



AMESim電控單體泵高速電磁閥多目標(biāo)優(yōu)化分析 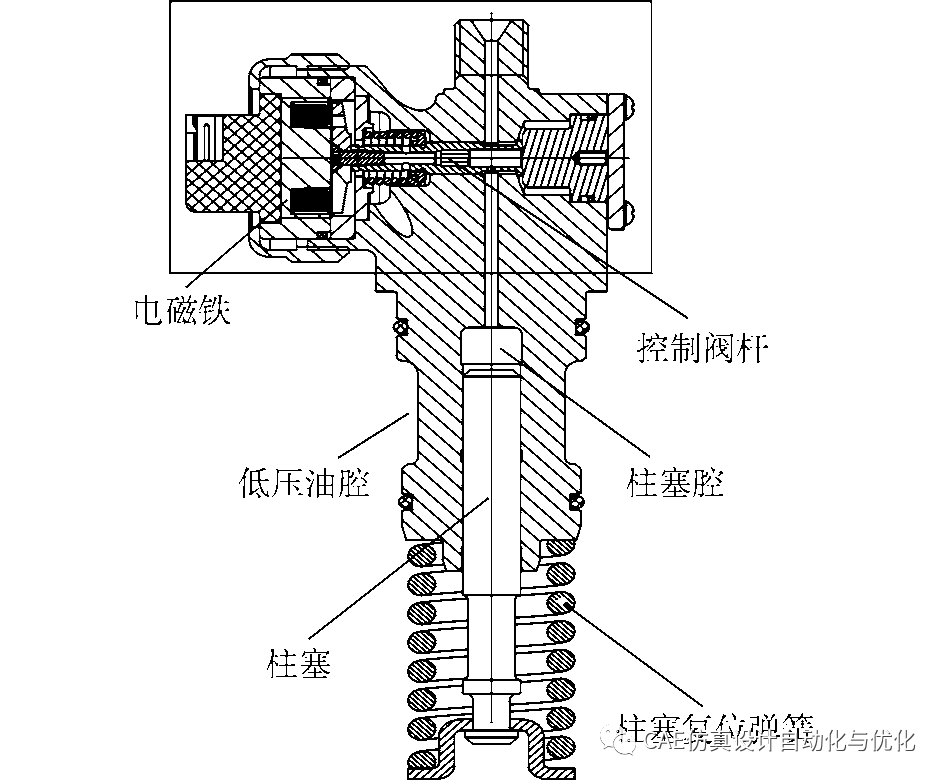
圖7 電控單體泵多目標(biāo)優(yōu)化模型4.4 多目標(biāo)優(yōu)化結(jié)果分析 圖8(a)所示為電磁閥響應(yīng)延遲時(shí)間多目標(biāo)優(yōu)化解集,從中選取符合電磁閥開(kāi)啟、關(guān)閉延遲時(shí)間都最小的Pareto最優(yōu)解集前沿,如圖8(b)所示,在Pareto前沿上選取滿足優(yōu)化目標(biāo)的點(diǎn),點(diǎn)A為優(yōu)化前電磁閥響應(yīng)延遲時(shí)間點(diǎn),點(diǎn)C為關(guān)閉延遲最小點(diǎn),點(diǎn)D為開(kāi)啟延遲最小點(diǎn),但這兩個(gè)點(diǎn)的參數(shù)配置均只能實(shí)現(xiàn)對(duì)單個(gè)目標(biāo)的優(yōu)化,為了同時(shí)實(shí)現(xiàn)對(duì)電磁閥開(kāi)啟和關(guān)閉延遲時(shí)間優(yōu)化的目標(biāo)
2985 1
技術(shù)哥 ??? 3年前
hypermesh多目標(biāo)優(yōu)化要注意那些問(wèn)題?
hypermesh多目標(biāo)優(yōu)化要注意那些問(wèn)題?
2749 5 1
lz1234 ??? 1年前
粒子群算法PSO與MATLAB程序視頻教程動(dòng)態(tài)優(yōu)化及多目標(biāo)優(yōu)化 

,基于敏感粒子的動(dòng)態(tài)粒子群算法尋找雙峰動(dòng)態(tài)函數(shù)最優(yōu)值,多目標(biāo)背包優(yōu)化問(wèn)題用多目標(biāo)粒子群算法求解,網(wǎng)絡(luò)流傳與正版粒子群算法工具箱PSOt應(yīng)用,MATLAB自帶算法命令與約束CPSO工具箱詳解,約束CPSO工具箱編程應(yīng)用及各種類(lèi)型程序。? ? ?
910 1 10
鄭一 ??? 7年前
多特征融合的多目標(biāo)跟蹤網(wǎng)絡(luò) 
以上基于聚類(lèi)的無(wú)監(jiān)督方法可以獲得一定的場(chǎng)景泛化能力來(lái)應(yīng)對(duì)光線變化,但僅使用二維圖像對(duì)復(fù)雜場(chǎng)景分割的精度依舊有限且難以進(jìn)行場(chǎng)景感知,亦存在較多局限性。 針對(duì)室內(nèi)場(chǎng)景目標(biāo)多種多樣,各目標(biāo)之間差異較大,比如有靠椅、有凳子等,傳統(tǒng)圖像算法難以完整的分割出目標(biāo),且難以獲得類(lèi)別標(biāo)簽等更多的信息。
2536
駕駛哥 ??? 4年前
基于optistruct汽車(chē)控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)?em>優(yōu)化案例 
本例以汽車(chē)控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)?em>優(yōu)化為例,講述在optistruct中是如何進(jìn)行多目標(biāo)拓?fù)?em>優(yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學(xué)也可以聯(lián)系我,有相關(guān)的資料購(gòu)買(mǎi)后對(duì)于模型中不懂的地方都可以問(wèn)
2225 1 9
lz1234 ??? 3年前
基于多工況加權(quán)柔度響應(yīng)的汽車(chē)控制臂拓?fù)?em>優(yōu)化 
三、挑戰(zhàn)與注意事項(xiàng)· 權(quán)重因子的敏感性:不同的權(quán)重分配會(huì)導(dǎo)致截然不同的拓?fù)浣Y(jié)構(gòu),需要根據(jù)工程目標(biāo)進(jìn)行多次試算和調(diào)整。· 模態(tài)頻率約束:有時(shí)為了控制NVH(噪聲、振動(dòng)與平順性)性能,需要在優(yōu)化中加入頻率約束(如一階模態(tài)頻率>某個(gè)值)。· 應(yīng)力約束:柔度優(yōu)化不能直接控制應(yīng)力,最優(yōu)剛度設(shè)計(jì)可能存在應(yīng)力集中。
598
320科技工作室 ??? 5天前
SerDes設(shè)計(jì)中高速傳輸線的人工智能驅(qū)動(dòng)多參數(shù)多目標(biāo)優(yōu)化流程(7月29日直播) 
7月29日,Ansys官方研討會(huì)『SerDes設(shè)計(jì)中高速傳輸線的人工智能驅(qū)動(dòng)多參數(shù)多目標(biāo)優(yōu)化流程』為您分享如何借助Ansys RaptorAI,通過(guò)人工智能技術(shù)實(shí)現(xiàn)SerDes(高速傳輸線)的多參數(shù)、多目標(biāo)協(xié)同優(yōu)化,加速設(shè)計(jì)流程、提升設(shè)計(jì)質(zhì)量。
2577
技術(shù)鄰公告 ??? 9月前
IPM電機(jī)隔磁橋電磁&結(jié)構(gòu)多目標(biāo)優(yōu)化設(shè)計(jì) 
因此,如何在隔磁橋的尺寸設(shè)計(jì)中兼顧電磁性能和結(jié)構(gòu)強(qiáng)度,成為一個(gè)典型的多物理場(chǎng)權(quán)衡設(shè)計(jì)問(wèn)題。然而,僅憑借經(jīng)驗(yàn)來(lái)設(shè)計(jì)滿足所有設(shè)計(jì)任務(wù)要求的轉(zhuǎn)子隔磁橋尺寸非常具有挑戰(zhàn)性。在這個(gè)案例中,我們將展示如何利用Maxwell UDP(參數(shù)化轉(zhuǎn)子幾何),結(jié)合Ansys Maxwell、Mechanical和optiSLang,來(lái)實(shí)現(xiàn)對(duì)IPM轉(zhuǎn)子隔磁橋進(jìn)行多物理、多目標(biāo)優(yōu)化設(shè)計(jì)。
2655
上海笛佼信息科技有限公司 ??? 2年前
多目標(biāo)優(yōu)化時(shí)量綱歸一化問(wèn)題?
我有兩個(gè)目標(biāo)函數(shù)分別是力均勻性和形面精度,需將這兩個(gè)目標(biāo)函數(shù)轉(zhuǎn)換成一個(gè)目標(biāo)函數(shù)f。在歸一化過(guò)程中,f1max,f1min,這些界限值是怎么選取的?是根據(jù)實(shí)際的需求,設(shè)定為固定值;還是說(shuō)f1max f1min是要隨著迭代過(guò)程進(jìn)行也進(jìn)行變化?
2652 1 3
劉嫣然 ??? 3年前
Isight--響應(yīng)面分析+單目標(biāo)或多目標(biāo)優(yōu)化--操作流程 
本節(jié)課主要講解一下如何用Isight讀取已經(jīng)處理好的數(shù)據(jù)進(jìn)行響應(yīng)面近似模型建立以及用NLPQL 算法為例進(jìn)行講解單目標(biāo)優(yōu)化問(wèn)題。多目標(biāo)優(yōu)化問(wèn)題類(lèi)似處理。
143 4
東邪不邪 ??? 4年前
230基于matlab的布谷鳥(niǎo)(COA)多目標(biāo)優(yōu)化算法 
基于matlab的布谷鳥(niǎo)(COA)多目標(biāo)優(yōu)化算法,以 滿意度、成本、時(shí)間、質(zhì)量為目標(biāo)的多目標(biāo)優(yōu)化求解代碼。程序已調(diào)通,可直接運(yùn)行。
2093
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于SFE全參數(shù)化副車(chē)架多學(xué)科優(yōu)化設(shè)計(jì) 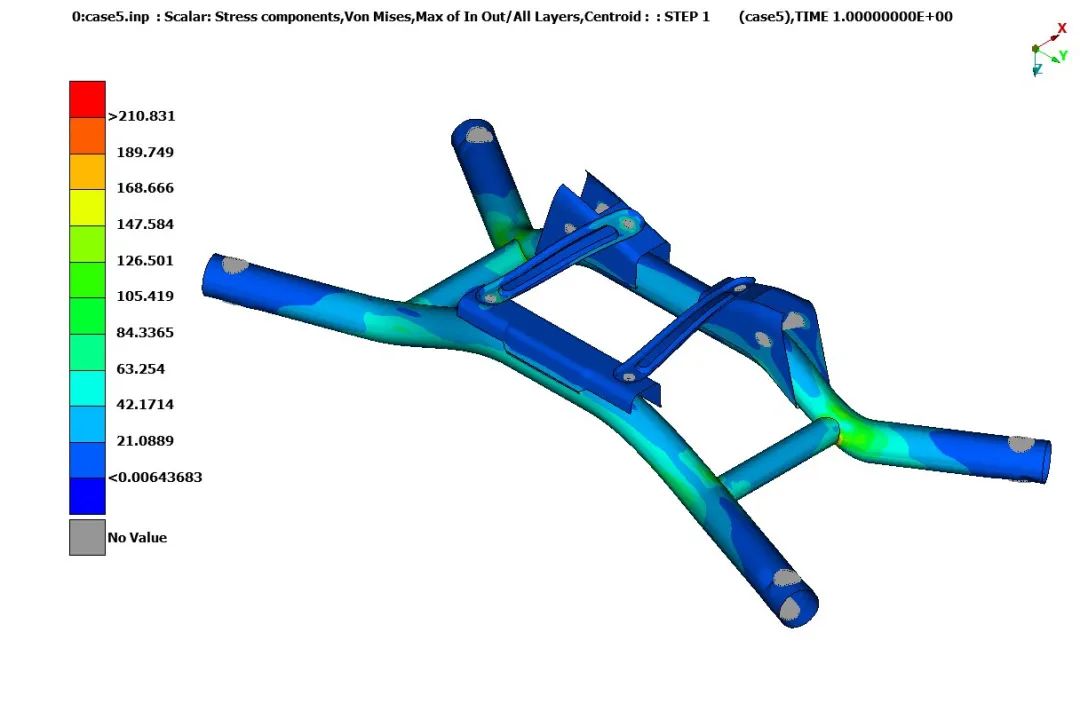
根據(jù)周邊部件的包絡(luò)確定拓?fù)湓O(shè)計(jì)空間,設(shè)置相應(yīng)目標(biāo)和約束,通過(guò)材料的堆積程度來(lái)識(shí)別重要路徑,對(duì)薄弱區(qū)域進(jìn)行針對(duì)性加強(qiáng)設(shè)計(jì),對(duì)性能貢獻(xiàn)程度低的區(qū)域進(jìn)行材料去除或厚度減薄設(shè)計(jì),做到材料利用最大化,在結(jié)構(gòu)性能提升的同時(shí)還能減輕重量。2.2 多目標(biāo)參數(shù)化優(yōu)化設(shè)計(jì) 概念設(shè)計(jì)階段確定拓?fù)浣Y(jié)構(gòu)形式后,在詳細(xì)設(shè)計(jì)階段需要對(duì)結(jié)構(gòu)斷面形式、材料厚度等進(jìn)行進(jìn)一步的細(xì)化設(shè)計(jì)。
3734 4 2
仿真客 ??? 3年前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
五連桿后懸除了運(yùn)動(dòng)副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉(zhuǎn)向節(jié)安裝點(diǎn)與副車(chē)架安裝點(diǎn)之間的距離,最終控制轉(zhuǎn)向節(jié)的最終姿態(tài)。多約束裝配不僅適用于五連桿后懸,也適用于其它各類(lèi)型的前后懸架。多約束裝配相比運(yùn)動(dòng)副建模求解速度快,建模簡(jiǎn)單等優(yōu)點(diǎn)。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
1-95基于matlab的多目標(biāo)優(yōu)化算法NSGA3 
基于matlab的多目標(biāo)優(yōu)化算法NSGA3,動(dòng)態(tài)輸出優(yōu)化過(guò)程,得到最終的多目標(biāo)優(yōu)化結(jié)果。數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買(mǎi)后可下載視頻中的源程序文件。
497
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于LS-DYNA的鉚接工藝多目標(biāo)優(yōu)化仿真 附ls-dyna_971_manual_k下載 
基于LS-DYNA的自穿刺鉚接多目標(biāo)優(yōu)化仿真可以有效地指導(dǎo)自穿刺鉚接工藝優(yōu)化設(shè)計(jì)。下載地址:ls-dyna_971_manual_k
3230 3
西瓜太郎. ??? 3年前
使用 Cadence CFD 和 Concepts NREC 對(duì)離心式壓縮機(jī)進(jìn)行多學(xué)科優(yōu)化 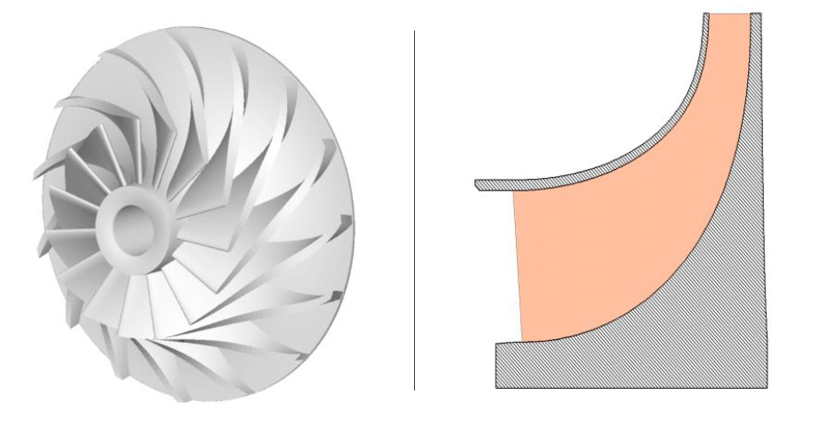
使用此分析,在啟動(dòng)優(yōu)化之前確認(rèn)替代模型的準(zhǔn)確性。首先, 探討了以可行范圍內(nèi)的效率和 von Mises 應(yīng)力等目標(biāo)為重點(diǎn)的多目標(biāo)優(yōu)化。作為優(yōu)化工作流程的第二步,單目標(biāo)優(yōu)化將階段效率作為目標(biāo),將 von Mises 應(yīng)力(設(shè)置為最大值)作為約束。設(shè)計(jì)過(guò)程中使用的工具優(yōu)化工作流程中使用的工具幾何設(shè)計(jì)和網(wǎng)格劃分參數(shù)化模型的生成在AxCent中進(jìn)行。
3182
Fidelity CFD ??? 2年前
Optistruct多工況優(yōu)化目標(biāo)函數(shù)如何進(jìn)行修正,以控制優(yōu)化結(jié)果 
本課適合哪些人學(xué)習(xí):1、optistruct拓?fù)?em>優(yōu)化設(shè)計(jì)人員2、理工科學(xué)子和老師3、學(xué)習(xí)型仿真工程師4、結(jié)構(gòu)優(yōu)化、參數(shù)化優(yōu)化,拓?fù)?em>優(yōu)化學(xué)習(xí)者你會(huì)得到什么:optistruct 多工況優(yōu)化目標(biāo)函數(shù)如何進(jìn)行修正,以控制優(yōu)化結(jié)果。
1161 1
張先 ??? 3年前
使用 COMSOL 實(shí)現(xiàn)多物理場(chǎng)拓?fù)?em>優(yōu)化的優(yōu)勢(shì) 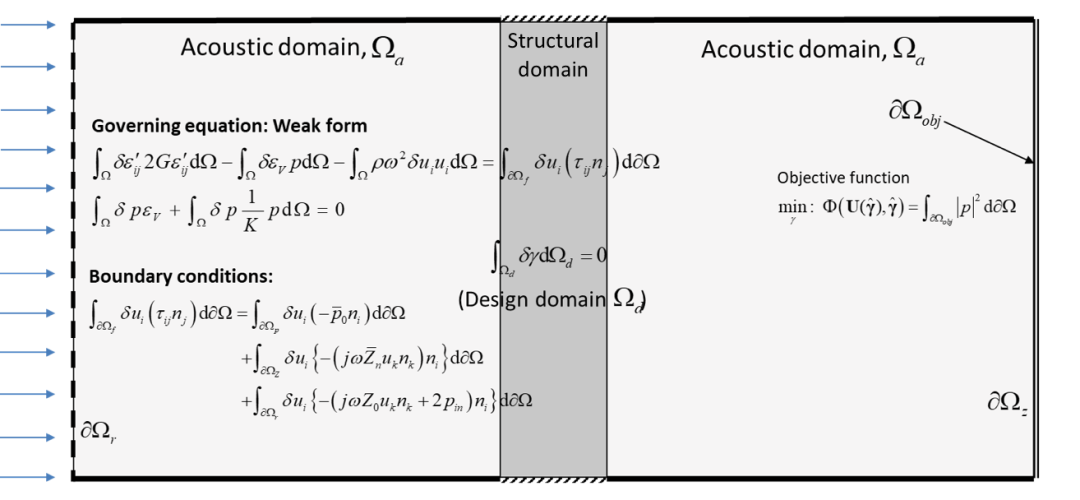
有限元系統(tǒng)方程包括設(shè)計(jì)變量和狀態(tài)變量,例如方程 (E);目標(biāo)函數(shù)和約束,例如方程(F); 和設(shè)計(jì)靈敏度分析,例如公式(G)。圖3. 為拓?fù)?em>優(yōu)化過(guò)程所需任務(wù)選擇的 COMSOL API 和 MATLAB? 代碼。COMSOL API 語(yǔ)法可以輕松方便地處理所需的任務(wù),無(wú)需多行復(fù)雜的代碼。
3670 4 1
我是小能 ??? 3年前
一文了解基于Motor-CAD的電機(jī)快速多學(xué)科設(shè)計(jì)與優(yōu)化 
效率和損耗map圖 峰值轉(zhuǎn)矩/轉(zhuǎn)速曲線 連續(xù)轉(zhuǎn)矩/轉(zhuǎn)速曲線 開(kāi)路和短路試驗(yàn) DQ 電感曲線計(jì)算 多工況銅損、鐵損、永磁體渦流損耗計(jì)算03電機(jī)多學(xué)科多目標(biāo)優(yōu)化設(shè)計(jì)利用Motor-CAD與optiSLang之間的接口可以方便的實(shí)現(xiàn)電機(jī)多學(xué)科、多工況、多目標(biāo)優(yōu)化設(shè)計(jì)。
3648 1
Ansys中國(guó) ??? 4年前
Optimus—多學(xué)科仿真集成與優(yōu)化設(shè)計(jì)平臺(tái) 
?? 優(yōu)化設(shè)計(jì) 具有完備的、經(jīng)驗(yàn)證的企業(yè)級(jí)優(yōu)化算法庫(kù)以及開(kāi)放的用戶優(yōu)化算法接口,適合求解設(shè)計(jì)參數(shù)、設(shè)計(jì)目標(biāo)和約束個(gè)數(shù)較多的復(fù)雜實(shí)際工程問(wèn)題,能實(shí)現(xiàn)基于代理模型快速優(yōu)化、基于仿真工作流優(yōu)化、可靠性優(yōu)化、多級(jí)別優(yōu)化和組合優(yōu)化。
2070
經(jīng)緯恒潤(rùn) ??? 4年前
20條/頁(yè) 
 441
441 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
