



內(nèi)含仿真視頻 | 《機(jī)器人&家用電器&斷路器仿真案例集》現(xiàn)已開(kāi)放領(lǐng)取 
1 基于人體模型的可穿戴機(jī)器人設(shè)計(jì)與仿真2 洗衣機(jī)脫水的振動(dòng)特性和減震裝置的效果3 在初期研發(fā)階段對(duì)不同斷路器產(chǎn)品概念進(jìn)行測(cè)試二、本期資料如何獲取?掃碼關(guān)注“上海安世亞太”后臺(tái)回復(fù)“經(jīng)典案例”即可獲得完整版資料冊(cè)資料將在1-3個(gè)工作日內(nèi)發(fā)送至您的郵箱三、怎樣獲取更多資料?
2021
上海安世亞太 ??? 2年前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
借助仿真方法,可以在物理樣機(jī)制造之前,對(duì)機(jī)器人的重要部件進(jìn)行早期評(píng)估和檢查,從而大幅降低研發(fā)的時(shí)間和成本。ITRI成立于1973年,是一家技術(shù)研發(fā)機(jī)構(gòu),將RecurDyn的虛擬樣機(jī)技術(shù)應(yīng)用于多關(guān)節(jié)機(jī)器人的開(kāi)發(fā)過(guò)程中。ITRI利用RecurDyn可以設(shè)計(jì)控制機(jī)器人運(yùn)動(dòng)的控制器,包括電機(jī)、軸承和減速器等各種機(jī)器人的部件。
2608 1 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 3年前
自主水下航行器 (AUV) | 近實(shí)時(shí)仿真與控制助力實(shí)現(xiàn)水下機(jī)動(dòng)航行 
目前,他擔(dān)任瑞典海洋機(jī)器人中心 (SMaRC) 的首席研究員,該中心是瑞典在水下航行器領(lǐng)域投資最大的學(xué)術(shù)項(xiàng)目。 Sriharsha Bhat 擁有新加坡國(guó)立大學(xué)機(jī)械工程學(xué)士學(xué)位和瑞典皇家理工學(xué)院車輛工程碩士學(xué)位。目前,他是瑞典皇家理工學(xué)院的博士生。他的研究領(lǐng)域包括水下機(jī)器人的建模、控制和規(guī)劃,主攻方向是水下機(jī)器人在現(xiàn)實(shí)場(chǎng)景中的部署。
3067 3 2
泡沫oO ??? 2年前
RecurDyn成功案例:基于仿真設(shè)計(jì)的多關(guān)節(jié)機(jī)器人 
借助仿真方法,可以在物理樣機(jī)制造之前,對(duì)機(jī)器人的重要部件進(jìn)行早期評(píng)估和檢查,從而大幅降低研發(fā)的時(shí)間和成本。ITRI成立于1973年,是一家技術(shù)研發(fā)機(jī)構(gòu),將RecurDyn的虛擬樣機(jī)技術(shù)應(yīng)用于多關(guān)節(jié)機(jī)器人的開(kāi)發(fā)過(guò)程中。ITRI利用RecurDyn可以設(shè)計(jì)控制機(jī)器人運(yùn)動(dòng)的控制器,包括電機(jī)、軸承和減速器等各種機(jī)器人的部件。
2529
杭州擬創(chuàng)(RecurDyn原廠) ??? 2年前
戴西CAxWorks.VPG車輛工程仿真軟件|假人+座椅雙調(diào)整 汽車仿真效率直接拉滿 
以下六大維度展示了 VPG 區(qū)別于其他工具的核心競(jìng)爭(zhēng)力:1多求解器格式支持原生支持 LS-DYNA、RADIOSS、PAM-CRASH、Abaqus等主流求解器格式,無(wú)縫嵌入現(xiàn)有仿真工具鏈。2批處理自動(dòng)化內(nèi)置 Python 腳本接口與命令行模式,支持用戶定制及批處理自動(dòng)化。
1380
工程師小戴 ??? 1月前
戴西CAxWorks.VPG車輛工程仿真軟件|假人+座椅雙調(diào)整 汽車仿真效率直接拉滿
以下六大維度展示了 VPG 區(qū)別于其他工具的核心競(jìng)爭(zhēng)力:1多求解器格式支持原生支持 LS-DYNA、RADIOSS、PAM-CRASH、Abaqus等主流求解器格式,無(wú)縫嵌入現(xiàn)有仿真工具鏈。2批處理自動(dòng)化內(nèi)置 Python 腳本接口與命令行模式,支持用戶定制及批處理自動(dòng)化。
2066 1
工程師小戴 ??? 1月前
RecurDyn機(jī)器人仿真應(yīng)用及核心技術(shù)路線詳解 
,其目標(biāo)是在已知機(jī)器人末端執(zhí)行器目標(biāo)位置(及姿態(tài))的前提下,反解出各關(guān)節(jié)所需達(dá)到的角度(或位移)。
2383 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 4月前
載人登月航天器推進(jìn)系統(tǒng)方案選擇分析 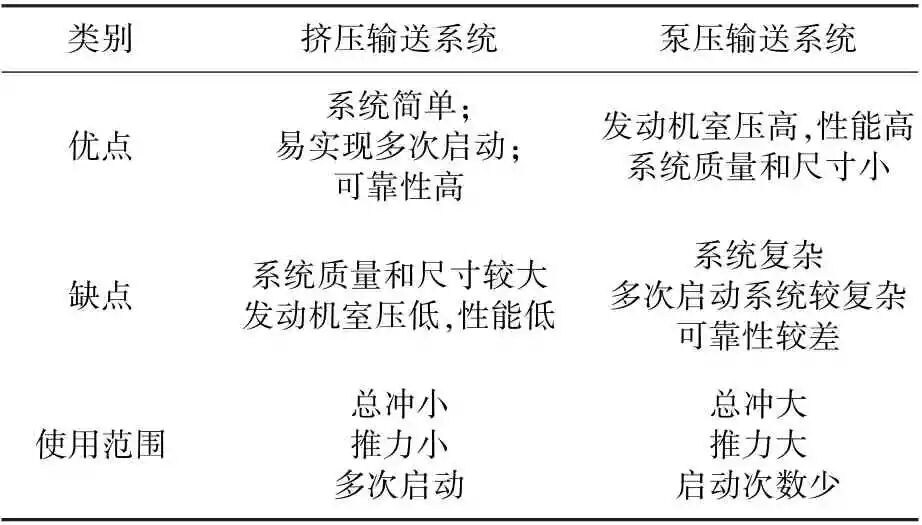
摘要:載人登月航天器完成近月制動(dòng)和著陸下降等空間任務(wù),需要裝載大量推進(jìn)劑,推進(jìn)系統(tǒng)方案選擇是航天器總體方案設(shè)計(jì)優(yōu)化的重要組成部分。建立了推進(jìn)系統(tǒng)關(guān)鍵組件設(shè)計(jì)仿真模型,仿真分析了推進(jìn)系統(tǒng)質(zhì)量和干重系數(shù)隨推進(jìn)劑裝載量的變化規(guī)律,并對(duì)比了20 t級(jí)載人登月航天器擠壓和泵壓推進(jìn)系統(tǒng)方案。
2607 1
航模無(wú)人機(jī)干貨分享 ??? 3年前
小米發(fā)布仿生四足機(jī)器人“鐵蛋”!解讀背后的建模和仿真技術(shù) 
機(jī)器人在從高處下落這種情況時(shí),腿著地瞬間,關(guān)節(jié)速度瞬間突變。如機(jī)器人腿的轉(zhuǎn)動(dòng)慣量過(guò)大,將會(huì)給腿連桿產(chǎn)生較大的沖擊力矩,而損壞腿或足。尤其是如果采用較高減速比的減速器來(lái)驅(qū)動(dòng)關(guān)節(jié),那么電機(jī)轉(zhuǎn)子本身的轉(zhuǎn)動(dòng)慣量等效到腿關(guān)節(jié)上后將會(huì)很大,使得在關(guān)節(jié)速度突變這種情況下,很容易損壞減速器。
2920
深圳北鯤云計(jì)算有限公司 ??? 3年前
數(shù)字孿生作為國(guó)際競(jìng)爭(zhēng)的決定性優(yōu)勢(shì) 
自動(dòng)化工廠需要完整的數(shù)字化產(chǎn)品數(shù)據(jù)才行運(yùn)行 — 這些數(shù)據(jù)是生產(chǎn)過(guò)程中仿真模擬、虛擬調(diào)試及構(gòu)建數(shù)字孿生的基礎(chǔ)。 數(shù)字孿生(Digital Twins) 即物理產(chǎn)品、機(jī)器設(shè)備或整套設(shè)施的虛擬映射。 除純粹的幾何數(shù)據(jù)外,還需搭載智慧附加資訊,才能將三維模型轉(zhuǎn)化為功能齊全的數(shù)位化產(chǎn)物。
2327
cadenas ??? 4月前
自動(dòng)駕駛車輛仿真模擬軟件盤點(diǎn) 附車輛工程仿真下載 
4.插件可開(kāi)發(fā)機(jī)器人,傳感器和環(huán)境控制的自定義插件。插件可直接訪問(wèn)Gazebo的API。 5.機(jī)器人模型提供了許多機(jī)器人,包括PR2,Pioneer2 DX,iRobotCreate和TurtleBot。 或者使用SDF構(gòu)建你自己的。 6.命令行工具廣泛的命令行工具有利于模擬內(nèi)省和控制。
4126 1 1
飛飛麗麗 ??? 4年前
光學(xué)仿真干貨丨Lumerical納米線柵偏振器仿真應(yīng)用 
SPEOS Ansys SPEOS是Ansys公司開(kāi)發(fā)功能強(qiáng)大的專業(yè)用于光學(xué)設(shè)計(jì)、環(huán)境與視覺(jué)模擬系統(tǒng)、成像應(yīng)用的光學(xué)仿真軟件, 強(qiáng)大的解決方案提供完美的可視化光學(xué)系統(tǒng),和直觀的人機(jī)交互平臺(tái),其仿真技術(shù)已經(jīng)廣泛用于航空, 航天, 軍工,汽車,軌道交通、通用照明等工業(yè)領(lǐng)域的研究機(jī)構(gòu)和知名公司,是全球少有的可依據(jù)人眼視覺(jué)特征和材料真實(shí)光學(xué)屬性進(jìn)行的場(chǎng)景仿真的專業(yè)軟件。
2818
w**elab86_Swsp ??? 3年前
《基于 ABAQUS 的桁架機(jī)器人模態(tài)分析》 
再根據(jù)前 面進(jìn)行仿真的相關(guān)設(shè)置在 ABAQUS 中進(jìn)行線性攝動(dòng) 的分析步驟后提交作業(yè),在有限元模型中進(jìn)行后處 理,得出桁架機(jī)器人的前十階固有頻率及振型[9]。固 有頻率如表 2 所示,振型云圖如圖 6 所示。 觀察圖 6 可知,在大多數(shù)固有頻率作用下,桁 架機(jī)器人的末端執(zhí)行器振動(dòng)都比較明顯,而末端執(zhí) 行器正是桁架機(jī)器人在整個(gè)運(yùn)輸碼垛工作過(guò)程中 最為關(guān)鍵的部件。
3091 2
CAEer吳皓 ??? 2年前
Ansys Speos | 智能手環(huán)心率傳感器仿真 
它可以在單個(gè)求解器內(nèi)快速準(zhǔn)確地分析剛體和柔體。本例模擬了一個(gè)人類手臂朝東方擺動(dòng)的場(chǎng)景。在手臂運(yùn)動(dòng)的過(guò)程中,智能手環(huán)會(huì)隨之滑動(dòng)。智能手環(huán)與人類手腕之間的相對(duì)位移將被輸出到Speos。為了簡(jiǎn)化問(wèn)題,在智能手環(huán)位移仿真中,將人的手腕建模為剛體。在此步驟中忽略組織的變形。通過(guò)Motion仿真,可以導(dǎo)出智能手環(huán)的相對(duì)位移。
2566 1
宇熠科技 ??? 1年前
2024年RecurDyn優(yōu)秀案例競(jìng)賽作品分享:核探測(cè)機(jī)器人底盤設(shè)計(jì)與越障性能仿真驗(yàn)證 
該機(jī)器人搭載多種探測(cè)傳感器并對(duì)關(guān)鍵驅(qū)控部分進(jìn)行了輻射屏蔽,可在強(qiáng)輻射環(huán)境下完成探查、巡檢作業(yè);該機(jī)器人的履帶移動(dòng)底盤設(shè)計(jì)采用驅(qū)動(dòng)輪與地面具有一定角度的離地角同時(shí)使誘導(dǎo)輪接地的方法以保證機(jī)器人具有較好的越障性能和地形適應(yīng)能力;底盤設(shè)計(jì)了減震結(jié)構(gòu)以減少機(jī)器人震動(dòng)對(duì)探測(cè)器造成的影響。
2556
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
報(bào)名 | 聚焦行業(yè):Ansys光學(xué)系統(tǒng)仿真在顯示器行業(yè)中的應(yīng)用 
4月29日,原定活動(dòng) “Ansys optiSLang, Lumerical和Speos聯(lián)合仿真實(shí)現(xiàn)顯示器設(shè)計(jì)優(yōu)化” 將全面升級(jí)為『聚焦行業(yè):Ansys光學(xué)系統(tǒng)仿真在顯示器行業(yè)中的應(yīng)用』專題網(wǎng)絡(luò)研討會(huì),本次活動(dòng)將展示如何通過(guò) Ansys Lumerical STACK設(shè)計(jì)的微觀結(jié)構(gòu)來(lái)仿真顯示器;如何通過(guò)Speos分析典型環(huán)境中整個(gè)宏觀顯示器的發(fā)光表現(xiàn);以及在 Ansys optiSLang 的幫助下
2500
Ansys中國(guó) ??? 4年前
淺析無(wú)人機(jī)仿真技術(shù) 
這種仿真試驗(yàn)要求有相應(yīng)的形成人感覺(jué)環(huán)境的各種物理效應(yīng)設(shè)備。而飛行器等被控對(duì)象的動(dòng)態(tài)特性仍通過(guò)建立的數(shù)學(xué)模型在計(jì)算機(jī)上實(shí)現(xiàn)。這種仿真試驗(yàn)?zāi)軐?duì)飛行器性能、回路中操作人員的技能和素質(zhì)、或者整個(gè)人機(jī)系統(tǒng)作出評(píng)價(jià)。人在回路中的仿真也必須實(shí)時(shí)進(jìn)行。
4688
無(wú)人機(jī)圈 ??? 2年前
如何選擇合適的電磁場(chǎng)仿真算法 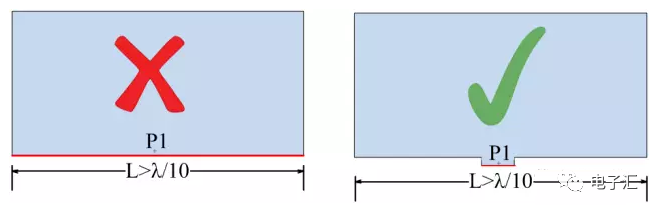
EMX中2D和3D模式對(duì)同一電感的仿真結(jié)果,由于2D模式忽略了側(cè)邊電容,因此自諧振頻率更高。 3D和2.5D我們有時(shí)候會(huì)說(shuō)3D層狀結(jié)構(gòu),有時(shí)候又會(huì)說(shuō)2.5D。那什么是2.5D呢?實(shí)際上這是一個(gè)非常含糊的概念。我在查資料時(shí)在EDABoard論壇中發(fā)現(xiàn)了一篇有趣的帖子。有人提問(wèn)2.5D和3D電磁場(chǎng)仿真的區(qū)別,結(jié)果“2.5D”這個(gè)概念的發(fā)明者、電磁場(chǎng)軟件SONNET的創(chuàng)始人J.C.
3150 10 2
仿真客 ??? 3年前
活動(dòng)報(bào)名 | 攪拌器仿真技術(shù)應(yīng)用專題研討會(huì) 
會(huì)議議程13:00-13:30 來(lái)賓簽到13:30-13:35 主持人介紹13:35-14:30 攪拌器工作過(guò)程數(shù)值仿真解決方案與您分享上海安世亞太在攪拌器領(lǐng)域長(zhǎng)期項(xiàng)目實(shí)踐和經(jīng)驗(yàn)積累基礎(chǔ)上形成的整體解決方案,開(kāi)放探討,現(xiàn)場(chǎng)論道。
2017 1
上海安世亞太 ??? 2年前
軟體機(jī)器人超彈性材料本構(gòu)賦予的兩種實(shí)現(xiàn)方式 
本文將圍繞這兩種方式,結(jié)合 Abaqus 仿真全流程(建模、參數(shù)設(shè)置、分析步、相互作用等),詳細(xì)闡述實(shí)現(xiàn)邏輯、操作要點(diǎn)及結(jié)果對(duì)比,為軟體機(jī)器人的超彈性仿真提供可復(fù)現(xiàn)的技術(shù)方案。
3319 18 8
Abaqus_JUN ??? 7月前
20條/頁(yè) 
 57
57 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
