



小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
Adams和Matlab的聯(lián)合仿真可實(shí)現(xiàn)這一過(guò)程。整個(gè)過(guò)程中Adams虛擬樣機(jī)作為被控制對(duì)象,需要從Matlab中獲得驅(qū)動(dòng)數(shù)據(jù)。Matlab則需要虛擬樣機(jī)的實(shí)現(xiàn)狀態(tài)來(lái)調(diào)整控制程序。在相同的關(guān)節(jié)輸出力矩的情況下,腿的質(zhì)量/轉(zhuǎn)動(dòng)慣量越小,則被控響應(yīng)速度越快。機(jī)器人在從高處下落這種情況時(shí),腿著地瞬間,關(guān)節(jié)速度瞬間突變。如機(jī)器人腿的轉(zhuǎn)動(dòng)慣量過(guò)大,將會(huì)給腿連桿產(chǎn)生較大的沖擊力矩,而損壞腿或足。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
Adams剛體動(dòng)力學(xué)復(fù)現(xiàn)問(wèn)題?
在Adams中建立了如下剛體模型 并施加了隨物體運(yùn)動(dòng)的繞質(zhì)心x、y、z的外力矩10000NM,計(jì)算得到的結(jié)果與matlab編寫(xiě)算例得到的結(jié)果不一致。
1529
jer_chou ??? 10月前
底盤(pán)Adams仿真模擬 附adams板簧工具下載 
主銷(xiāo)內(nèi)傾外傾角度都要去和該輪胎模擬,有了最佳的回正力矩、轉(zhuǎn)向力矩后才能確定內(nèi)外傾角度。在賽車(chē)制動(dòng)時(shí),整車(chē)重心會(huì)落在前輪,導(dǎo)致后輪的制動(dòng)效果減小,所以四輪載荷分配上要合理。
4274 25 20
學(xué)無(wú)止境. ??? 3年前
刮板輸送機(jī)過(guò)彎曲段工況下力學(xué)特性研究 
圖2 中部槽ADAMS仿真效果圖 仿真過(guò)程中液壓推桿加速推進(jìn),仿真結(jié)束時(shí)間為0.12 s,中部槽推進(jìn)距離共500 mm。液壓推桿向前推動(dòng)中部槽的過(guò)程中,先被推動(dòng)的中部槽利用啞鈴銷(xiāo)把力和力矩傳遞給后面與其相連接的中部槽,然后慢慢帶動(dòng)后面相鄰的中部槽運(yùn)動(dòng)。仿真最終結(jié)果如圖3所示。
2394 8
擺渡人張 ??? 2年前
基于UG NX的錘片式粉碎機(jī)的三維建模及運(yùn)動(dòng)仿真教程 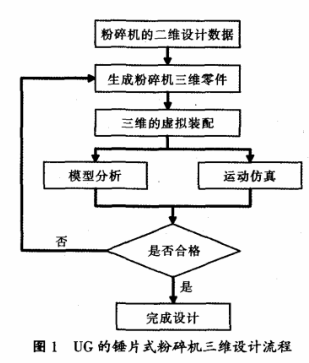
有限元分析的步驟:創(chuàng)建解法;對(duì)需要理想化的幾何體(如對(duì)稱結(jié)構(gòu))進(jìn)行理想化;設(shè)置錘片的材料屬性;給錘片施加約束與載荷;劃分網(wǎng)格;有限元模型檢查;解算;進(jìn)入后處理。錘片的有限元后處理如圖12、圖13所示。4 運(yùn)動(dòng)仿真運(yùn)動(dòng)仿真模塊可以進(jìn)行機(jī)構(gòu)的干涉分析,跟蹤零件的運(yùn)動(dòng)軌跡,分析機(jī)構(gòu)中零件的速度、加速度、作用力、反作用力和力矩等。
3144 10 3
張偉一 ??? 3年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
