



電動汽車用兩擋AMT執行機構設計優化與試驗研究 
公司自主研發了TCU控制器用于變速器換擋電動機驅動和擋位位置的探測,以及運行試驗程序(見圖11)。圖10 2T07AMT試驗箱圖11 兩擋AMT用TCU控制器下面詳細對比兩個方案靜態換擋的數據。之所以選擇靜態換擋的數據進行對比,是為了排除動態換擋過程中其他干擾因素。比如,動態換擋時電動機調速會影響整個換擋時間,從而干擾執行機構運動時間的分析。
2940
EDC電驅未來 ??? 4年前
數控車床刀架不能啟動?用這7個小方法解決 
02 刀架某一位刀號轉不停,其余刀位可以轉動1.此刀位的霍爾元件損壞確認是哪個刀位使刀架轉不停,在系統上輸入指令轉動該刀位,用萬用表量該刀位信號觸點對24V觸點是否有電壓變化。若無變化,可判定為該刀位霍爾元件損壞,更換發信盤或霍爾元件即可。
2464
數控編程教學 ??? 4年前
經典的行位出行位+前模行位結構解析 
— 、產品進膠方式:產品進膠方式有很多種,有搭底進膠,潛水進膠,直接澆口,牛角進膠,側進膠,點進膠等,此產品外觀要求嚴格,效率要求高, 客戶要求采用一點開放式熱流道轉冷流道進膠,由于唧嘴的溫度很高,單獨設計螺旋運水,如下圖所示:二 、 通過斜率分析可以看出,產品四周存在倒扣,處理外圍倒扣的方式一般設計行位結構,此產品不但外圍四邊存在倒扣,產品內部由于裝配的需要,內部還設計了四段卡扣,
3261
UG模具設計材料 ??? 4年前
全開源最小電壓表:24位ADC,測量0~2V,五位半 
ADS1255,首先5VUSB的電源輸入后,升壓到6.5V,防止輸入電壓波動,然后6.5V通過LDO轉成5V模擬電源和3.3V數字電源,5V模擬電源通過高精度參考電壓芯片ADR421ARZ轉成2.5V參考電壓。這是V10的原理圖,實際需要把R11和R12電阻去掉;參考電壓輸出后可以加跟隨器匹配下;ADS1255輸入端參考手冊調整下。
2159
電子設計聯盟 ??? 3年前
【機械設計】模具滑塊(行位)結構,搞懂了輕松做設計 
1、滑塊是為了解決倒勾而發展的模具機構,其基本原理是將模具開閉的垂直運動,轉向成水平運動。 2、為了配合倒勾位置在公?;蛘呤悄改?,而變化出不同的機構形式。滑塊機構為下列幾項基本機構加以組合而成。
5770 1 1
機械工程師 ??? 4年前
UG模具結構資料 前模強脫機構的設計 
,前模鑲件會跟著產品走一段距離,頂針板碰到前模仁底部面后就不能繼續跟著產品走,這是產品已經脫離前模一段距離,鑲件的周圍已有空間讓塑膠進行變形,這是產品的倒扣才可順利強脫,合模時回針強行將頂針板回位,即前模鑲件回位,進行下個產品循環生產。
2604 2 1
UG模具設計材料 ??? 3年前
出口模要求那么高,滑塊機構設計有哪些要點? 
滑塊機構設計細節要求1)行位座左右兩側一定要跟平導軌或L形導軌摩擦,不能跟模胚摩擦。2)行位座底面的耐磨片要高出行位槽0.5mm,耐磨片的面積盡量需大。3)當行位座深入到內模,耐磨片也要深入到內模里,而且要做成一整塊。4)當耐磨片出到擠緊塊上時,耐磨片要高出擠緊塊0.5mm。5)當模胚原身留壓行位座時,模胚上必須增加耐磨片。
2302
UG模具設計材料 ??? 4年前
出口模要求那么高,滑塊機構設計有哪些要點? 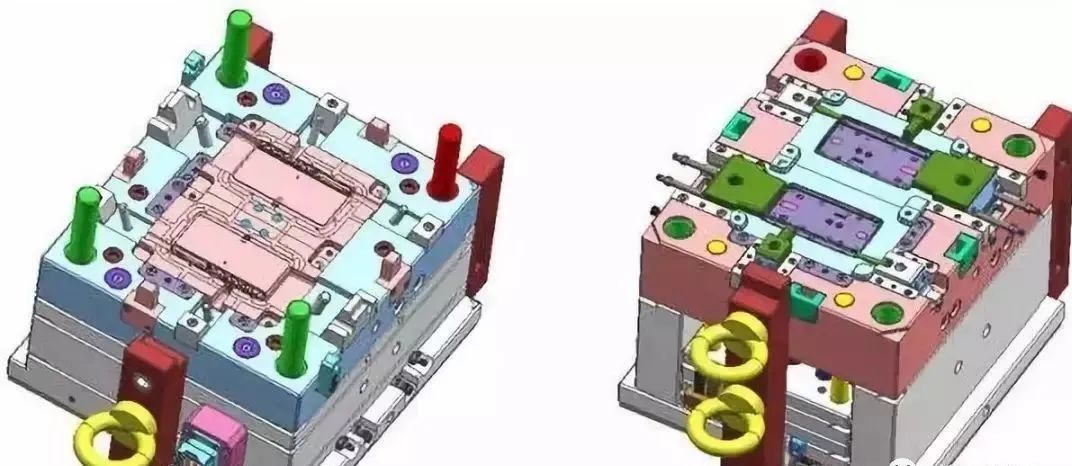
滑塊機構設計細節要求1)行位座左右兩側一定要跟平導軌或L形導軌摩擦,不能跟模胚摩擦。2)行位座底面的耐磨片要高出行位槽0.5mm,耐磨片的面積盡量需大。3)當行位座深入到內模,耐磨片也要深入到內模里,而且要做成一整塊。4)當耐磨片出到擠緊塊上時,耐磨片要高出擠緊塊0.5mm。5)當模胚原身留壓行位座時,模胚上必須增加耐磨片。
3962 3
張偉一 ??? 2年前
taobao京東聯盟轉鏈群發軟件工具機器人
這是京品庫開發的軟件,支持taobao京東的優惠商品批量鏈接轉鏈、口令轉鏈。同時,QQ群和微信群的消息也能互通,例如,采集QQ群的消息,能分別轉發到QQ群或者微信群,適用于社群達人、種草群等。軟件的優點是,相比其他的軟件,外觀設計很好看;同時軟件對賬號進行自檢風控;也可以設置多個推廣位,方便管理代理;根據商品的口令或者鏈接自動補圖、關鍵詞屏蔽、替換、添加消息前后綴、不轉無效鏈接等。
2023
jingpinku ??? 4年前
基于DeltaD打印機的剛柔耦合運動學分析 
,并結合模型的實際尺寸建立了打印機的數學模型,結合Adams和HyGpermensh等軟件完成對模型的驗證以及傳動的誤差分析.1 Delta打印機工作概述本文主要針對Delta運動模型進行分析,因此對三維模型進行了適當簡化,結構主要由靜平臺?轉臂?擺臂以及動平臺構成,其中靜平臺主要安裝轉臂的驅動電機以驅動轉臂完成復雜的打印動作;轉臂及擺臂主要輔助動平臺能夠多自由度完成相應的打印動作
4398 3
擺渡人張 ??? 2年前
電機正轉與反轉的幾種解決方法(附電路圖的分析) 
在實際中可能出現這種情況,由于負載短路或大電流長期作用,接觸器的主觸點被強烈的電弧“燒焊”在一起,或者接觸器機構失靈,使銜鐵卡住,總處于吸合狀態,這些都可能使主觸點不能斷開,這時如果另一接觸器動作,就會造成電源短路事故。
2315
電氣分享社區 ??? 3年前
牛頭刨床機構分析 
數學模型已知牛頭刨床主運動機構各構件的尺寸為:l1=125mm,l3=600mm,l4=150mm,l6=275mm,l'6=575mm,原動件1以勻角速度ω1=1rad/s逆時針轉動,計算該機構中各從動件的角位移、角速度和角加速度以及刨頭5上E點的位置、速度和加速度,并繪制出運動線圖2. matlab代碼function main% 輸入已知數據clear;i1=0.125;i3
2701
FE-有限元鷹 ??? 3年前
模具人的行話,PL面、枕位、碰穿、扣位、飛模..... 
客戶提供產品圖→分析產品→確認塑料品種→確認模具材質→轉工程圖→乘縮水作鏡相→完善組立圖→訂模胚→訂模仁料→拔模→3D分模→確定流道/澆口方式→參照排位圖進行結構設計→拆鑲件→更正3D→工程出圖《包括:模仁/鑲件/模胚/散件》→做BOM表→校對審核。40. 脫模有幾種方式?順脫和強脫。41. 進膠方式有哪些?
3456
UG模具設計材料 ??? 4年前
搶占C位!在2026世亞智博會,將您的品牌釘在行業領導位!
搶占C位!在2026世亞智博會,將您的品牌釘在行業領導位! 
升級AI智能匹配系統,提前30天完成品牌與目標客戶的精準配對,開設“一對一閉門對接會”“全球買家團定向洽談專場”,并聯動投資機構、科研院所搭建資源對接通道,數據顯示展會有效對接率較行業平均水平提升47%,助力品牌將領導力認知轉化為實際商業合作。
1557
數字中國產業展會 ??? 5月前
采用32位RISC雙核架構的高性能雙核低功耗無線音頻SoC芯片-BP2668Ax 
采用32位RISC雙核架構,集成FPU、FFT加速器和AI加速器,支持SIMD和DSP指令,集合強大算力、高保真音頻與低功耗特性。支持豐富的音效處理算法,如專業卡拉OK算法、回聲消除、人聲激勵等。集成4路32位Audio ADC和4路Audio DAC,支持高保真音頻輸入輸出。
745
如果我年少有為 ??? 11天前
倒扣較大,汽車模的斜頂機構如何設計 
二、斜頂頭的設計注意事項1)斜頂頭是扣位的成型零件,不易加工,設計的時候必須要有兩個基準面成90°角度,注意斜頂頭的斜度面比斜頂桿角度大2度,如圖所示。
2777 1 1
UG模具設計材料 ??? 4年前
便攜式耳機中應用的高精度32位高性能DSP音頻處理芯片-DU561 
該芯片支持低功耗Deepsleep模式,內置LDO實現了5V轉3.3V,3.3V轉1.2V的電源轉換,支持DC 3.3V~5V電源供電,在音頻處理方面,支持8~192KHz采樣率,較大有效位寬32bits;包含4路Audio-ADC(信噪比≥94dB)3路Audio-DAC(信噪比≥105dB)確保高質量的音頻采集和輸出。
1829
如果我年少有為 ??? 2月前
一大波棘輪動畫,十分珍貴! 
常用的外嚙合式棘輪機構,由主動擺桿,棘爪,棘輪、止回棘爪和機架組成(前面介紹的手動絞盤基本上就是一個棘輪機構的實物模型)。常用于各種機床和自動機的中間歇進給或回轉工作臺的轉位上,也常用在千斤頂上,在自行車中棘輪機構用于單向驅動,在手動絞車中棘輪機構常用以防止逆轉。其實它的應用非常廣泛。
2688
機械學霸 ??? 3年前
【原理圖解】純電車型減速器和混動車型變速器
(5) 油泵信息HEV 模式下 P 位、 D 位 數 據 流 信 息 如 圖 3-92 和 圖 3-93 所 示: 油 泵 壓 力 在 - 1. 38 ~ 21. 8bar 之 間(1bar = 105 Pa) ; 電 機 運 行 占 空 比 在 0% ~ 100% 之 間; 電 機 使 能 信 息 為 使 能-禁 止; 電 機 轉 速 在 0 ~10000r / min 之間。
3126 5 3
EDC電驅未來 ??? 3年前
一種變軸螺旋槳水空跨域無人航行器設計和控制技術 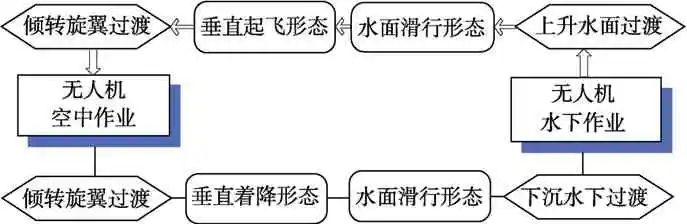
這里首先介紹螺旋槳變軸傾轉機構的設計。本文目前所設計的無人航行器模型屬于中小型無人機,動力采用具有使用與控制便捷性的直流無刷電動機。傾轉機構由舵機與電機殼體側面以軸承相連。傾轉舵機與電機呈直角動態連接,可實現電機軸繞支撐桿作任意角度轉動。螺旋槳軸轉動的角度由飛行控制模塊根據飛行狀態需求作定位傾轉。目前,僅設置兩個前空氣螺旋槳,繞y 方向可作任意角度轉動和定位。
6361 1 2
aero-engine ??? 2年前
20條/頁 
 43
43 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
