



OptiSystem 應用:激光雷達系統設計 
圖4測距儀(相移)布局3.測距(FMCW)?最后提出的方法是調頻連續波(FMCW)LIDAR。已經開發了兩種模型:直接檢測的FMCW LIDAR和相干檢測的FMCW LIDAR。兩種模式的工作原理相同。頻率調制的光發送器發送信號到目標,并且通過光電檢測器檢測反射信號并與原始線性調頻(LFM)信號混合。隨著接收信號的時延,產生中頻信號。
2266
追光ing ??? 8月前
[Optiwave] OptiSystem應用:激光雷達系統設計 ![[Optiwave] OptiSystem應用:激光雷達系統設計](https://img.jishulink.com/msimage/202509/d1f6261cd27efd5a2ea6acf7c034df32.png?image_process=resize,fw_294,fh_172,)
圖4.測距儀(相移)布局 3.測距(FMCW) 最后提出的方法是調頻連續波(FMCW)LIDAR。 已經開發了兩種模型:直接檢測的FMCW LIDAR和相干檢測的FMCW LIDAR。 兩種模式的工作原理相同。 頻率調制的光發送器發送信號到目標,并且通過光電檢測器檢測反射信號并與原始線性調頻(LFM)信號混合。 隨著接收信號的時延,產生中頻信號。
2378
信光嗎 ??? 8月前
OptiSystem應用:激光雷達系統設計 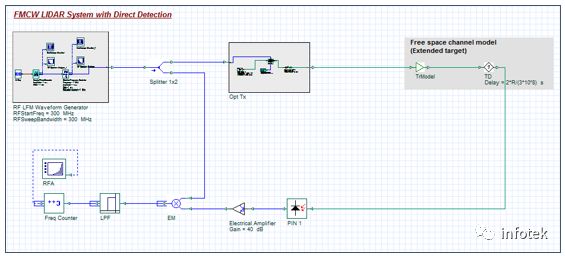
圖4.測距儀(相移)布局3.測距(FMCW) 最后提出的方法是調頻連續波(FMCW)LIDAR。 已經開發了兩種模型:直接檢測的FMCW LIDAR和相干檢測的FMCW LIDAR。 兩種模式的工作原理相同。 頻率調制的光發送器發送信號到目標,并且通過光電檢測器檢測反射信號并與原始線性調頻(LFM)信號混合。 隨著接收信號的時延,產生中頻信號。
2264
追光ing ??? 1年前
OptiSystem應用:激光雷達系統設計 
圖4.測距儀(相移)布局 3.測距(FMCW) 最后提出的方法是調頻連續波(FMCW)LIDAR。 已經開發了兩種模型:直接檢測的FMCW LIDAR和相干檢測的FMCW LIDAR。 兩種模式的工作原理相同。 頻率調制的光發送器發送信號到目標,并且通過光電檢測器檢測反射信號并與原始線性調頻(LFM)信號混合。 隨著接收信號的時延,產生中頻信號。
2337
追光ing ??? 2年前
康謀技術 | 毫米波雷達技術解析 
圖4 毫米波雷達組成(圖片來源于網絡)從技術角度來看,FMCW(Frequency Modulated Continuous Wave )調頻連續波雷達是現在的主流方案。相對于其他的波形調制技術而言,FMCW 可進行多目標探測,距離與速度探測,并可對目標進行連續追蹤,系統敏感性高且誤報率低。FMCW發送的是頻率隨時間變化的波形,通常是線性變化的,如圖5所示。
2369
康謀keymotek ??? 1年前
從原理到應用教你了解毫米波雷達 
如下圖1所示為FMCW (Frequency Modulated Continuous Wave)雷達主射頻組件的簡化框圖。
4544 1
無人機圈 ??? 2年前
五維智能感知——下一代光學的百年演進 
FMCW采用連續波式方案,通過測量反射光與參考光的拍頻來同時獲取距離和瞬時速度,具有抗干擾能力強、可直接測速等優勢。Aeva是FMCW激光雷達的代表企業,其芯片級FMCW方案已與多家車企合作。蘋果在FMCW方向亦有專利布局。兩條路線互補:SPAD dToF適合低功耗、中短距離應用;FMCW適合高精度、長距離、需測速的場景。
1578
威睛光學 ??? 1月前
便攜式超寬帶微波毫米波信號發生器 
能夠產生高質量的射頻/微波毫米波FMCW、脈沖調制信號,頻率覆蓋10MHz~6/20/40/67GHz。
2064
正弦波王莊 ??? 2年前
超表面與AOD級聯 | 實現激光雷達大視場角 
激光雷達的探測原理豐富,既有 ToF 這種較為直接的方式,也包括調幅、調頻連續波(AMCW、FMCW)等相對復雜的類型。若將其看作一個視覺系統,擁有寬廣的視野(大視場角 FOV)和快速的感知能力(高成像速度)是其理想的性能表現。超表面在激光雷達中的應用及局限超表面可通過表面的微納結構實現對光線的調控。
2297
武漢二元 ??? 9月前
一文了解面向無人駕駛感知系統的仿真驗證技術 
基于物理的毫米波雷達模型采用Ansys HFSS SBR+彈跳射線法,基于GPU加速的可以實現毫秒級的實時雷達仿真,包含FMCW和PDW兩種調制波形仿真以及多通道MIMO雷達仿真。通過對發射天線,接收天線和波形參數等三十多個參數的設置,可以表現出毫米波雷達回波損耗、腔體振蕩、表面散射,微多普勒效應等一系列物理現象,實現波形原始強度和相位信息、多普勒回波數據等數據輸出。
2606 2 1
Ansys中國 ??? 4年前
ACM通訊:自動駕駛“走”到哪了? 
Aurora表示,它已經設計了專有的傳感器FirstLight Lidar,使用頻率調制連續波(FMCW)LiDAR,可以看到前方四分之一英里(約400米)的地方,還可以即時測量車輛周圍物體的速度。Aurora表示,這項技術的使用為自動駕駛系統創造了更多的時間來進行剎車或安全操縱,特別是對于重型卡車。 與此同時,自動駕駛初創公司Waymo正專注于提供叫車服務。
1949
駕駛哥 ??? 4年前
2023CES自動駕駛盤點——卡車自動駕駛篇 
自2019年以來,Aeva和Plus一直在合作,用Aeva的調頻連續波(FMCW)4D激光雷達裝備和驗證Plus的自動卡車運輸解決方案。2021 11月Plus選擇了下一代傳感和感知系統的領導者Aeva為生產由PlusDrive系統驅動的無人駕駛和全自動卡車提供汽車級遠程4D激光雷達。
2367 1
駕駛哥 ??? 3年前
自動駕駛卡車最可能實現Level 4? 
Aurora 公司表示,他們已經設計了一款專有傳感器 FirstLight Lidar,它采用 FMCW(Frequency Modulated Continuous Wave)激光雷達,可以看到前方四分之一英里(約 400 米)處的情況,還可以即時測量車輛周圍物體的速度。這項技術的使用為自動駕駛系統提供了更多的時間來進行剎車或安全操作,尤其是重型自動駕駛卡車。
1808
木火柴 ??? 4年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
