



OptiSystem 應(yīng)用:激光雷達系統(tǒng)設(shè)計 
簡介:激光探測和測距系統(tǒng)(LIDAR)以下四個示例設(shè)計演示了如何使用OptiSystem模擬光檢測和測距系統(tǒng)(LIDAR),具體如下:?激光脈沖飛行時間測量?相移測距?調(diào)頻連續(xù)波(FMCW)直接檢測測距和調(diào)頻連續(xù)波相干測距圖1使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖1.測距(飛行時間)1)原理簡介?使用激光脈沖,飛行時間測距法測量發(fā)射脈沖從發(fā)射裝置行進到目標并返回接收器所花費的時間
2265
追光ing ??? 8月前
[Optiwave] OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計 ![[Optiwave] OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計](https://img.jishulink.com/msimage/202509/d1f6261cd27efd5a2ea6acf7c034df32.png?image_process=resize,fw_294,fh_172,)
簡介:激光探測和測距系統(tǒng)(LIDAR) 以下四個示例設(shè)計演示了如何使用OptiSystem模擬光檢測和測距系統(tǒng)(LIDAR),具體如下: □ 激光脈沖飛行時間測量 □ 相移測距 □ 調(diào)頻連續(xù)波(FMCW)直接檢測測距和調(diào)頻連續(xù)波相干測距 圖1.使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖 1.測距(飛行時間
2378
信光嗎 ??? 8月前
OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計 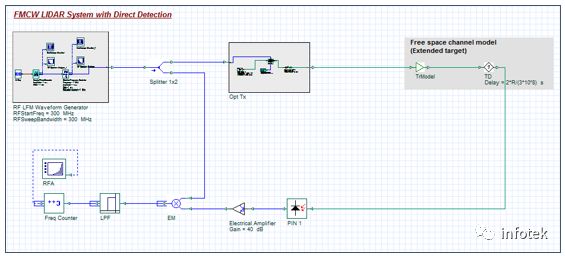
簡介:激光探測和測距系統(tǒng)(LIDAR) 以下四個示例設(shè)計演示了如何使用OptiSystem模擬光檢測和測距系統(tǒng)(LIDAR),具體如下: 激光脈沖飛行時間測量相移測距調(diào)頻連續(xù)波(FMCW)直接檢測測距和調(diào)頻連續(xù)波相干測距圖1.使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖 1.測距(飛行時間) 原理簡介 使用激光脈沖,飛行時間測距法測量發(fā)射脈沖從發(fā)射裝置行進到目標并返回接收器所花費的時間
2264
追光ing ??? 1年前
OptiSystem應(yīng)用:激光雷達系統(tǒng)設(shè)計 
簡介:激光探測和測距系統(tǒng)(LIDAR) 以下四個示例設(shè)計演示了如何使用OptiSystem模擬光檢測和測距系統(tǒng)(LIDAR),具體如下: 激光脈沖飛行時間測量相移測距調(diào)頻連續(xù)波(FMCW)直接檢測測距和調(diào)頻連續(xù)波相干測距 圖1.使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖 1.測距(飛行時間) 原理簡介 使用激光脈沖,飛行時間測距法測量發(fā)射脈沖從發(fā)射裝置行進到目標并返回接收器所花費的時間
2337
追光ing ??? 2年前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計 
圖2 OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中)對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。通過使用相移分量來應(yīng)用薩格納克相移,計算如下:在這里,我們根據(jù)前面的方程,使用C ++組件來計算角速度。
2145
追光ing ??? 8月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計 
圖2.OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中) 對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。 I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。
1873
信光嗎 ??? 8月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計 
圖2.OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中) 對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。 I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。
1557
信光嗎 ??? 9月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計
圖2 OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中)對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。通過使用相移分量來應(yīng)用薩格納克相移,計算如下:在這里,我們根據(jù)前面的方程,使用C ++組件來計算角速度。
1762
追光ing ??? 9月前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計
圖2 OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中)對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。通過使用相移分量來應(yīng)用薩格納克相移,計算如下:在這里,我們根據(jù)前面的方程,使用C ++組件來計算角速度。
2402
追光ing ??? 1年前
OptiSystem應(yīng)用:光纖陀螺儀系統(tǒng)設(shè)計 
圖2.OptiSystem設(shè)計的調(diào)制技術(shù)原理圖(資料來源:REF)(注:光纖偏振器未包含在設(shè)計中) 對于以下的OptiSystem設(shè)計,角速度已設(shè)置為7.27e-5rad / s(地球的轉(zhuǎn)速)。I-FOG的設(shè)置顯示在紅色框中(在全局參數(shù)下)。通過使用相移分量來應(yīng)用薩格納克相移,計算如下: 在這里,我們根據(jù)前面的方程,使用C ++組件來計算角速度。
2331
追光ing ??? 2年前
基于optisystem的EDFA通信系統(tǒng)設(shè)計 
OptiSystem允許對物理層任何類型的虛擬光連接和寬帶光網(wǎng)絡(luò)的分析,從遠距離通訊到MANS和LANS都適用。它的廣泛應(yīng)用包括:物理層的器件級到系統(tǒng)級的光通訊系統(tǒng)設(shè)計;CATV或者TDM∕WDM網(wǎng)絡(luò)設(shè)計;SONET∕SDH的環(huán)形設(shè)計;傳輸器、信道、放大器和接收器的設(shè)計;色散圖設(shè)計;不同接受模式下誤碼率(BER)和系統(tǒng)代價(penalty)的評估;放大的系統(tǒng)BER和連接預算計算。
2407
320科技工作室 ??? 3月前
Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統(tǒng)建模(上) 
前言 在消費類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達實現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達系統(tǒng)的應(yīng)用非常廣泛而且截然不同,但是 “閃光激光雷達” 解決方案通常都適用于在使用固態(tài)光學元件的目標場景中生成可檢測的點陣列。憑借具有針對小型封裝結(jié)構(gòu)但可獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達系統(tǒng)在智能手機和筆記本電腦等消費類電子產(chǎn)品中日益普及。
2129
宇熠科技 ??? 3年前
Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統(tǒng)建模(中) 
在消費類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達實現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達系統(tǒng)的應(yīng)用非常廣泛而且截然不同,但是 “閃光激光雷達” 解決方案通常都適用于在使用固態(tài)光學元件的目標場景中生成可檢測的點陣列。憑借具有針對小型封裝結(jié)構(gòu)但可獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達系統(tǒng)在智能手機和筆記本電腦等消費類電子產(chǎn)品中日益普及。
2036 1
宇熠科技 ??? 3年前
一文讀懂汽車芯片--激光雷達及車規(guī)AEC-Q102認證 
1.產(chǎn)品采用的所有電子元器件均為車規(guī)級(AEC-Q*** Qualified);2.產(chǎn)品滿足汽車電子設(shè)計開發(fā)要求;3.產(chǎn)品滿足大型車企的測試要求;4.產(chǎn)品實現(xiàn)批量前裝(量小的車型不算,半前裝或后裝都不算);2激光雷達電子元器件分析激光雷達產(chǎn)品里面電子元器件應(yīng)用的標準: AEC-Q102是專門針對激光雷達的核心器件激光器和光電探測器而制定的新標準,
2319
falab ??? 2年前
Ansys Zemax | 使用OpticStudio進行閃光激光雷達系統(tǒng)建模(下) 
在消費類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達實現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達系統(tǒng)的應(yīng)用非常廣泛而且截然不同,而“閃存激光雷達”解決方案適用于在使用固態(tài)光學元件的目標場景中生成可檢測的點陣列。 憑借在針對小型封裝獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達系統(tǒng)在智能手機和筆記本電腦等消費類電子產(chǎn)品中日益普及。
2350 1 1
宇熠科技 ??? 3年前
經(jīng)緯恒潤激光雷達集成系統(tǒng)全面提升激光雷達的使用體驗 
汽車自動駕駛系統(tǒng)通常可分為感知層、決策層、執(zhí)行層,以激光雷達、攝像頭為代表的傳感器是自動駕駛感知層不可或缺的組成部分,但在傳感器整車集成方面,主機廠卻面臨著幾大痛點:· 固定且外凸的激光雷達會給造型的美觀程度以及整車空氣動力學設(shè)計帶來很大的挑戰(zhàn)· 復雜惡劣天氣環(huán)境下,激光雷達鏡面容易因受干擾而無法在最佳狀態(tài)下運行· 激光雷達做為高單價傳感器存在較大的被盜風險 經(jīng)緯恒潤自主研發(fā)的激光雷達集成系統(tǒng)可以為傳感器集成提供智能化的解決方案
2191
經(jīng)緯恒潤 ??? 3年前
基于optisystem的光發(fā)送機的設(shè)計和仿真 
圖2 外調(diào)制激光發(fā)射機1.2 光發(fā)送機模型設(shè)計 設(shè)計目的通過本設(shè)計實例,我們對鈮酸鋰Mach-Zehnder調(diào)制器中的外加電壓和調(diào)制器輸出信號的啁啾量的關(guān)系進行了模擬和分析,從而決定具體應(yīng)用中MZ調(diào)制器的外置偏壓的分布和大小。 原理簡介對于處于直接強度調(diào)制狀態(tài)下的單縱模激光器,其載流子濃度的變化是隨注入電流的變化而變化。
2798
320科技工作室 ??? 4年前
如何正確使用激光雷達 
國內(nèi)外的激光雷達廠商也在這方面也做了相關(guān)設(shè)計,比如法雷奧的everView傳感器清潔系統(tǒng),據(jù)悉該系統(tǒng)每次清潔僅需25毫升清潔液,而其他手動清潔系統(tǒng)在使用時每次需要100毫升清潔液。華為在發(fā)布其首款激光雷達產(chǎn)品時,也公布了自主設(shè)計的智能清洗風洞系統(tǒng),可實現(xiàn)在130km/h行駛狀態(tài)下激光雷達的清洗功能。
2203
駕駛哥 ??? 4年前
激光雷達超遠距離測距技術(shù) 
得出在高動態(tài)環(huán)境下,相對速度與測距周期、雙方鐘差共同作用產(chǎn)生測距系統(tǒng)誤差,且速度越大系統(tǒng)誤差越大的結(jié)論。設(shè)計測距通信一體化演示驗證平臺,完成測距通信算法的軟硬件評估,實測結(jié)果與理論推導相符,為后續(xù)新體制激光雷達原理樣機研制奠定技術(shù)基礎(chǔ)。引 言掌握航天器交會對接技術(shù)是一個國家建立長期無人在軌運行、短期有人照料的載人空間試驗平臺的首要任務(wù)。
1077
威睛光學 ??? 2月前
問激光雷達紛爭誰主沉浮?尚無定論,仍需協(xié)作 
作為激光雷達系統(tǒng)供應(yīng)商,亮道智能認為,不同技術(shù)路線的激光雷達有各自的優(yōu)缺點,需要綜合配比,有些技術(shù)路線適合做中長距甚至超長距,有的技術(shù)路線偏向中短距甚至短距,未來從自動駕駛的不的功能需求角度看,都有應(yīng)用空間”,他說。
1890
木火柴 ??? 4年前
20條/頁 
 51
51 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
