



地表最強(qiáng)半導(dǎo)體封裝前處理 - Ansys Mechanical/Stacker Mesh Workflow 

第四單元:Underfill Fillet 建模與複雜曲面處理高階挑戰(zhàn):處理底層填膠 (Underfill) 溢料圓角的網(wǎng)格連續(xù)性。非規(guī)則幾何的 Stacker 實(shí)作技巧:如何將 Fillet 融入堆疊工作流。網(wǎng)格質(zhì)量診斷與優(yōu)化:針對封裝熱機(jī)模擬 (Thermal-mechanical) 的高品質(zhì)六面體網(wǎng)格最終檢查。
1421 2
鄭鈞 Adam ??? 4月前
Ansys Zemax光學(xué)設(shè)計(jì)軟件技術(shù)教程:眼科鏡片設(shè)計(jì) 
透鏡參數(shù)在光學(xué)設(shè)計(jì)上常使用的最小化Seidel斜向像散的方法可透過在OpticStudio的評價(jià)函數(shù)中加入ASTI操作數(shù)達(dá)成目的,此時(shí)我們將目標(biāo)值設(shè)為0、加大權(quán)重,並且使用單一波長。在縮小遠(yuǎn)點(diǎn)球面上最小模糊圈的方面,我們可以透過OpticStudio的預(yù)設(shè)優(yōu)化函數(shù)和光點(diǎn)半徑標(biāo)準(zhǔn)等功能達(dá)成目的。
2212
w**elab86_Swsp ??? 3年前
Fluent網(wǎng)格自適應(yīng)功能
此標(biāo)準(zhǔn)可以基于單元格寄存器值或表達(dá)式。使用下拉菜單選擇方法 Coarsening Criterion(粗化標(biāo)準(zhǔn)) Fluent用來確定何時(shí)對網(wǎng)格進(jìn)行粗化的準(zhǔn)則。此標(biāo)準(zhǔn)可以基于單元格寄存器值或表達(dá)式。
4980 4 4
CFD流體分析 ??? 4年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
然而,為了準(zhǔn)確地說明體積全像的特性,除了考慮繞射光線的傳播方向外,還必須考慮繞射效率、材料收縮或折射率變化等因素。考慮繞射效率使用戶能夠進(jìn)行圖像模擬和綜合優(yōu)化等高級分析。表面反射光柵與體積全像光柵的比較在介紹這個(gè)模型之前,我們先簡單解釋一下表面反射光柵(SRG)和體積全像光柵(VHG)的區(qū)別。
2121
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:智慧型手機(jī)鏡頭模組 
OpticStudio 中可用的表面類型範(fàn)圍,包括 Even 和 Q 型非球面,為設(shè)計(jì)人員提供了滿足規(guī)格的靈活性。雖然性能要求至關(guān)重要,但確保設(shè)計(jì)可以製造並在構(gòu)建時(shí)性能良好也同樣重要。這裡有許多考慮因素。可製造的特定鏡片形狀將受到限制。同樣,OpticStudio 提供了分析特性的能力,例如最大局部表面斜率,並在優(yōu)化過程中控制這些特性以確保最終的光學(xué)設(shè)計(jì)是可製造的。
2042
w**elab86_Swsp ??? 3年前
基于Ansys Fluent混合油導(dǎo)流仿真分析 
摘 要:本文運(yùn)用Ansys Fluent軟件對液體在導(dǎo)流片表面進(jìn)行流動可視化的仿真模擬,以此優(yōu)化導(dǎo)流片結(jié)構(gòu)來滿足設(shè)計(jì)要求。關(guān)鍵詞:浸出器;Fluent;分布槽;導(dǎo)流片;目前社會上的植物油品種眾多,除了如大豆油、菜籽油、花生油等大宗油,還有眾多小品種油如橄欖油、亞麻籽油等,其需求量也在隨著人類生活品質(zhì)的提高,而在不斷地增加。
3432 5 1
Infiniteelements ??? 2年前
ANSYS Fluent 壓縮機(jī)仿真|離心壓縮機(jī)計(jì)算 
2 計(jì)算流程 啟動Workbench,讀取文件 TurbochargerCompressorFluentStartingPoint.wbpz 添加Fluent模塊,計(jì)算模塊如下圖所示 雙擊 D2單元格進(jìn)入Fluent 3 Fluent計(jì)算
4417 1 1
我愛汽輪機(jī)仿真 ??? 2年前
一文讀懂Fluent并行計(jì)算,三大技術(shù)提升計(jì)算效率新境界! 
圖1:計(jì)算區(qū)域分區(qū)圖2:分區(qū)網(wǎng)格邊界 計(jì)算節(jié)點(diǎn)負(fù)責(zé)存儲并執(zhí)行部分網(wǎng)格的計(jì)算任務(wù),而位于分區(qū)邊界的單層重疊單元格層則負(fù)責(zé)跨分區(qū)邊界的通信(圖2)。盡管單元格和面被分割,但網(wǎng)格中的所有域和線程在每個(gè)計(jì)算節(jié)點(diǎn)上均存在鏡像(圖3)。線程以鏈接列表的形式存儲,和串行求解器保持一致。計(jì)算節(jié)點(diǎn)可在大規(guī)模并行計(jì)算機(jī)、多CPU 工作站或具備相同或多工作站組成的網(wǎng)絡(luò) 上實(shí)現(xiàn)。
3974
神工坊(高性能仿真) ??? 2年前
ZEMAX軟件技術(shù)應(yīng)用專題:用於數(shù)位元投影光學(xué)中均勻照明的陣列透鏡 (蒼蠅眼) 
這使得陣列中透鏡元件表面形狀的定義和優(yōu)化具有了極大的靈活性。下圖顯示了透鏡陣列1物體,它是由7 x 5個(gè)矩形透鏡組成的透鏡陣列,每個(gè)矩形透鏡都可以看作一個(gè)球面透鏡的矩形區(qū)域。其它可以用於該應(yīng)用程式的物體包括透鏡陣列2物件和六邊形透鏡陣列(Hexagonal Lenslet Array)物件。
2001
w**elab86_Swsp ??? 3年前
CFD軟件有哪些,應(yīng)該學(xué)哪一個(gè)? 
前處理:在fluent被ansys收購之后,ansys將tgrid模塊集成到了fluent中,因此fluent也具有劃分網(wǎng)格的功能。3. 求解器:基于非結(jié)構(gòu)化網(wǎng)格的通用CFD求解器,針對非結(jié)構(gòu)性網(wǎng)格模型設(shè)計(jì),是用有限體積法求解不可壓縮流及中度可壓縮流流場問題的CFD軟件。可應(yīng)用的范圍有湍流、熱傳、化學(xué)反應(yīng)、混合、旋轉(zhuǎn)流(rotating flow)及激波(shocks)等。
3694
神工坊(高性能仿真) ??? 3年前
2026 R1 | Ansys流體仿真專題網(wǎng)絡(luò)研討會上線(共7場) 
相較于傳統(tǒng)CFD仿真工具,Ansys Forte提供強(qiáng)大的自動化動網(wǎng)格、間隙控制模型、內(nèi)置閥門流固耦合仿真等行業(yè)專用仿真功能,解決各類容積式壓縮機(jī)、油泵、內(nèi)燃機(jī)等復(fù)雜運(yùn)動問題仿真的痛點(diǎn)問題。
1186
Ansys中國 ??? 1月前
ZEMAX軟件技術(shù)應(yīng)用專題:如何為光學(xué)相干斷層掃描系統(tǒng)建模 
模型系統(tǒng)健康人眼的角膜和虹膜(A)以及視網(wǎng)膜組織(B)的橫截面圖像如下所示。 顏色變化對應(yīng)於返迴光強(qiáng)度的變化。 這表明發(fā)生了重大變化。代表性的OCT系統(tǒng)如下所示。 光束應(yīng)均勻地分成兩臂,其中一個(gè)在樣品體積上會聚,以最小化給定掃描的照射面積。 光源應(yīng)為一束準(zhǔn)直的寬帶光束;大帶寬意味著低相干性和高精度定位產(chǎn)生相干性的深度。
2221
w**elab86_Swsp ??? 3年前
Moldex3D模流分析之螺桿分析模組 
基本上而言,為了執(zhí)行 ScrewPlus,您必須經(jīng)過從啟動 Moldex3D、建立新專案、匯入新網(wǎng)格、選取材料,然後進(jìn)入「加工精靈」設(shè)定製程條件的 Moldex3D 基本程序,如下圖所示。ScrewPlus 的關(guān)鍵功能位在「加工精靈」內(nèi)。
2202
Moldex3D 中國 ??? 1年前
五十四、Fluent網(wǎng)格自適應(yīng)詳細(xì)操作 
</p><p><br></p><p>List Criteria:單擊List Criteria,Fluent將會將要細(xì)化或粗化的單元格數(shù)量打印到控制臺</p><p><br></p><p><img src="https://mmbiz.qpic.cn/mmbiz_png/8tJMdLVYZyicibHF3DNIfSYVVRwNZs3SICNde4HWWcVibggMOvKDyoDpackOicckx1GqrBpkZXMxiczxcicrGXPjtSxw
3443 2
Fluent學(xué)習(xí)筆記 ??? 1年前
準(zhǔn)確性、收斂性和網(wǎng)格質(zhì)量 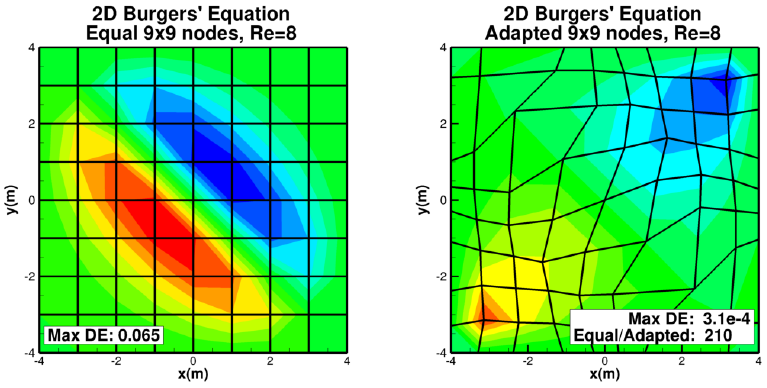
圖 1:一個(gè)簡單的演示,說明從單元幾何角度(右)來看,較差的網(wǎng)格如何比具有“完美”單元(左)的網(wǎng)格產(chǎn)生更低的離散化誤差。來自參考文獻(xiàn) 1c。弗吉尼亞理工大學(xué)的 Christopher Roy 教授展示了一個(gè)反直覺的例子(至少從先驗(yàn)指標(biāo)的角度來看),即 2D Burger 方程在自適應(yīng)網(wǎng)格(具有廣泛變化的傾斜、縱橫比和其他指標(biāo)的單元格)上的解與完美正方形網(wǎng)格上的解相比,離散化誤差要小得多。
3294
Fidelity CFD ??? 3年前
流體作用下彎曲管道單向流固耦合計(jì)算及濕模態(tài)分析 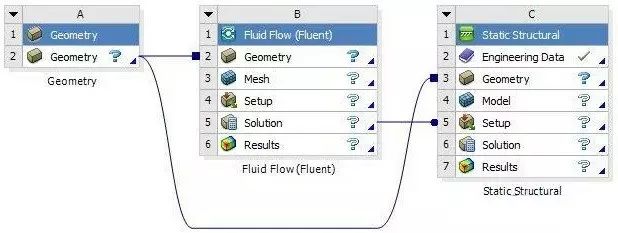
圖2 計(jì)算幾何模型圖3 DM中創(chuàng)建的幾何模型(既包含流體,也包含固體)3流體計(jì)算設(shè)置雙擊B3單元格進(jìn)行流體網(wǎng)格劃分。在mesh中進(jìn)行邊界命名,如圖4所示。采用掃描方式進(jìn)行網(wǎng)格劃分,采用網(wǎng)格尺寸為5mm,生成的流體計(jì)算網(wǎng)格如圖5所示。圖4 邊界命名圖5 流體計(jì)算網(wǎng)格返回至FLUENT中進(jìn)行流體計(jì)算設(shè)置。
4002
仿真客 ??? 3年前
流體作用下彎曲管道單向流固耦合計(jì)算及濕模態(tài)分析 
圖4 邊界命名圖5 流體計(jì)算網(wǎng)格返回至FLUENT中進(jìn)行流體計(jì)算設(shè)置。
3239 10 10
CFD流體分析 ??? 4年前
運(yùn)用CFD對汽車空調(diào)HVAC的改善設(shè)計(jì) 
為了解決此問題,在設(shè)計(jì)上需考慮在進(jìn)風(fēng)口處增加一個(gè)14 mm×14 mm的防鼠格,但又不能因?yàn)樵黾拥姆朗?em>格遮擋造成空調(diào)HVAC進(jìn)風(fēng)風(fēng)阻明顯下降及風(fēng)量降低。因此,運(yùn)用CFD進(jìn)行仿真模擬進(jìn)行對比分析。
3753
我愛汽輪機(jī)仿真 ??? 2年前
詳解航空燃油滑油3D打印熱交換器設(shè)計(jì)流程 附ANSYS CFX Tutorials R180下載 
來源:nTopology在圖11中,左圖描述了用于創(chuàng)建和導(dǎo)出網(wǎng)格的模塊,中間部分是熱交換器內(nèi)芯網(wǎng)格,右上方是帶有ANSYS Fluent作為格式選項(xiàng)的導(dǎo)出窗口。網(wǎng)格化完成后,可以將體積網(wǎng)格導(dǎo)出為ANSYS Fluent網(wǎng)格(CFD網(wǎng)格文件類型可從nTop 平臺獲取),然后導(dǎo)入ICEM CFD*。
2950 1 1
花千骨 ??? 4年前
marc焊接仿真二次開發(fā)-以幾何位置激活生死單元的方法?
這樣在遍歷單元格時(shí)很容易判斷所遍歷的單元生死狀態(tài),但對模型分網(wǎng)的網(wǎng)格單元號是有要求的。二次開發(fā)指南上網(wǎng)格單元號沿焊接路徑方向有規(guī)律增加。可是對于不在marc上建模分網(wǎng)的焊接模型,網(wǎng)格號很難滿足上述要求。此時(shí)想用遍歷單元與移動的熱源中心相對位置來決定是否激活單元。
2655
斯維爾德洛夫 ??? 2年前
20條/頁 
跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
