dòng)機(jī)等專業(yè)或分系統(tǒng)集成在一起
3813 2 1
航發(fā)設(shè)計(jì) ??? 3年前
ABAQUS四旋翼無人飛行器仿真分析 
應(yīng)用該仿真模型對(duì)該旋翼無人飛行器在旋翼升力、風(fēng)載荷及降落沖擊等工況下的結(jié)構(gòu)強(qiáng)度和剛度響應(yīng)進(jìn)行了仿真分析,得到了對(duì)應(yīng)的安全裕度數(shù)據(jù),為該無人機(jī)的結(jié)構(gòu)設(shè)計(jì)提供了理論依據(jù)。系留型四旋翼飛行器系統(tǒng)是一種有4個(gè)螺旋槳且螺旋槳呈十字交叉形式的飛行器,如圖1所示。整個(gè)飛行平臺(tái)結(jié)構(gòu)包含中心架(設(shè)備艙)、支撐臂、起落架及其他系統(tǒng)的受力結(jié)構(gòu)等。
5447 2 1
aero-engine ??? 2年前
基于實(shí)際工程的飛行器氣動(dòng)設(shè)計(jì)與仿真 
它不行,還是我不行 在飛行器氣動(dòng)力/熱的仿真中,為什么有的工程師仿真結(jié)果與風(fēng)洞試驗(yàn)數(shù)據(jù)吻合較好,有的工程師差異較大?無非,就是它不行,還是自己不行的問題。 它不行,講的是,自己選擇的網(wǎng)格生成工具及求解器,本身就不適合自己需要仿真模擬的工況。 我不行,指的是,工具行,自己沒掌握。
6073
我愛飛機(jī) ??? 2年前
starccm實(shí)現(xiàn)COMSOL案例----微執(zhí)行器電熱耦合仿真 
微制動(dòng)器-電熱耦合仿真.sim本文是通過starccm軟件來復(fù)現(xiàn)comsol中的微執(zhí)行器案例,進(jìn)行電熱耦合分析。
2171
fish_liu ??? 9月前
starccm實(shí)現(xiàn)COMSOL案例----微執(zhí)行器電仿真
電仿真.sim本文是通過starccm軟件來復(fù)現(xiàn)comsol中的微執(zhí)行器案例,進(jìn)行電分析。
1163
fish_liu ??? 9月前
STARCCM 攪拌器自由液面仿真模型 
攪拌器槳葉高速旋轉(zhuǎn)帶來的漩渦,部分樣式攪拌雖然可以通過公式估算,但更多的攪拌器需要通過仿真方式來獲得。
3249 1 5
海寬CFD ??? 1年前
無人機(jī)葉片顫振的詳細(xì)介紹及流固耦合仿真分析講解(含105講視頻教程) 
往期推薦eVTOL電動(dòng)垂直起降飛行器研發(fā)降噪處理案例及常見方案介紹(附eVTOL研發(fā)資料下載)航天航空前沿技術(shù)分享:飛行器降噪、地面共振測試、eVTOL開發(fā)、敏捷開發(fā)......
5500 30 8
技術(shù)鄰公告 ??? 1年前
基于CFX的四軸飛行器無人機(jī)進(jìn)行 CFD 仿真 
<p><span style="color: rgb(85, 85, 85); background-color: rgb(255, 255, 255);">使用真實(shí)旋轉(zhuǎn)葉片和 ANSYS CFX 對(duì)四軸飛行器無人機(jī)進(jìn)行 CFD 仿真。
2030
仿真資料吧 ??? 1年前
空調(diào)外機(jī)熱風(fēng)短路現(xiàn)象仿真復(fù)現(xiàn)---starccm+旋轉(zhuǎn)機(jī)械 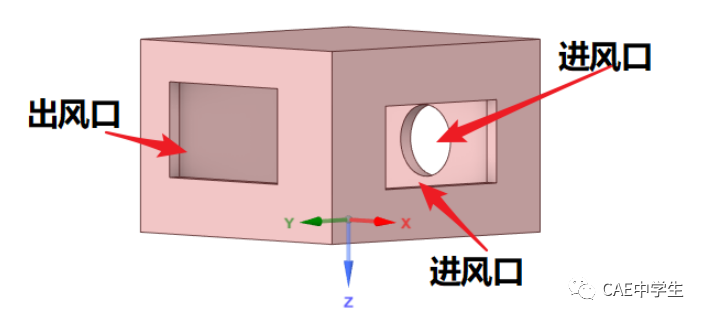
實(shí)現(xiàn)方式和fluent類似,需要用到風(fēng)扇邊界條件: 4.1 找到inlet的面,一般是放置冷凝器風(fēng)機(jī)的面,然后設(shè)置風(fēng)扇邊界,如下圖, 我們導(dǎo)入PQ曲線采用曲線表的形式,還有一種多項(xiàng)式也可以使用,我認(rèn)為表格更方便一些,直接從風(fēng)扇說明書取點(diǎn)即可,而且在使用starccm中有很多的計(jì)算采用導(dǎo)入表格的方式會(huì)很大的提高效率。
3366 2 1
雙螺桿泵 ??? 2年前
Starccm+基礎(chǔ)仿真流程 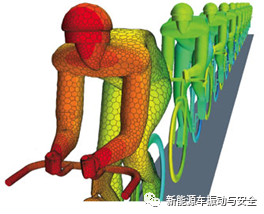
Starccm+ 基礎(chǔ)仿真流程 STAR-CCM+ 軟件是由CD-adapcoGroup這個(gè)公司開發(fā),后來被西門子收購了,現(xiàn)在是西門子軟件下面非常重要的軟件拼圖之一。它是做計(jì)算流體力學(xué)(CFD)仿真分析的軟件,包括層流,湍流,多相流,氣穴,輻射,燃燒,邊界層轉(zhuǎn)戾,高馬赫流,共軛熱傳導(dǎo)等等多物理模型,還有專門的熱交換器和風(fēng)扇模型、電池電化學(xué)模型等。
3716 1 1
仿真客 ??? 3年前
雙旋翼飛行器如何在旋翼故障時(shí)避免墜毀 
綜合仿真與視景顯示 視景顯示的原理如下圖所示 ,Simulink將仿真得到的數(shù)據(jù)發(fā)送至FlightGear中,驅(qū)動(dòng)模型的運(yùn)動(dòng)顯示,使控制器的效果和飛行器的狀態(tài)更加直觀的展示。 圖5:FlightGear視景顯示原理 為了驗(yàn)證被動(dòng)容錯(cuò)控制器的效果,我們給定一定的任務(wù)的條件進(jìn)行仿真。
2339
無人機(jī)10086 ??? 3年前
基于Nastran軟件的飛行器舵系統(tǒng)模態(tài)研究 
因此,有必要基于仿真計(jì)算方法對(duì)飛行器舵系統(tǒng)模態(tài)敏感因素進(jìn)行研究,以便指導(dǎo)舵系統(tǒng)結(jié)構(gòu)設(shè)計(jì),滿足舵系統(tǒng)模態(tài)要求。本文基于Nastran軟件的模態(tài)計(jì)算方法,開展理論分析及仿真計(jì)算研究,工程應(yīng)用價(jià)值明顯。以某飛行器舵系統(tǒng)為研究對(duì)象,其主要由空氣舵(舵面和舵軸)、舵機(jī)和傳動(dòng)機(jī)構(gòu)組成,傳動(dòng)機(jī)構(gòu)包括舵軸支撐軸承、搖臂和銷軸等結(jié)構(gòu)。
4385 3 1
Whitney ??? 2年前
eVTOL飛行器螺旋槳多學(xué)科設(shè)計(jì)分析與優(yōu)化 
電動(dòng)垂直起降(eVTOL)飛行器在獨(dú)特的多學(xué)科環(huán)境中工作。這類飛行器的螺旋槳必須在巡航以及垂直和過渡飛行模式下運(yùn)行。一些設(shè)計(jì)使用一組電動(dòng)高升力螺旋槳(HLP)來增加流量,以在低速飛行條件下增加升力,而其他設(shè)計(jì)可以為垂直或短距起飛和著陸(V/STOL)提供額外的推力。幾個(gè)概念旨在實(shí)現(xiàn)機(jī)身空氣動(dòng)力學(xué)和戰(zhàn)略集成推進(jìn)器之間的良好相互作用,實(shí)現(xiàn)迄今為止無法實(shí)現(xiàn)的性能優(yōu)勢。
5462 8 4
aero-engine ??? 2年前
通過 CFD 仿真延長四旋翼無人機(jī)的飛行時(shí)間和范圍 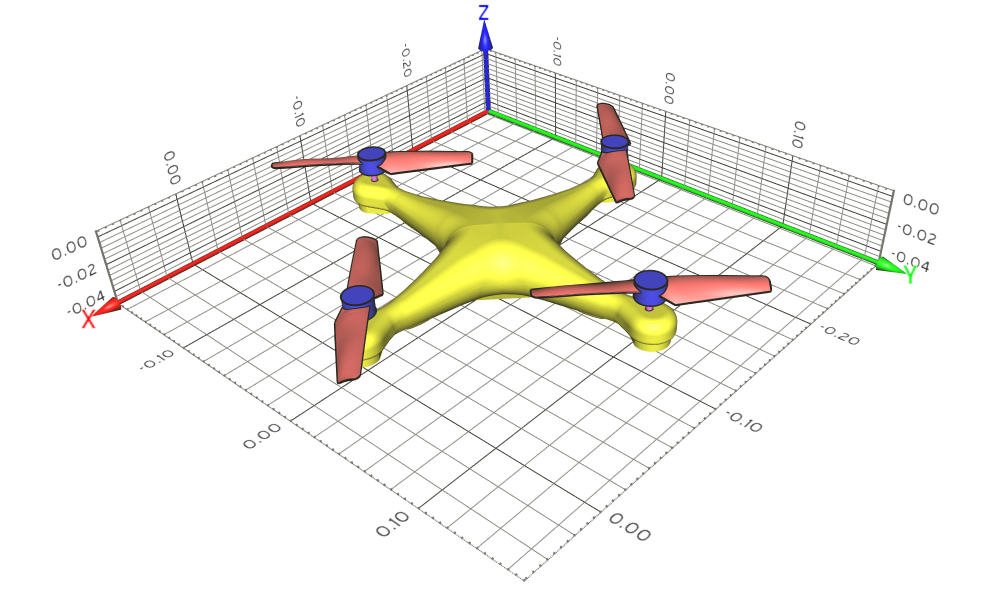
高端艙中很少有人能達(dá)到接近一小時(shí)的飛行時(shí)間。計(jì)算流體動(dòng)力學(xué)(CFD)的應(yīng)用可以幫助顯著提高無人機(jī)的效率并延長其飛行時(shí)間和航程。在本文中,我們將通過一個(gè)示例演示如何:工業(yè)無人機(jī)在懸停模式下的空氣動(dòng)力學(xué)仿真和優(yōu)化,這是此類無人機(jī)中能量最密集的模式。四軸飛行器幾何我們選擇了當(dāng)今使用最廣泛的旋翼無人機(jī)配置之一:四軸飛行器。
3159 4 2
Cadence CFD學(xué)習(xí) ??? 3年前
飛行器流固相互作用(FSI)仿真賞析(僅3D模型) 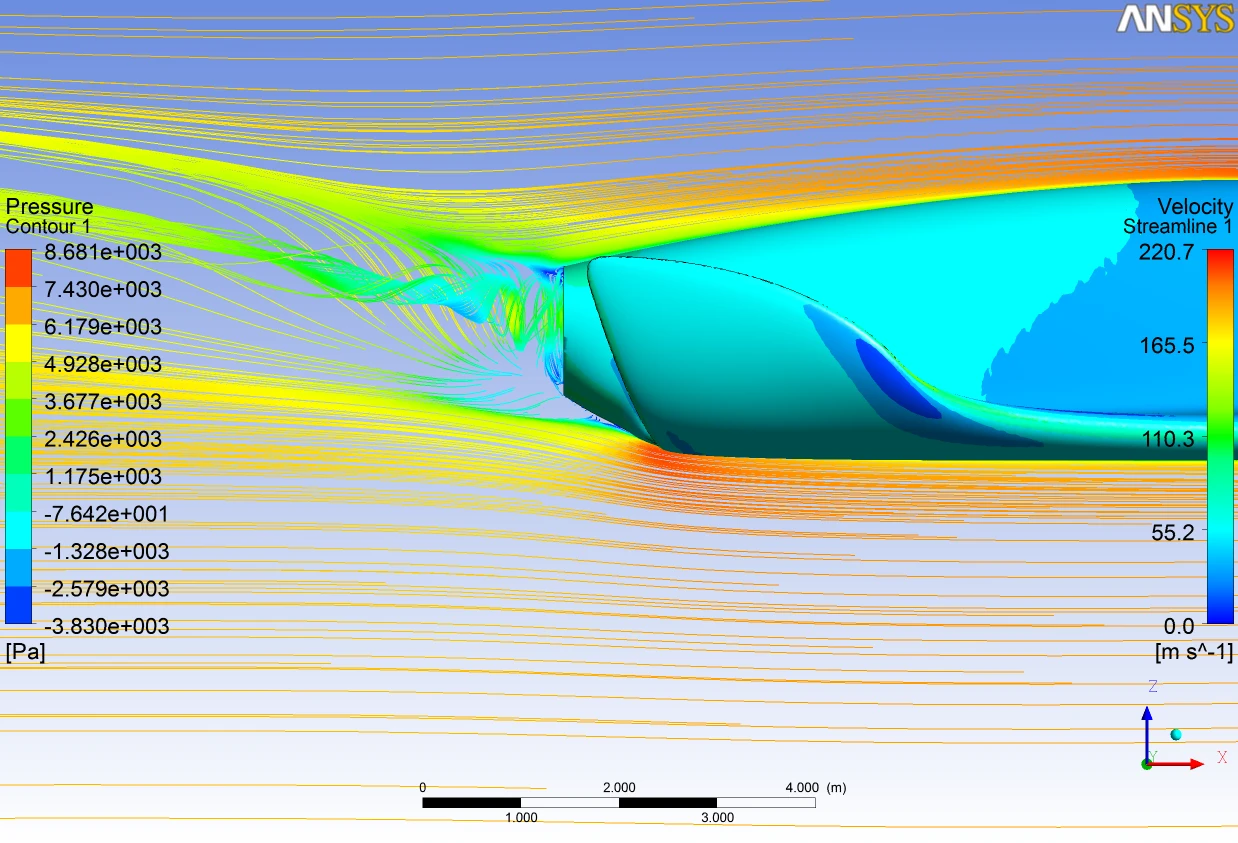
使用 ANSYS Workbench 進(jìn)行了飛機(jī)的流固耦合仿真。對(duì)于 CFD 分析,使用了 CFX,然后使用 Workbench 中的 ANSYS Mechanical 工具將 CFD 模擬(壓力載荷)的結(jié)果傳輸?shù)浇Y(jié)構(gòu)分析。模型格式stp?.CATProduct?
2232 1
仿真資料吧 ??? 1年前
GT-SUITE在電動(dòng)飛行器上的應(yīng)用 附GT-SUITE新能源2019下載 
對(duì)電動(dòng)飛行器熱管理系統(tǒng)進(jìn)行仿真,優(yōu)化熱管理策略,對(duì)飛行器熱失衡進(jìn)行仿真。
2453
機(jī)械加 ??? 4年前
使用TCFD進(jìn)行螺旋槳式飛行器外流場分析 
試驗(yàn)數(shù)據(jù)對(duì)比 在本節(jié)中,我們將結(jié)果與幾次飛行和風(fēng)洞試驗(yàn)數(shù)據(jù)進(jìn)行比較。必須注意的是,仿真模擬和實(shí)際試驗(yàn)數(shù)據(jù)的比較往往是有問題的,因?yàn)楹茈y去完全模擬實(shí)際的試驗(yàn)條件。比如在仿真中,戰(zhàn)斗機(jī)模型都進(jìn)行了簡化,同樣的,風(fēng)洞模型也進(jìn)行了簡化;散熱器入口,出口和化油器入口等也都被設(shè)置為了普通的壁面。
2415 1
aero-engine ??? 2年前
飛行器尾舵純模態(tài)試驗(yàn) 
圖1 不同飛行器的尾舵 尾舵一般由舵機(jī)、舵軸和舵面三部分構(gòu)成,在系統(tǒng)工作時(shí),舵機(jī)根據(jù)所接收到的指令驅(qū)動(dòng)舵面旋轉(zhuǎn)到指定的工作位置,從而實(shí)現(xiàn)對(duì)飛行器飛行姿態(tài)、方向的有效控制,增強(qiáng)飛行器的穩(wěn)定性,改善飛行器的操縱性能。尾舵的工作動(dòng)力學(xué)特性不僅關(guān)系到飛行狀態(tài)質(zhì)量與制導(dǎo)精度,還直接影響飛行器的可靠性及安全性。
2165 1
漢航 ??? 2年前
STARCCM+入門到精通系列教程 

,多體的物理模型的網(wǎng)格劃分處理;第五部分(8-10章節(jié)):該部分為新能源電池?zé)峁芾?em>仿真分析實(shí)例,講解電池包仿真工況分析,如何進(jìn)行模型前處理,解決表面穿刺等實(shí)際問題;講解模型網(wǎng)格劃分、邊界條件設(shè)置、求解器、后處理等設(shè)置;講解如何運(yùn)用場函數(shù)實(shí)現(xiàn)溫度和流速的回差控制,實(shí)現(xiàn)熱管理控制策略;第五部分(11-13章節(jié)):該部分為Java宏命令二次開發(fā)應(yīng)用講解,Java宏的入門介紹,錄制、編譯、播放等操作命令
14969 5 58
朱古力 ??? 4年前
eVTOL電動(dòng)垂直起降飛行器研發(fā)降噪處理案例及常見方案介紹(附eVTOL研發(fā)資料下載) 
就eVTOL研發(fā)制造來說,降噪是其一大痛點(diǎn),在eVTOL研發(fā)過程中必須著重關(guān)注飛行器降噪,本文為大家展開敘述目前飛行器降噪所涉及的先進(jìn)技術(shù)及其研發(fā)現(xiàn)狀。
3739 1
技術(shù)鄰公告 ??? 1年前
20條/頁 
 18
18 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
